TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097097
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023213178
出願日
2023-12-18
発明の名称
モータ回転制御装置、モータ回転制御方法、及び、距離測定装置
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人栄光事務所
主分類
H02P
27/08 20060101AFI20250623BHJP(電力の発電,変換,配電)
要約
【課題】モータを目標の回転速度で安定的に回転させる。
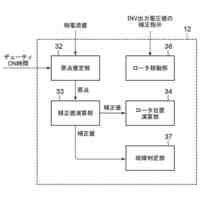
【解決手段】モータ回転制御装置は、モータの回転速度の測定結果である測定回転速度を出力する回転監視回路と、所定の上限値と下限値とを一定周期で繰り返す外乱信号を出力する外乱注入回路と、回転監視回路から出力された測定回転速度とモータの目標とする回転速度である目標回転速度との間の偏差に基づく操作量に対して外乱信号を合成した信号を出力する回転制御回路と、回転制御回路から出力される信号に基づく電流又は電圧を前記モータに印加するモータドライバ回路とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
モータの回転速度の測定結果である測定回転速度を出力する回転監視回路と、
所定の上限値と下限値とを一定周期で繰り返す外乱信号を出力する外乱注入回路と、
前記回転監視回路から出力された前記測定回転速度と、前記モータの目標とする回転速度である目標回転速度との間の偏差に基づく操作量に対して前記外乱信号を合成した信号を出力する回転制御回路と、
前記回転制御回路から出力される信号に基づく電流又は電圧を前記モータに印加するモータドライバ回路と、を備える、
