TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097110
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023213206
出願日
2023-12-18
発明の名称
空間状態予測方法および空間状態予測システム
出願人
パナソニックIPマネジメント株式会社
代理人
個人
,
個人
,
個人
主分類
G01D
21/00 20060101AFI20250623BHJP(測定;試験)
要約
【課題】空間の状態を適切に捉えることができる位置に配置されたセンサを用いて空間内の状態量を予測する。
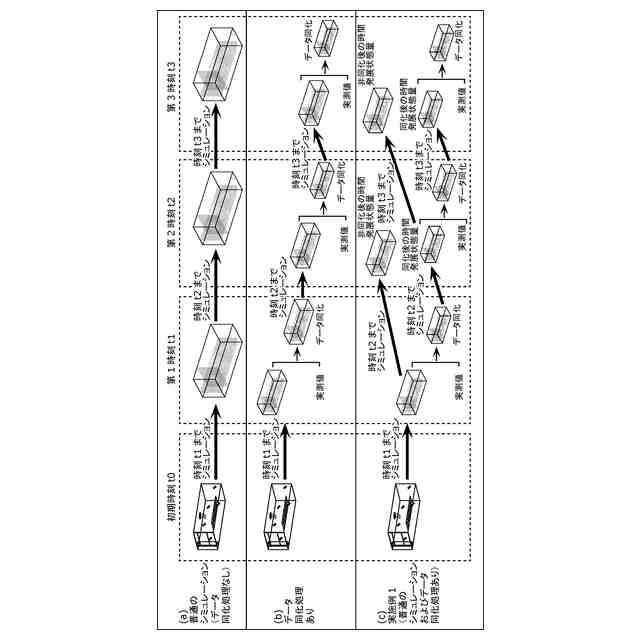
【解決手段】空間10内に配置された複数のセンサ200の測定値を取得する。第1時刻t1における空間10内の複数の位置のシミュレーション上の状態量を複数のセンサ200の測定値を用いてデータ同化処理し、データ同化処理で得られたデータを予測モデルに入力し、第2時刻t2における空間10内の所定の位置の状態量である同化後の時間発展状態量を予測する。第1時刻t1における所定の位置のシミュレーション上の状態量を上記の予測モデルに入力し、第2時刻t2における所定の位置の状態量である非同化後の時間発展状態量を予測する。同化後の時間発展状態量、非同化後の時間発展状態量および第2時刻t2におけるセンサ200の測定値に基づいて、所定の位置に配置されたセンサ200の位置の適否を判断する。
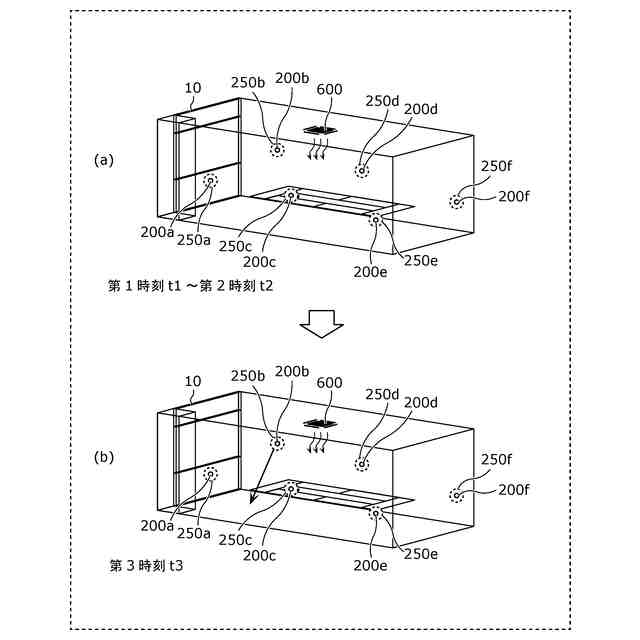
【選択図】図9
特許請求の範囲
【請求項1】
空間内の状態量を検出するセンサの測定値を用いてデータ同化処理を行い、前記空間内の状態量を予測する方法であって、
前記空間内の複数の位置に配置された複数の前記センサの測定値を取得する測定値取得ステップと、
第1時刻における前記空間内の複数の位置のシミュレーション上の状態量を前記第1時刻における複数の前記センサの測定値を用いてデータ同化処理することで同化結果データを取得し、当該同化結果データを前記空間内の状態量の予測モデルに入力して時間発展させることで、前記第2時刻における前記空間内の所定の位置の状態量である同化後の時間発展状態量を予測する同化後予測ステップと、
