TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025094928
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2024217514
出願日
2024-12-12
発明の名称
悪天候気象環境に起因して発生したライダセンサの雑音を除去するシステムとその動作方法
出願人
個人
,
Electronics and Telecommunications Research Institute
代理人
個人
,
個人
,
個人
主分類
G01S
17/89 20200101AFI20250618BHJP(測定;試験)
要約
【課題】悪天候気象環境に起因して発生したライダセンサの雑音を除去するシステムとその動作方法を提供する。
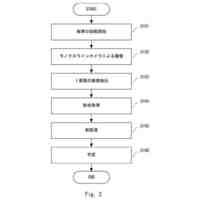
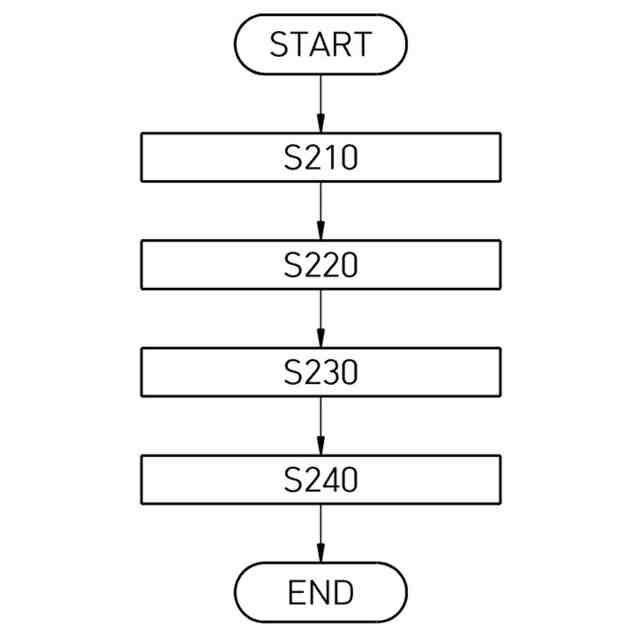
【解決手段】本発明に係るライダセンサ雑音除去システムにおいて、プロセッサは、ライダセンサから、雑音が含まれた第1ポイントクラウドの入力を受ける段階S210と、第1ポイントクラウドに基づいて2次元の第1距離映像と2次元の第1反射率映像を生成する段階S220と、第1距離映像と第1反射率映像を予め学習された機械学習モデルに入力して2次元の第1雑音境界面映像を生成する段階S230と、第1雑音境界面映像を利用して第1ポイントクラウドに含まれた雑音を除去する段階S240と、を含む命令を実行する。
【選択図】図7
特許請求の範囲
【請求項1】
ライダセンサ雑音除去システムの動作方法において、
(a)前記ライダセンサ雑音除去システムが、ライダセンサから、雑音が含まれた第1ポイントクラウドの入力を受ける段階;
(b)前記ライダセンサ雑音除去システムが、前記第1ポイントクラウドに基づいて2次元の第1距離映像と2次元の第1反射率映像を生成する段階;
(c)前記ライダセンサ雑音除去システムが、前記第1距離映像と第1反射率映像を予め学習された機械学習モデルに入力して2次元の第1雑音境界面映像を生成する段階;および
(d)前記ライダセンサ雑音除去システムが、前記第1雑音境界面映像を利用して前記第1ポイントクラウドに含まれた雑音を除去する段階;を含む、ライダセンサ雑音除去システムの動作方法。
続きを表示(約 1,600 文字)
【請求項2】
前記(b)は、
前記ライダセンサ雑音除去システムが、前記ライダセンサの単一ビーム出力のインパルス応答と、前記第1ポイントクラウドの座標と、後方散乱効果が反映された適応型媒介変数を利用して前記第1ポイントクラウドに含まれた各ポイントに対する反射率を推定し、前記反射率に基づいて前記第1反射率映像を生成するものである、請求項1に記載のライダセンサ雑音除去システムの動作方法。
【請求項3】
前記(b)は、
前記ライダセンサ雑音除去システムが、前記第1ポイントクラウドの中でz座標が負数であるポイントに対する反射率を所定の加重値を適用して増加させることを含むものである、請求項2に記載のライダセンサ雑音除去システムの動作方法。
【請求項4】
(e)前記ライダセンサ雑音除去システムが、雑音ポイントに雑音ラベルが付与された、予め収集された第2ポイントクラウドに基づいて第2距離映像と第2反射率映像を生成する段階;
(f)前記ライダセンサ雑音除去システムが、前記第2距離映像で前記雑音ラベルが付与された前記雑音ポイントを除去して第3距離映像を生成し、前記第3距離映像に1以下の定数をかけて第2雑音境界面映像を生成する段階;および
(g)前記ライダセンサ雑音除去システムが、前記第2距離映像、前記第2反射率映像および前記第2雑音境界面映像を学習データにして前記機械学習モデルを学習させる段階;をさらに含む、請求項1に記載のライダセンサ雑音除去システムの動作方法。
【請求項5】
前記(f)は、
