TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025089863
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2023204788
出願日
2023-12-04
発明の名称
制御システム、制御方法
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
H02P
27/06 20060101AFI20250609BHJP(電力の発電,変換,配電)
要約
【課題】システム全体の挙動を考慮して、サージ電圧を抑制し、かつ、スイッチング損失を最小化する。
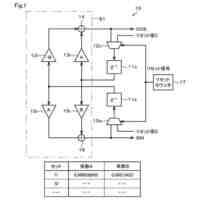
【解決手段】制御システム1は、モータ10とインバータ20とから構成されるモータ駆動システムを、アクティブゲート制御により制御する。制御システム1は、ゲート電流指令を生成するゲート電流指令生成部80と、ゲート電流指令に基づいたゲート電流をスイッチング素子Tr1~Tr6のゲートに供給する駆動回路30と、を備える。ゲート電流指令生成部は、ブラックボックス最適化を用いて、モータ10の駆動状態とインバータ20の駆動状態とを反映させた、スイッチング素子Tr1~Tr6それぞれについて、オン/オフの組み合わせと、スイッチング期間をあらかじめ決められた数で分割した区間ごとのゲート電流の組み合わせと、を決定し、ゲート電流指令を生成する。
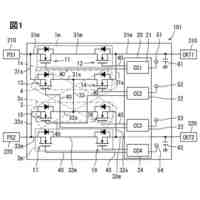
【選択図】図1
特許請求の範囲
【請求項1】
モータ(10)と、複数のスイッチング素子(Tr1~Tr6)がブリッジ接続されたブリッジ回路から構成され、前記モータへの電力供給を制御するインバータ(20)と、から構成されるモータ駆動システムを、アクティブゲート制御により制御する制御システム(1)であって、
ゲート電流指令を生成するゲート電流指令生成部(80)と、
前記ゲート電流指令に基づいたゲート電流を、前記複数のスイッチング素子のゲートにそれぞれ供給することにより、前記複数のスイッチング素子を駆動する駆動回路(30)と、を備え、
前記ゲート電流指令生成部は、
エネルギー損失の最小化のため、ブラックボックス最適化を用いて、前記モータの駆動状態と、前記インバータの駆動状態と、を反映させた、
前記複数のスイッチング素子のオン/オフの組み合わせと、
前記複数のスイッチング素子それぞれについて、スイッチング期間をあらかじめ決められた数で分割した区間ごとのゲート電流の組み合わせと、
を決定し、
前記オン/オフの組み合わせと前記区間ごとのゲート電流の組み合わせとに基づいた前記ゲート電流指令を生成する、
制御システム。
続きを表示(約 740 文字)
【請求項2】
請求項1に記載の制御システムであって、
前記モータ駆動システムは、電動モビリティを動作させるため、前記電動モビリティに搭載されており、
前記電動モビリティに搭載された量子インスパイアードマシンが、前記電動モビリティの運転中において前記モータ駆動システムを制御するため、前記ゲート電流指令生成部として機能する、
制御システム。
【請求項3】
電動モビリティが備えるモータ駆動システムを制御する制御方法であって、
前記モータ駆動システムを制御するためのマップデータを生成するステップであって、
前記マップデータは、前記電動モビリティの生産ラインにおいて前記電動モビリティの走行試験時に、前記電動モビリティに搭載されていない量子インスパイアードマシンが実行するブラックボックス最適化の処理により得られた、
前記モータ駆動システムを構成するモータおよびインバータのそれぞれの駆動状態を反映させた、前記インバータを構成する複数のスイッチング素子のオン/オフの組み合わせと、前記複数のスイッチング素子それぞれについて、スイッチング期間をあらかじめ決められた数で分割した区間ごとのゲート電流の組み合わせと、の集合を含む、
マップデータを生成するステップと、
前記電動モビリティに備えられたメモリに前記マップデータを格納するステップと、
前記電動モビリティが備えるゲート電流指令生成部が、前記電動モビリティの運転中において、前記マップデータを参照してゲート電流指令を生成し、前記複数のスイッチング素子を駆動する駆動回路に前記ゲート電流指令を供給するステップと、