モータ回転制御装置。
続きを表示(約 760 文字)
【請求項2】
前記回転制御回路が出力する信号は、Pulse Width Modulation(PWM)信号であり、
前記モータドライバ回路が前記モータに印加する電流又は電圧は、前記PWM信号のデューティ比に基づく、
請求項1に記載のモータ回転制御装置。
【請求項3】
前記モータドライバ回路の出力側のデューティ比の分解能は、前記モータドライバ回路の入力側のデューティ比の分解能よりも、低い、
請求項2に記載のモータ回転制御装置。
【請求項4】
前記外乱信号の前記所定の上限値と下限値との間の大きさは、前記モータドライバ回路の前記出力側のデューティ比の分解能の大きさよりも、大きい、
請求項3に記載のモータ回転制御装置。
【請求項5】
前記外乱信号の一定周期は、前記モータの制御帯域に対応する周期よりも短く、前記モータドライバ回路が出力する前記PWM信号の周期よりも長い、
請求項2に記載のモータ回転制御装置。
【請求項6】
モータの回転速度の測定結果である測定回転速度を監視し、
所定の上限値と下限値とを一定周期で繰り返す外乱信号を出力し、
測定された前記測定回転速度と、前記モータの目標とする回転速度である目標回転速度との間の偏差に基づいて操作量を算出し、当該操作量に対して前記外乱信号を合成した信号を出力し、
出力された前記外乱信号を合成した信号に基づく電流又は電圧を前記モータに印加する、
モータ回転制御方法。
【請求項7】
物体までの距離を測定する距離測定装置であって、
請求項1に記載のモータ回転制御装置を備えた、
距離測定装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モータ回転制御装置、モータ回転制御方法、及び、距離測定装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