前記データ同化処理を行わずに、前記第1時刻における前記所定の位置のシミュレーション上の状態量を前記予測モデルに入力して時間発展させることで、前記第2時刻における前記所定の位置の状態量である非同化後の時間発展状態量を予測する非同化後予測ステップと、
前記同化後の時間発展状態量、前記非同化後の時間発展状態量および前記第2時刻における前記センサの測定値に基づいて、前記所定の位置に配置された前記センサの位置の適否を判断する判断ステップと、
を含む空間状態予測方法。
続きを表示(約 1,700 文字)
【請求項2】
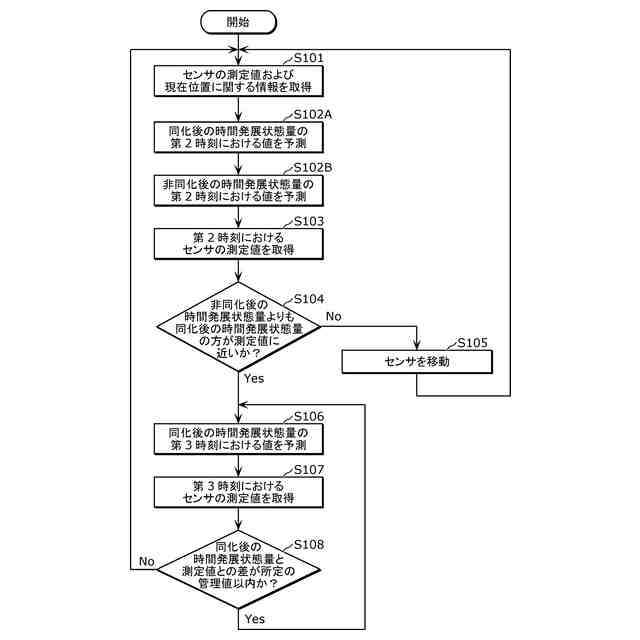
前記判断ステップにおいて、前記第2時刻で比較したとき、前記同化後の時間発展状態量よりも前記非同化後の時間発展状態量のほうが前記センサの測定値に近い場合に、前記所定の位置に配置された前記センサの位置が適切でないと判断する
請求項1に記載の空間状態予測方法。
【請求項3】
さらに、前記センサの位置が適切でないと判断した場合に、前記所定の位置に配置されたセンサを移動させるステップを含む
請求項1または2に記載の空間状態予測方法。
【請求項4】
前記判断ステップにおいて、前記第2時刻で比較したとき、前記非同化後の時間発展状態量よりも前記同化後の時間発展状態量のほうが前記センサの測定値に近い場合に、前記所定の位置に配置された前記センサの位置が適切であると判断し、前記所定の位置に配置されたセンサを移動させない
請求項1に記載の空間状態予測方法。
【請求項5】
前記測定値取得ステップにおいて、前記空間内の複数の位置に配置された複数の前記センサの測定値を取得し、
前記同化後予測ステップにおいて、複数の前記同化後の時間発展状態量を予測し、
前記非同化後予測ステップにおいて、複数の前記非同化後の時間発展状態量を予測し、
前記判断ステップにおいて、複数の前記センサの位置の適否を判断し、複数の前記センサのうち特定のセンサの位置が適切でないと判断した場合に、前記特定のセンサを除く他のセンサの測定値を用いてデータ同化処理を行う
請求項1または2に記載の空間状態予測方法。
【請求項6】
前記測定値取得ステップにおいて、前記空間内の複数の位置に配置された複数の前記センサの測定値を取得し、