を含む制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御システム、制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1に記載の技術においては、サージ電圧のピーク値と許容電圧との差分が小さくなるようにパワーデバイスのスイッチングの速度を調整することで、スイッチング損失を増加させることなく、サージ電圧を抑制する。
【先行技術文献】
【特許文献】
【0003】
特開2020-10281号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術は、複数のパワーデバイスが相互作用するシステムにおいてシステム全体の挙動を考慮したものではなかった。このため、このようなシステム全体の挙動を考慮して、サージ電圧を抑制し、かつ、スイッチング損失を最小化する技術が求められていた。
【課題を解決するための手段】
【0005】
本開示の一形態よれば、制御システムが提供される。この制御システム(1)は、モータ(10)と、複数のスイッチング素子(Tr1~Tr6)がブリッジ接続されたブリッジ回路から構成され、前記モータへの電力供給を制御するインバータ(20)と、から構成されるモータ駆動システムを、アクティブゲート制御により制御する制御システムであって、ゲート電流指令を生成するゲート電流指令生成部(80)と、前記ゲート電流指令に基づいたゲート電流を、前記複数のスイッチング素子のゲートにそれぞれ供給することにより、前記複数のスイッチング素子を駆動する駆動回路(30)と、を備える。前記ゲート電流指令生成部は、エネルギー損失の最小化のため、ブラックボックス最適化を用いて、前記モータの駆動状態と、前記インバータの駆動状態と、を反映させた、前記複数のスイッチング素子のオン/オフの組み合わせと、前記複数のスイッチング素子それぞれについて、スイッチング期間をあらかじめ決められた数で分割した区間ごとのゲート電流の組み合わせと、を決定し、前記オン/オフの組み合わせと前記区間ごとのゲート電流の組み合わせとに基づいた前記ゲート電流指令を生成する。
【0006】
この形態の制御システムによれば、モータ駆動システム全体の挙動を考慮して、サージ電圧を抑制し、かつ、スイッチング損失を最小化することができる。
【図面の簡単な説明】
【0007】
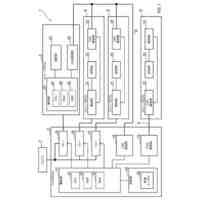
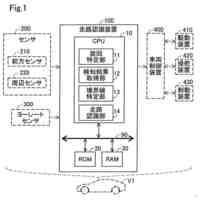
モータ制御システムの概略構成を表す図である。
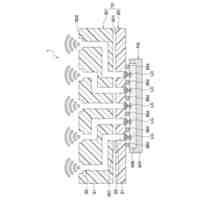
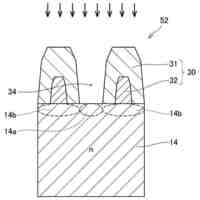
スイッチング素子の寄生容量についての説明図である。
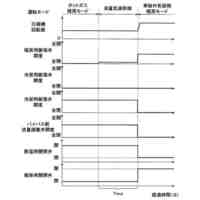
ターンオン動作についての説明図である。
ターンオフ動作についての説明図である。
スイッチング損失についての説明図である。
スルーレート制御についての説明図である。
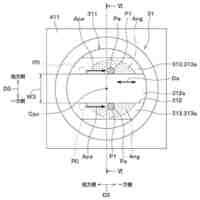
量子ビットの割り当てについての説明図である。
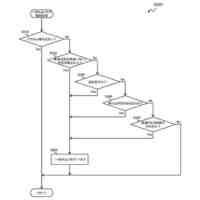
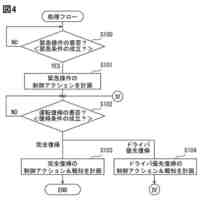
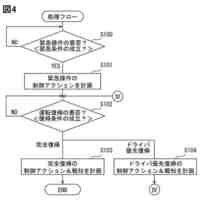
トルク指令部が実行する最適化処理のフローチャートである。
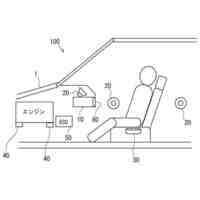
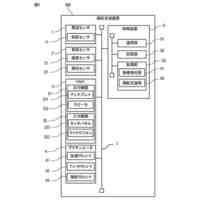
第3実施形態にかかるモータ制御システムの概略構成を表す図である。
マップデータ生成処理のフローチャートである。
マップデータの例を示す説明図である。
【発明を実施するための形態】
【0008】
A.第1実施形態:
図1に示す、モータ制御システム1は、モータ駆動システムを制御する。モータ制御システム1は、モータ10と、インバータ20と、ゲート駆動回路30と、バッテリユニット40と、センサ群50と、トルク指令部70と、駆動指令生成部80と、を備える。負荷としてのモータ10と、インバータ20と、を合わせてモータ駆動システムという。
【0009】
モータ10は、三相交流ブラシレスモータにより構成される。モータ10は、後述するインバータ20から供給される電圧および電流に応じた回転数およびトルクで回転する。なお、本実施形態においてモータ10は電動機として機能するが、モータ10は、電動発電機としてのいわゆるモータジェネレータとして機能するものであってもよい。
【0010】
インバータ20は、後述するバッテリユニット40から供給される直流電圧を三相交流電圧に変換してモータ10に供給することにより、モータ10を駆動する。インバータ20が備えるインバータ回路21は、U相、V相、W相の各相に対応して設けられた3つのレグ21u、21v、21wを有する。レグ21uは上アームおよび下アームにそれぞれ設けられたスイッチング素子Tr1およびTr2により、U相の電力供給の実行と停止とを切り替える。レグ21vは上アームおよび下アームにそれぞれ設けられたスイッチング素子Tr3およびTr4により、V相の電力供給の実行と停止とを切り替える。レグ21wは上アームおよび下アームにそれぞれ設けられたスイッチング素子Tr5およびTr6により、W相の電力供給の実行と停止とを切り替える。スイッチング素子Tr1~Tr6は、炭化珪素(SiC)、シリコン(Si)、または、窒化ガリウム(GaN)により形成されたパワー半導体素子である。本実施形態において、スイッチング素子Tr1~T6がMOSFETである例を説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
ステータ
12日前
株式会社デンソー
ステータ
12日前
株式会社デンソー
電子装置
5日前
株式会社デンソー
電気装置
5日前
株式会社デンソー
電流センサ
3日前
株式会社デンソー
差動通信回路
4日前
株式会社デンソー
電源切替回路
3日前
株式会社デンソー
状態推定装置
3日前
株式会社デンソー
電子制御装置
3日前
株式会社デンソー
機器モジュール
5日前
株式会社デンソー
コイルユニット
3日前
株式会社デンソー
マイクロホン装置
4日前
株式会社デンソー
圧縮機モジュール
4日前
株式会社デンソーテン
ディスプレイ装置
6日前
株式会社デンソー
水素ガスバリア被覆体
6日前
株式会社デンソー
制御システム、制御方法
6日前
株式会社デンソー
回転電機のステータコア
4日前
株式会社デンソー
ヒートポンプサイクル装置
4日前
株式会社SOKEN
導波管
10日前
株式会社デンソー
慣性センサおよびその製造方法
4日前
株式会社デンソーエレクトロニクス
継電器とその継電器の製造方法
6日前
株式会社デンソー
電子制御装置および通信システム
12日前
ダイハツ工業株式会社
恒温装置
3日前
株式会社デンソー
半導体装置及び半導体装置の製造方法
3日前
株式会社デンソーテン
治具、アライメント装置、および端子挿入方法
4日前
株式会社デンソーテン
振動信号生成方法、音響装置、及び音響システム
11日前
トヨタ自動車株式会社
運転支援システムの制御装置
3日前
株式会社デンソー
走路認識装置、走路認識方法およびコンピュータプログラム
11日前
トヨタ自動車株式会社
車両の制御装置、制御方法、制御プログラム
6日前
株式会社デンソー
データ生成装置、電池監視装置、データ生成方法、及びデータ生成プログラム
5日前
トヨタ自動車株式会社
制御装置、運転支援方法、及びコンピュータプログラム
11日前
トヨタ自動車株式会社
車両運転支援装置、車両運転支援方法及びそのプログラム
6日前
株式会社デンソー
運転システム、処理方法、処理プログラム
10日前
株式会社デンソー
運転システム、処理方法、処理プログラム
10日前
トヨタ自動車株式会社
車両周辺環境表示装置、車両周辺環境表示装置の制御方法、及びプログラム
3日前
株式会社豊田中央研究所
慣性力センサおよび慣性力センサの製造方法
6日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