TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025088443
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023203150
出願日
2023-11-30
発明の名称
再生システムおよび再生方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/26 20060101AFI20250604BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械による作業を詳細に分析することができる再生システムおよび再生方法を提供する。
【解決手段】再生システムは、時刻に対応付けられた作業機械のログ情報と、前記作業機械で撮像され、かつ時刻に対応付けられた撮像動画を表す動画像情報とを取得する取得部と、前記ログ情報に基づく前記作業機械の動作を表す動作情報を前記作業機械の三次元モデルに順次適用することで前記作業機械の動作を表す動作画像を順次再生するとともに、前記動画像情報に基づく撮像画像を前記動作画像に同期させて順次再生する再生部とを備える。
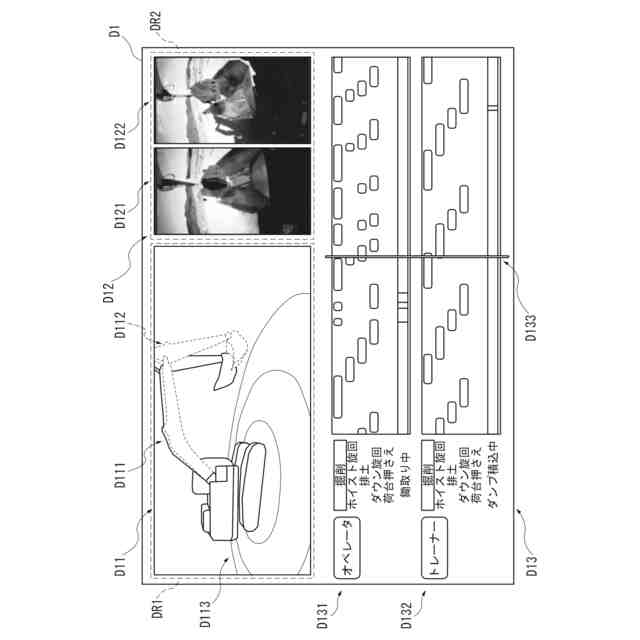
【選択図】図11
特許請求の範囲
【請求項1】
時刻に対応付けられた作業機械のログ情報と、前記作業機械で撮像され、かつ時刻に対応付けられた撮像動画を表す動画像情報とを取得する取得部と、
前記ログ情報に基づく前記作業機械の動作を表す動作情報を前記作業機械の三次元モデルに順次適用することで前記作業機械の動作を表す動作画像を順次再生するとともに、前記動画像情報に基づく撮像画像を前記動作画像に同期させて順次再生する再生部と
を備える再生システム。
続きを表示(約 720 文字)
【請求項2】
前記再生部は、前記動作画像を所定の表示部の第1表示領域内で順次再生するとともに、前記撮像画像を前記表示部の前記第1表示領域とは異なる第2表示領域内で前記動作画像に同期させて順次再生する、
請求項1に記載の再生システム。
【請求項3】
同一の作業現場領域内に同時刻に位置する複数の作業機械を含む俯瞰画像を生成し、前記表示部の前記第1および前記第2表示領域とは異なる第3表示領域内に各前記作業機械を選択可能な形態で含む前記俯瞰画像を表示する俯瞰画像表示部をさらに備え、
前記取得部は、前記俯瞰画像において選択された前記作業機械の前記ログ情報と前記動画像情報とを取得する
請求項2に記載の再生システム。
【請求項4】
前記取得部は、複数の作業機械の各前記ログ情報と各前記動画像情報とを取得し、
前記再生部は、前記各作業機械の前記各動作画像を重畳させて前記第1表示領域内で順次再生するとともに、各前記動画像情報に基づく各前記撮像画像を前記第2表示領域内で並べて再生する
請求項2または3に記載の再生システム。
【請求項5】
時刻に対応付けられた作業機械のログ情報と、前記作業機械で撮像され、かつ時刻に対応付けられた撮像動画を表す動画像情報とを取得するステップと、
前記ログ情報に基づく前記作業機械の動作を表す動作情報を前記作業機械の三次元モデルに順次適用することで前記作業機械の動作を表す動作画像を順次再生するとともに、前記動画像情報に基づく撮像画像を前記動作画像に同期させて順次再生するステップと
を含む再生方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、再生システムおよび再生方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、異なる2つの建設機械(以下、作業機械という)の動きを把握できるようにする再生装置が記載されている。特許文献1に記載されている再生装置は、作業機械のログ情報に含まれる作業機械の角度情報を作業機械の3D(三次元)モデルに順次適用することで作業機械の動作を再生する。この特許文献1に記載されている再生装置では、第1のログ情報に基づく3Dモデルの再生と、第2のログ情報に基づく3Dモデルの再生とが同期させて行われる。