前記同化後予測ステップにおいて、複数の前記同化後の時間発展状態量を予測し、
前記非同化後予測ステップにおいて、複数の前記非同化後の時間発展状態量を予測し、
前記判断ステップにおいて、複数の前記センサの位置の適否を判断し、複数の前記センサのうち特定のセンサの位置が適切でないと判断した場合に、前記特定のセンサを除く他のセンサの測定値を用いてRMSE(Root Mean Squared Error)を算出し、当該RMSEの値が所定の値よりも大きい場合に、前記特定のセンサを移動させる
請求項1または2に記載の空間状態予測方法。
【請求項7】
前記第1時刻から前記第2時刻までの期間は、10分以上50分以下の期間である
請求項1または2に記載の空間状態予測方法。
【請求項8】
前記センサは、前記空間内の温度、流速またはガス濃度を測定する
請求項1または2に記載の空間状態予測方法。
【請求項9】
空間内の状態量を検出するセンサの測定値を用いてデータ同化処理を行い、前記空間内の状態量を予測する空間状態予測システムであって、
前記空間内の複数の位置に配置された複数の前記センサの測定値を取得する情報取得部と、
第1時刻における前記空間内の複数の位置のシミュレーション上の状態量を前記第1時刻における複数の前記センサ200の測定値を用いてデータ同化処理することで同化結果データを取得し、当該同化結果データを前記空間内の状態量の予測モデルに入力して時間発展させることで、前記第2時刻における前記空間内の所定の位置の状態量である同化後の時間発展状態量を予測する同化部と、
前記データ同化処理を行わずに、前記第1時刻における前記所定の位置のシミュレーション上の状態量を前記予測モデルに入力して時間発展させることで、前記第2時刻における前記所定の位置の状態量である非同化後の時間発展状態量を予測するシミュレーション部と、
前記同化後の時間発展状態量、前記非同化後の時間発展状態量および前記第2時刻における前記センサの測定値に基づいて、前記所定の位置に配置された前記センサの位置の適否を判断する判断部と、
を備える空間状態予測システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、建物内の空間の状態量を予測する空間状態予測方法、および、その空間状態予測システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