エンコーダを用いてモータの回転を制御する回転制御装置が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開平1-132967号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
モータに印加する電流又は電圧を制御することによりモータの回転速度を変化させることができるが、モータを目標の回転速度で安定的に回転させることは難しい。
【0005】
本開示の目的は、モータを目標の回転速度で安定的に回転させる技術を提供することにある。
【課題を解決するための手段】
【0006】
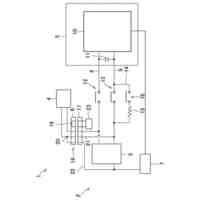
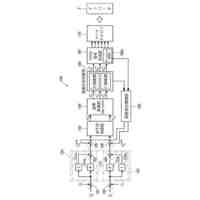
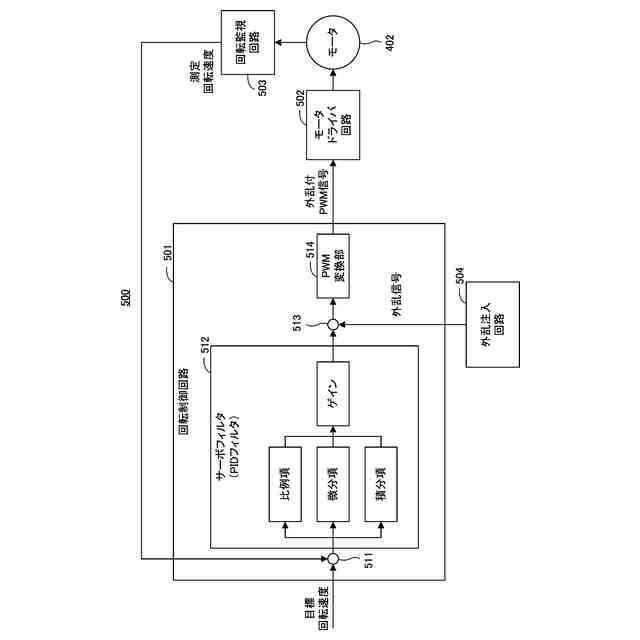
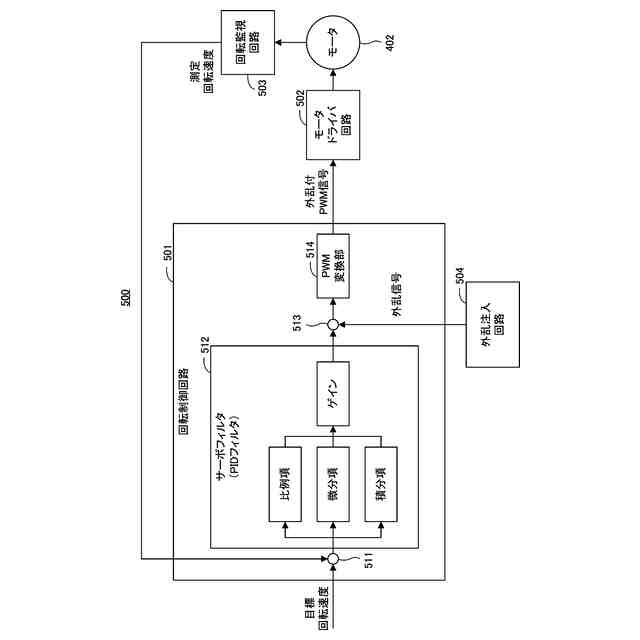
本開示の一態様に係るモータ回転制御装置は、モータの回転速度の測定結果である測定回転速度を出力する回転監視回路と、所定の上限値と下限値とを一定周期で繰り返す外乱信号を出力する外乱注入回路と、前記回転監視回路から出力された前記測定回転速度と、前記モータの目標とする回転速度である目標回転速度との間の偏差に基づく操作量に対して前記外乱信号を合成した信号を出力する回転制御回路と、前記回転制御回路から出力される信号に基づく電流又は電圧を前記モータに印加するモータドライバ回路と、を備える。
【0007】
本開示の一態様に係るモータ回転制御方法は、モータの回転速度の測定結果である測定回転速度を監視し、所定の上限値と下限値とを一定周期で繰り返す外乱信号を出力し、測定された前記測定回転速度と、前記モータの目標とする回転速度である目標回転速度との間の偏差に基づいて操作量を算出し、当該操作量に対して前記外乱信号を合成した信号を出力し、前記回転制御回路から出力される信号に基づく電流又は電圧を前記モータに印加する。