前記ライダセンサ雑音除去システムが、前記第2雑音境界面映像に現れた雑音境界面より距離が大きい雑音ポイントがある場合、前記距離が大きい雑音ポイントに対応する前記雑音境界面のポイントが、前記距離が大きい雑音ポイントより距離が大きくなるように前記第2雑音境界面映像を補正することをさらに含むものである、請求項4に記載のライダセンサ雑音除去システムの動作方法。
【請求項6】
前記(f)は、
前記ライダセンサ雑音除去システムが、前記第2雑音境界面映像に境界保存スムージング(edge-preserving smoothing)を遂行するのを含むものである、請求項4に記載のライダセンサ雑音除去システムの動作方法。
【請求項7】
前記機械学習モデルは、
生成型モデルである、請求項4に記載のライダセンサ雑音除去システムの動作方法。
【請求項8】
前記(g)は、
(h)前記ライダセンサ雑音除去システムが、前記第2距離映像と前記第2反射率映像を学習データにして前記機械学習モデルに含まれたエンコーダ(encoder)を学習させる段階;および
(i)前記ライダセンサ雑音除去システムが、学習された前記エンコーダを固定し、前記第2距離映像、前記第2反射率映像および前記第2雑音境界面映像を学習データにして前記機械学習モデルに含まれたデコーダ(decoder)を学習させる段階を含むものである、請求項7に記載のライダセンサ雑音除去システムの動作方法。
【請求項9】
前記(i)は、
前記ライダセンサ雑音除去システムが、前記デコーダの出力と前記第2雑音境界面映像間の再構成損失(reconstruction loss)を計算し、前記再構成損失が減少するように前記デコーダを学習させることを含むものである、請求項8に記載のライダセンサ雑音除去システムの動作方法。
【請求項10】
(j)前記ライダセンサ雑音除去システムが、予め構築された気象シミュレータを利用して前記雑音ポイントと前記雑音ポイントに付与される前記雑音ラベルを生成する段階;をさらに含む、請求項4に記載のライダセンサ雑音除去システムの動作方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行車両で核心的に使われるライダセンサで悪天候時に発生する雑音を効果的に除去する方法とこれを実行するシステムに関する。
続きを表示(約 1,900 文字)
【0002】
具体的には、雪、雨、霧などの悪天候の気象状況では大気中に多量の微細浮遊物(floating particle)が発生するが、この微細浮遊物はライダセンサのレーザービームの経路を妨害して雑音として作用することになる。本発明はこのような雑音を効果的に除去するライダセンサ雑音除去システムとその動作方法に関する。
【背景技術】
【0003】
車両用ライダセンサの雑音を除去する方法は大きく統計的接近方法と学習を利用した方法に分けることができる。
【0004】
統計的接近方法はポイントクラウドの分布に対する統計的特性を利用する方法である。代表的にDynamic Radius Outlier Removal(DROR、[1])とDynamic Statistical Outlier Removal(DSOR、[2])方法がある。
【0005】
DRORはこの分野の最初の研究結果であり、各点の隣りの点の個数を基盤としている。DRORはK-dツリーを構成し、動的検索半径を使って求められた隣りの数でアウトライアを判断するが、ターゲットの点の密度が距離に反比例する特徴を利用する。各地点の検索半径は距離により動的に調整される。
【0006】
DSORも、最も近い隣の検索に依存するが、各点の固定された隣の数を基準として相対距離の平均と分散を計算する。すなわち、DSORは各ポイント周辺のローカル密度を推定してこれを基準としてフィルタリングする。
【0007】
学習による方法としてはウェザーネット(WeatherNet、[3])が最も代表的なアルゴリズムである。ウェザーネット(WeatherNet)はライダ(LiDAR)意味論的分割方法を使って、互いに異なる気象条件でポイントクラウドノイズを減らし、セマンティック分割ネットワークを生成するように学習データを構成した。
【0008】