センサを用いて空調システムの気流状態のモデルをリアルタイムに更新する方法が知られている。例えば特許文献1に示された方法では、あらかじめ用意しておいた物理モデルの全てのモードを生成し、空間内に配置されたセンサによって測定された気流状態から再構成されたモードを比較し、物理モデルの支配的なモードに関連付けられる次数低減モデルを選択し空間状態を予測している。
【先行技術文献】
【特許文献】
【0003】
特許第6433588号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば従来の方法では、センサの位置を一度決めた後は、同じ位置に設置されたセンサを用いて空間状態を予測するように構成されている。しかしながら、ドアや窓の開閉、人の動き、日射の変化などによって空間の状態が変化した場合、同じ位置に設置されたセンサでは、変化した空間の状態を捉えることが困難である。したがって、空間の状態を適切に捉えることができる位置に配置されたセンサを用いて空間内の状態量を予測する方法が求められる。
【0005】
本開示は、上記の課題を解決するものであって、空間の状態を適切に捉えることができる位置に配置されたセンサを用いて空間内の状態量を予測することができる空間状態予測方法等を提供する。
【課題を解決するための手段】
【0006】
本開示の一態様に係る空間状態予測方法は、空間内の状態量を検出するセンサの測定値を用いてデータ同化処理を行い、前記空間内の状態量を予測する方法であって、前記空間内の複数の位置に配置された複数の前記センサの測定値を取得する測定値取得ステップと、第1時刻における前記空間内の複数の位置のシミュレーション上の状態量を前記第1時刻における複数の前記センサの測定値を用いてデータ同化処理することで同化結果データを取得し、当該同化結果データを前記空間内の状態量の予測モデルに入力して時間発展させることで、前記第2時刻における前記空間内の所定の位置の状態量である同化後の時間発展状態量を予測する同化後予測ステップと、前記データ同化処理を行わずに、前記第1時刻における前記所定の位置のシミュレーション上の状態量