【0008】
本開示の一態様に係る距離測定装置は、物体までの距離を測定する距離測定装置であって、上記のモータ回転制御装置を備える。
【発明の効果】
【0009】
本開示によれば、モータを目標の回転速度で安定的に回転させることができる。
【図面の簡単な説明】
【0010】
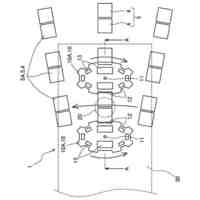
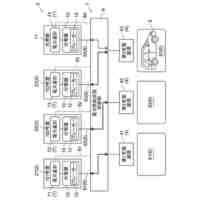
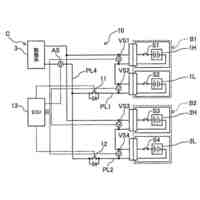
実施の形態1に係るモータ回転制御装置の構成例を示すブロック図
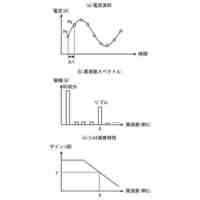
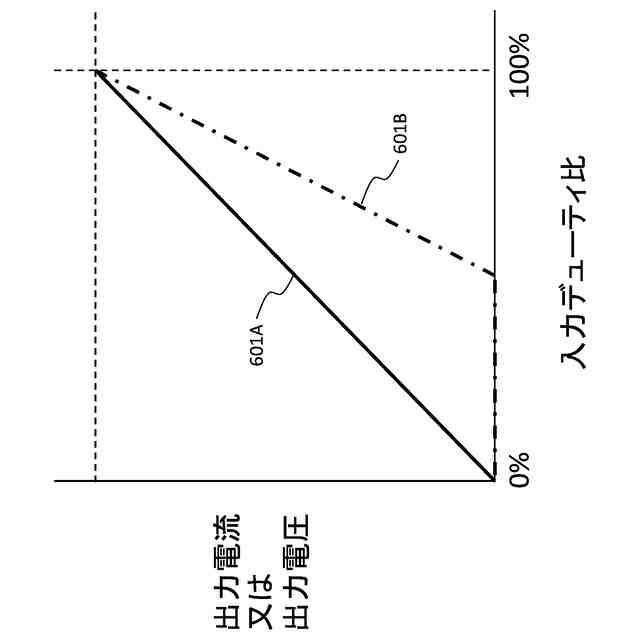
入力デューティ比と出力電流又は出力電圧との対応関係の一例を示すグラフ
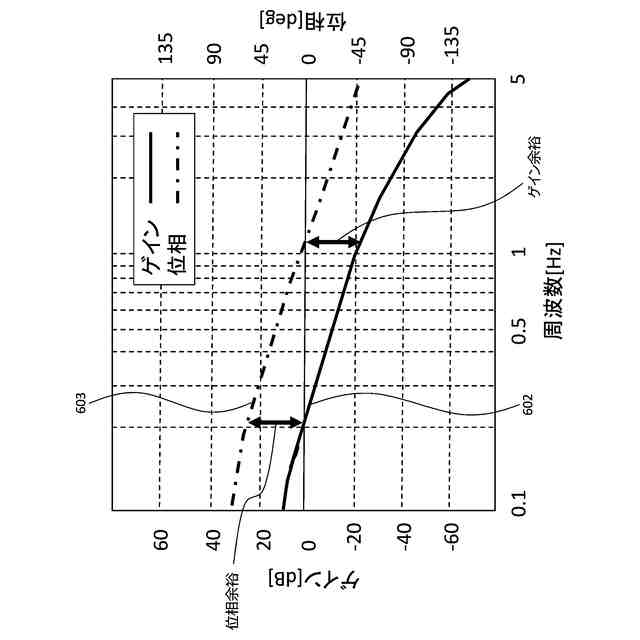
モータの回転制御のループ特性の一例を示すグラフ
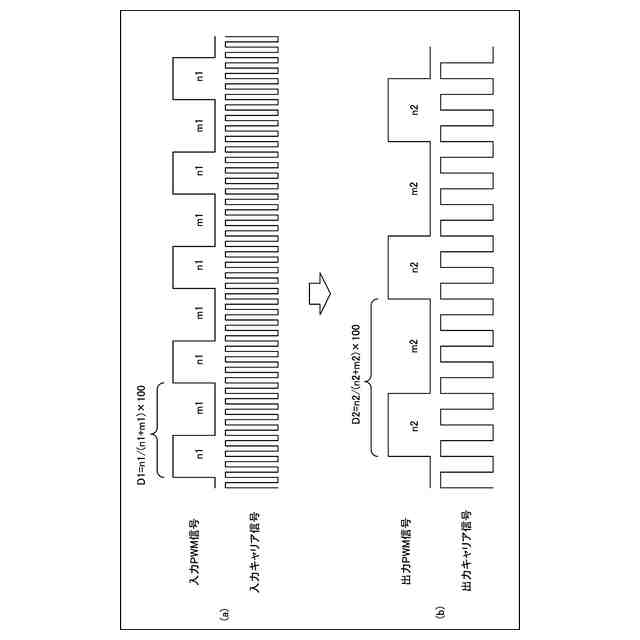
従来のモータドライバ回路における入力PWM信号及び入力キャリア信号と、出力PWM信号及び出力キャリア信号とを説明するための図
従来のモータドライバ回路における入力デューティ比と出力デューティ比との関係を説明するための図
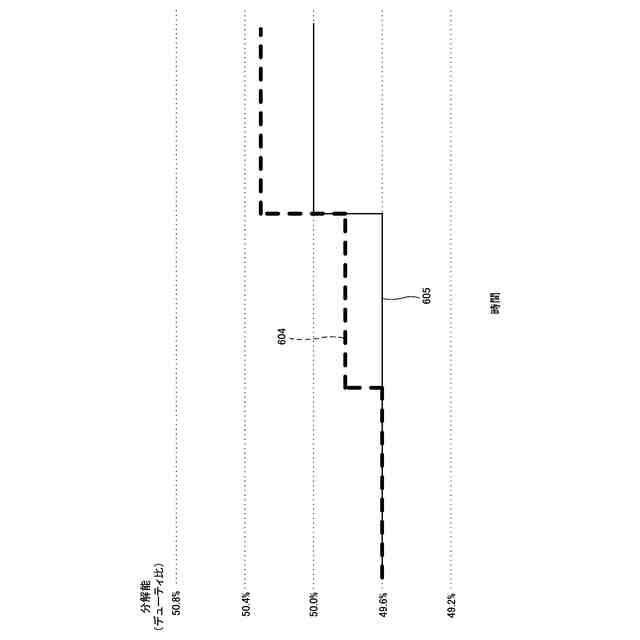
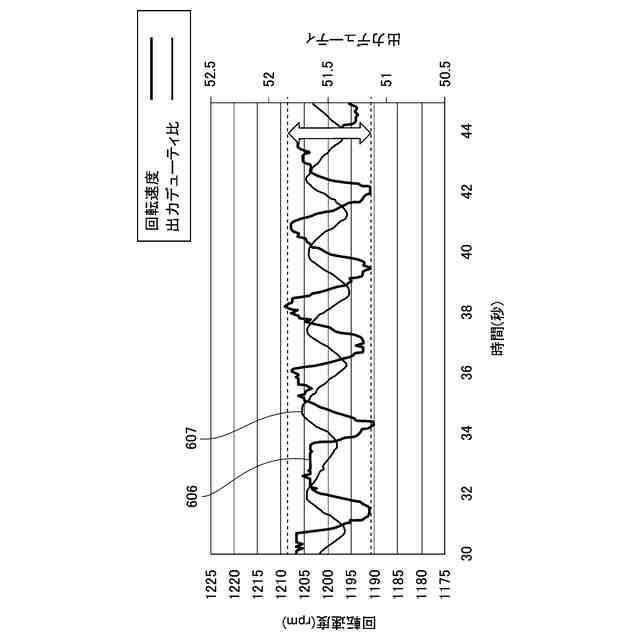
従来の出力デューティ比とモータの回転速度との時間変化の一例を示すグラフ