4DenoiseNet([4])は時間的に連続的なポイントクラウドデータおよび意味論的分割ネットワークを使うノイズ分類方法を提示した。4DenoiseNetでは意味論的分割ネットワークを訓練するために相当な量の仮想合成データが使われる。
【先行技術文献】
【特許文献】
【0009】
大韓民国公開特許公報10-2022-0122392(公開日時2022.9.2.)
大韓民国登録特許公報10-2507068(登録日者2023.3.2.)
【非特許文献】
【0010】
Charron、 Nicholas、 Stephen Phillips、 and Steven L.Waslander.「De-noising of lidar point clouds corrupted by snowfall.「2018 15th Conference on Computer and Robot Vision(CRV)。IEEE、 2018.
Kurup、 Akhil、 and Jeremy Bos.「Dsor: A scalable statistical filter for removing falling snow from lidar point clouds in severe winter weather.「arXiv preprint arXiv:2109.07078(2021)。
Heinzler、Robin、et al.「Cnn-based lidar point cloud de-noising in adverse weather.」IEEE Robotics and Automation Letters 5.2(2020):2514-2521.
Seppanen、Alvari、Risto Ojala、and Kari Tammi.「4denoisenet:Adverse weather denoising from adjacent point clouds.」IEEE Robotics and Automation Letters 8.1(2022):456-463.
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
計器装置
22日前
株式会社東光高岳
計器
18日前
日本精機株式会社
液面検出装置
24日前
株式会社ミツトヨ
測定器
15日前
大和製衡株式会社
組合せ秤
24日前
株式会社国際電気
試験装置
今日
大和製衡株式会社
組合せ秤
24日前
大和製衡株式会社
組合せ秤
1か月前
大同特殊鋼株式会社
疵検出方法
15日前
個人
フロートレス液面センサー
1か月前
ダイハツ工業株式会社
試験用治具
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
エグゼヴィータ株式会社
端末装置
16日前
日本特殊陶業株式会社
ガスセンサ
16日前
日本特殊陶業株式会社
ガスセンサ
25日前
日本特殊陶業株式会社
ガスセンサ
25日前
日本特殊陶業株式会社
ガスセンサ
16日前
バイオテック株式会社
容器設置装置
16日前
柳井電機工業株式会社
部材検査装置
16日前
タカノ株式会社
試料分析装置
15日前
日本装置開発株式会社
X線検査装置
3日前
株式会社クボタ
作業車
29日前
WOTA株式会社
液位検出システム
今日
富士電機株式会社
エンコーダ
17日前
オムロン株式会社
スイッチング装置
今日
富士電機株式会社
エンコーダ
17日前
タカノ株式会社
試料分析装置
15日前
トヨタ自動車株式会社
歯車の検査方法
25日前
株式会社ノーリツ
通信システム
22日前
JNC株式会社
トランジスタ型センサ
15日前
JNC株式会社
トランジスタ型センサ
15日前
新電元メカトロニクス株式会社
位置検出装置
22日前
株式会社フジキン
流量測定装置
1か月前
TDK株式会社
計測装置
23日前
旭光電機株式会社
漏出検出装置
1か月前
帝国通信工業株式会社
圧力センサ
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