を前記予測モデルに入力して時間発展させることで、前記第2時刻における前記所定の位置の状態量である非同化後の時間発展状態量を予測する非同化後予測ステップと、前記同化後の時間発展状態量、前記非同化後の時間発展状態量および前記第2時刻における前記センサの測定値に基づいて、前記所定の位置に配置された前記センサの位置の適否を判断する判断ステップと、を含む。
【0007】
本開示の一態様に係る空間状態予測システムは、空間内の状態量を検出するセンサの測定値を用いてデータ同化処理を行い、前記空間内の状態量を予測する空間状態予測システムであって、前記空間内の複数の位置に配置された複数の前記センサの測定値を取得する情報取得部と、第1時刻における前記空間内の複数の位置のシミュレーション上の状態量を前記第1時刻における複数の前記センサ200の測定値を用いてデータ同化処理することで同化結果データを取得し、当該同化結果データを前記空間内の状態量の予測モデルに入力して時間発展させることで、前記第2時刻における前記空間内の所定の位置の状態量である同化後の時間発展状態量を予測する同化部と、前記データ同化処理を行わずに、前記第1時刻における前記所定の位置のシミュレーション上の状態量を前記予測モデルに入力して時間発展させることで、前記第2時刻における前記所定の位置の状態量である非同化後の時間発展状態量を予測するシミュレーション部と、前記同化後の時間発展状態量、前記非同化後の時間発展状態量および前記第2時刻における前記センサの測定値に基づいて、前記所定の位置に配置された前記センサの位置の適否を判断する判断部と、を備える。
【0008】
なお、本開示の全般的または具体的な態様は、システム、方法、集積回路、コンピュータプログラムまたはコンピュータ読み取り可能なCD-ROMなどの記録媒体で実現されてもよく、システム、方法、集積回路、コンピュータプログラムおよび記録媒体の任意な組み合わせで実現されてもよい。
【発明の効果】
【0009】
本開示の空間状態予測方法等によれば、空間の状態を適切に捉えることができる位置に配置されたセンサを用いて空間内の状態量を予測することができる。
【図面の簡単な説明】
【0010】
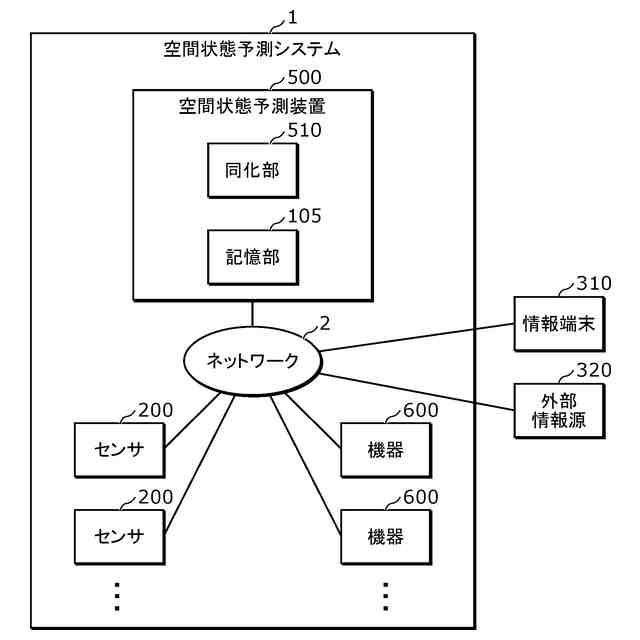