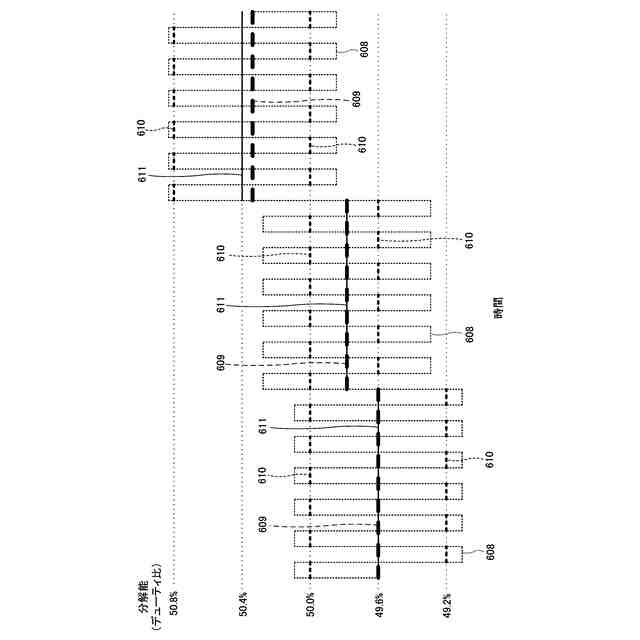
本実施の形態に係るモータドライバ回路における出力デューティ比と平均出力デューティ比の関係を説明するための図
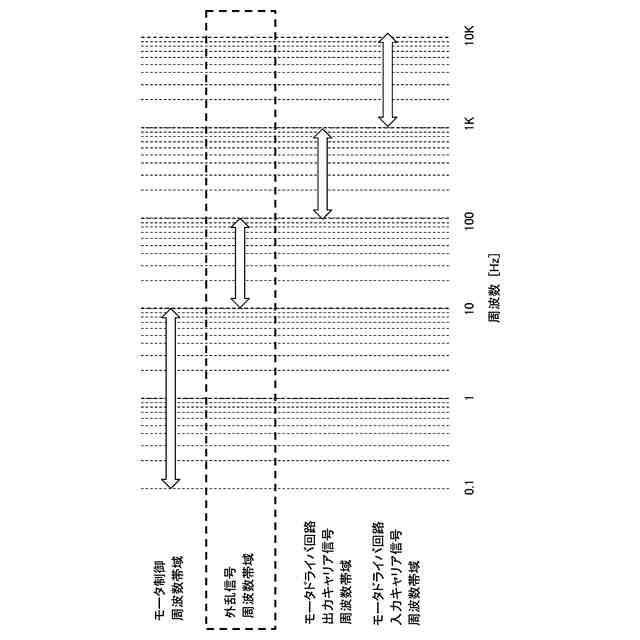
本実施の形態に係る外乱信号の周波数帯域の一例を示す図
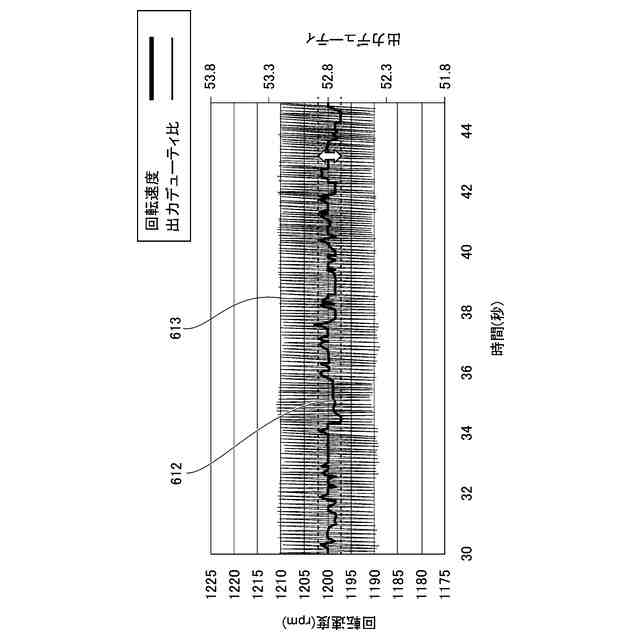
本実施の形態に係る出力デューティ比とモータの回転速度との時間変化の一例を示すグラフ
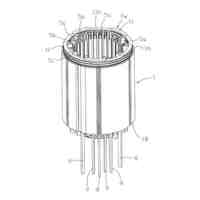
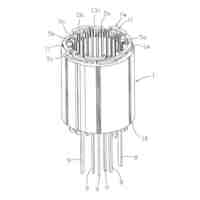
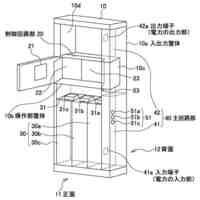
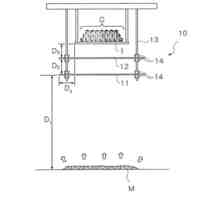
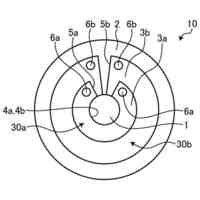
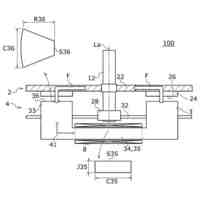
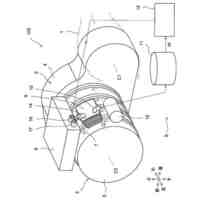
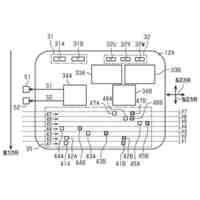
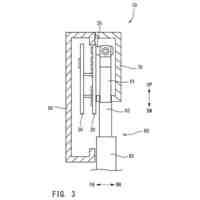
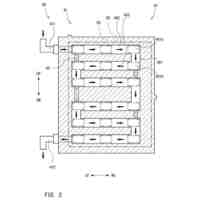
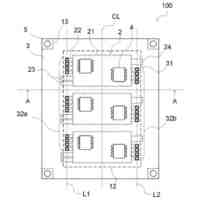
実施の形態1に係る距離測定装置の外観斜視図
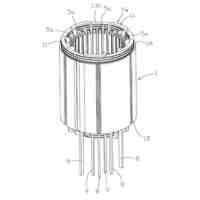
実施の形態1に係る距離測定装置の縦断面図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