空間状態予測システムの基本構成を示すブロック図である。
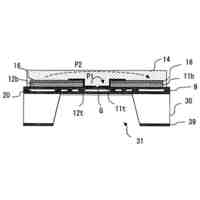
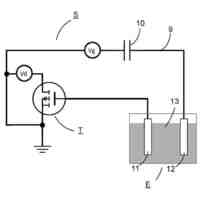
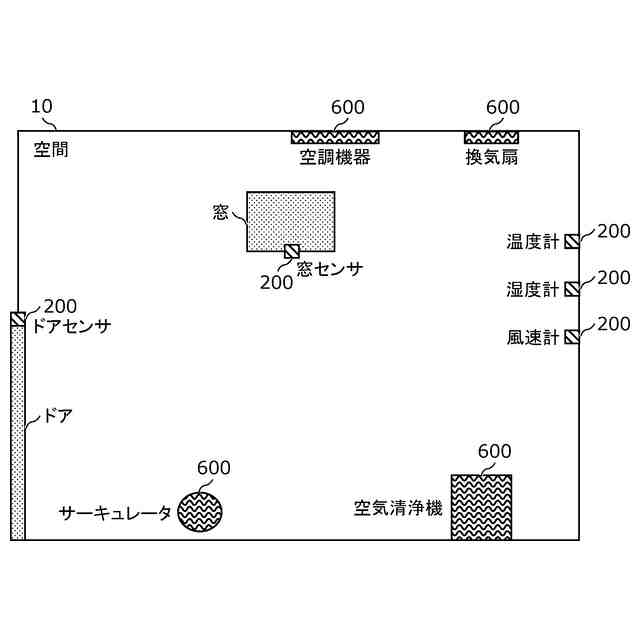
建物内の空間の一例を示す図である。
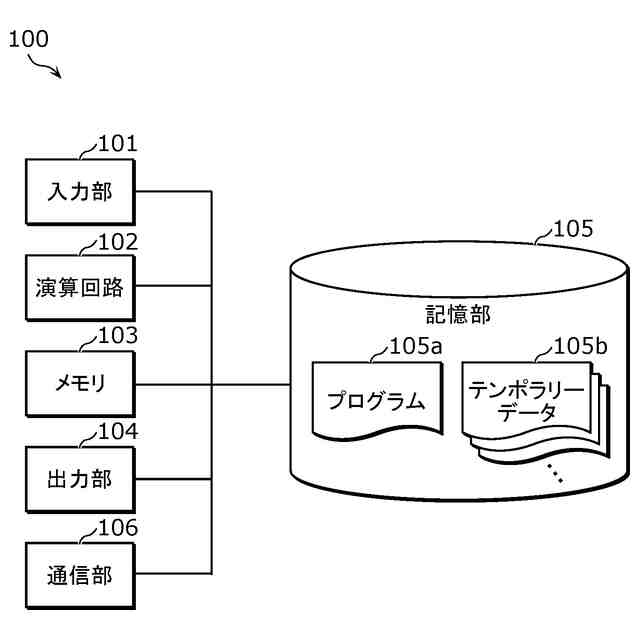
空間状態予測システムに含まれる空間状態予測装置を構成するコンピュータを示す図である。
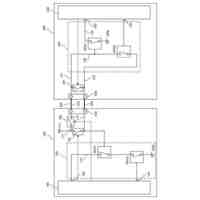
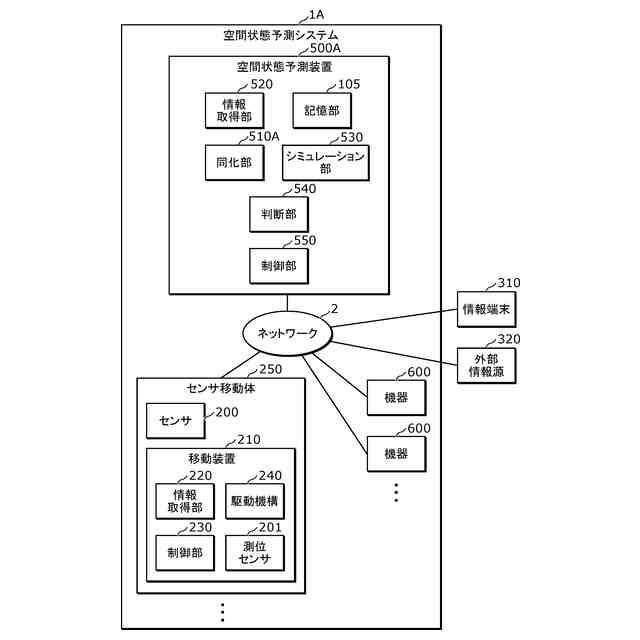
実施例1の空間状態予測システムの構成を示すブロック図である。
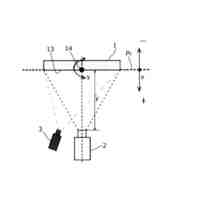
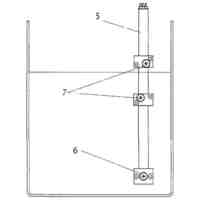
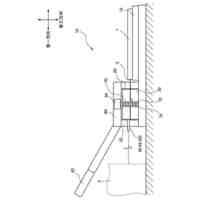
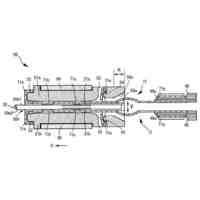
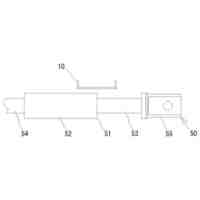
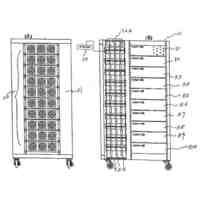
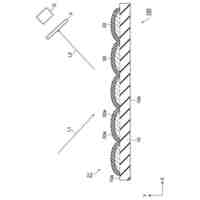
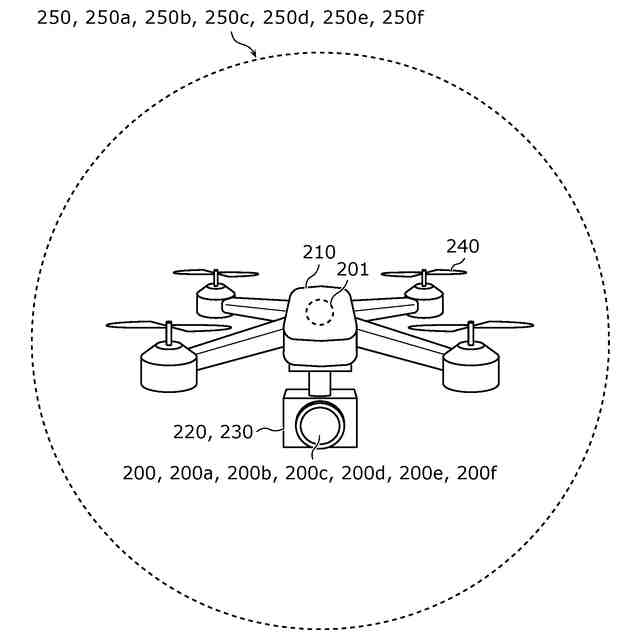
空間内に配置されるセンサ移動体の一例を示す図である。
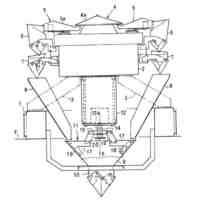
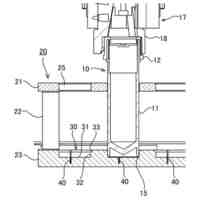
実施例1の空間状態予測システムによる予測が適用される建物内の空間の一例を示す図である。
空間の状態量を予測するためのシミュレーションおよびデータ同化処理の一例を示す図である。
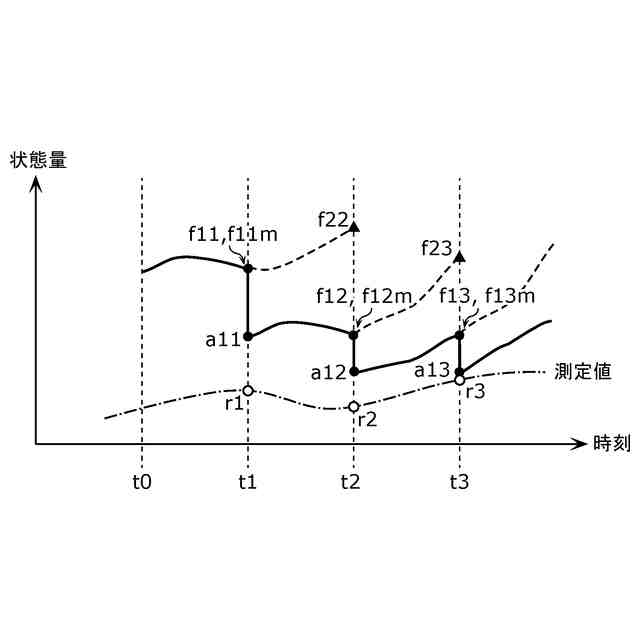
空間内の状態量の変化の一例を示す図である。
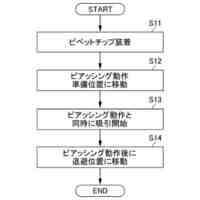
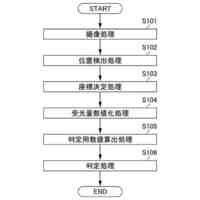
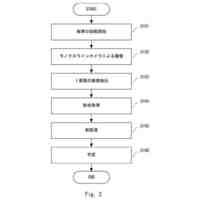
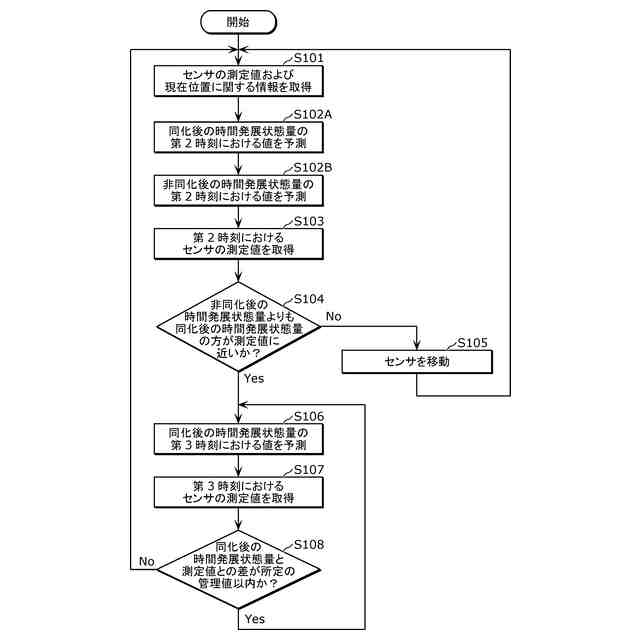
実施例1の空間状態予測方法を示すフローチャートである。
実施例2の空間状態予測方法を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
計器装置
19日前
株式会社東光高岳
計器
15日前
株式会社ミツトヨ
測定器
12日前
日本精機株式会社
液面検出装置
21日前
大和製衡株式会社
組合せ秤
27日前
大和製衡株式会社
組合せ秤
21日前
大和製衡株式会社
組合せ秤
21日前
大同特殊鋼株式会社
疵検出方法
12日前
個人
フロートレス液面センサー
1か月前
日本特殊陶業株式会社
ガスセンサ
13日前
日本特殊陶業株式会社
ガスセンサ
1か月前
ダイハツ工業株式会社
試験用治具
27日前
日本特殊陶業株式会社
ガスセンサ
22日前
日本特殊陶業株式会社
ガスセンサ
22日前
エグゼヴィータ株式会社
端末装置
13日前
日本特殊陶業株式会社
ガスセンサ
13日前
バイオテック株式会社
容器設置装置
13日前
柳井電機工業株式会社
部材検査装置
13日前
タカノ株式会社
試料分析装置
12日前
タカノ株式会社
試料分析装置
12日前
株式会社クボタ
作業車
26日前
日本装置開発株式会社
X線検査装置
今日
富士電機株式会社
エンコーダ
14日前
富士電機株式会社
エンコーダ
14日前
株式会社フジキン
流量測定装置
28日前
JNC株式会社
トランジスタ型センサ
12日前
トヨタ自動車株式会社
歯車の検査方法
22日前
旭光電機株式会社
漏出検出装置
1か月前
TDK株式会社
計測装置
20日前
株式会社ノーリツ
通信システム
19日前
新電元メカトロニクス株式会社
位置検出装置
19日前
JNC株式会社
トランジスタ型センサ
12日前
株式会社アステックス
ラック型負荷装置
1か月前
株式会社島津製作所
発光分析装置
19日前
ウシオ電機株式会社
光学測定装置
12日前
住友化学株式会社
積層基板
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