恒久電源開発の装置
15日前
キヤノン株式会社
電源装置
8日前
株式会社竹中工務店
避雷設備
8日前
ダイハツ工業株式会社
溶接装置
15日前
トヨタ自動車株式会社
充電方法
1日前
トヨタ自動車株式会社
充電装置
17日前
愛知電機株式会社
ステータおよびモータ
15日前
愛知電機株式会社
ステータおよびモータ
15日前
愛知電機株式会社
ステータおよびモータ
15日前
サンデン株式会社
モータ制御装置
15日前
株式会社エスイー
上載物の支持装置
8日前
新電元工業株式会社
充電装置
1日前
因幡電機産業株式会社
充電システム
15日前
AGC株式会社
太陽電池モジュール
8日前
ダイハツ工業株式会社
絶縁紙成型装置
11日前
住友金属鉱山株式会社
遮熱装置
2日前
三菱電機株式会社
回転子および電動機
8日前
矢崎総業株式会社
電池切替装置
17日前
スズキ株式会社
車両用モータ構造
15日前
住友重機械工業株式会社
回転電機
11日前
三菱電機株式会社
束線器具
18日前
株式会社ゲットクリーンエナジー
発電機
8日前
多摩川精機株式会社
逆起電圧可変モータ
10日前
日産自動車株式会社
光電変換装置
8日前
株式会社IJTT
オイル冷却装置
15日前
株式会社ジェイテクト
モータ装置
4日前
トヨタ自動車株式会社
積層鋼板の製造方法
15日前
トヨタ自動車株式会社
充電システム
4日前
トヨタ自動車株式会社
積層鋼板の製造方法
10日前
ヤマハ発動機株式会社
電力変換装置
10日前
ニチコン株式会社
電源回路
16日前
ヤマハ発動機株式会社
電力変換装置
10日前
コーセル株式会社
電源装置及びその制御方法
8日前
サンデン株式会社
電力変換装置
16日前
三菱電機株式会社
電力変換装置
18日前
トヨタ自動車株式会社
電源装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