【先行技術文献】
【特許文献】
【0003】
特開2020-183615号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、3Dモデルを用いた作業機械の作業の分析では、例えば土砂等の掘削対象を掘削したバケット等の作業具内における掘削対象の積載状態、作業機械が位置する地形等の周辺の状況等を確認したいというニーズがある。
【0005】
本開示は、上記事情に鑑みてなされたものであり、作業機械による作業を詳細に分析することができる再生システムおよび再生方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の再生システムは、時刻に対応付けられた作業機械のログ情報と、前記作業機械で撮像され、かつ時刻に対応付けられた撮像動画を表す動画像情報とを取得する取得部と、前記ログ情報に基づく前記作業機械の動作を表す動作情報を前記作業機械の三次元モデルに順次適用することで前記作業機械の動作を表す動作画像を順次再生するとともに、前記動画像情報に基づく撮像画像を前記動作画像に同期させて順次再生する再生部とを備える。
【0007】
本開示の再生方法は、時刻に対応付けられた作業機械のログ情報と、前記作業機械で撮像され、かつ時刻に対応付けられた撮像動画を表す動画像情報とを取得するステップと、前記ログ情報に基づく前記作業機械の動作を表す動作情報を前記作業機械の三次元モデルに順次適用することで前記作業機械の動作を表す動作画像を順次再生するとともに、前記動画像情報に基づく撮像画像を前記動作画像に同期させて順次再生するステップとを含む。
【発明の効果】
【0008】
本開示の表示制御装置および表示制御方法によれば、作業機械による作業をより詳細に分析することができる。
【図面の簡単な説明】
【0009】
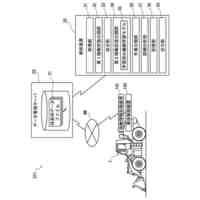
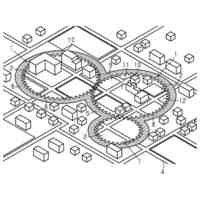
第1の実施形態に係る分析支援システムの全体構成を示す図である。
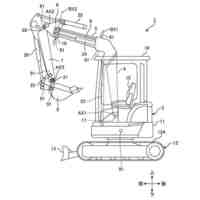
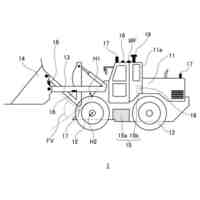
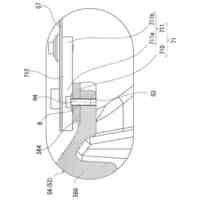
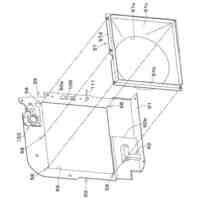
第1の実施形態に係る作業機械の構造を示す図である。
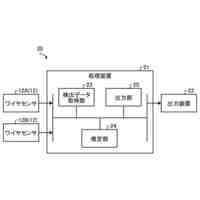
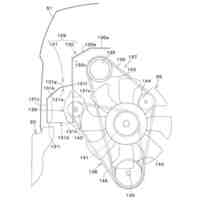
第1の実施形態に係る作業機械の運転室の構成を示す図である。
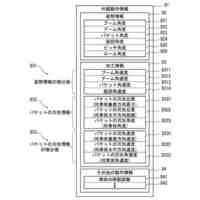
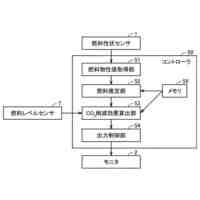
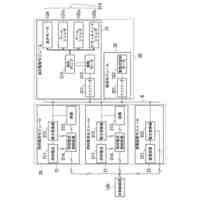
第1の実施形態に係る再生システムの機能構成を示す図である。
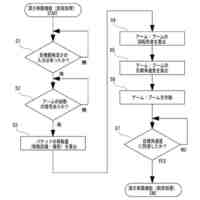
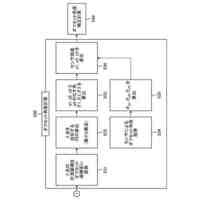
第1の実施形態に係る再生システムの処理フローを示す図である。
第1の実施形態に係るログ情報の例を示す第1の図である。
第1の実施形態に係るログ情報の例を示す第2の図である。
第1の実施形態に係るログ情報の例を示す第3の図である。
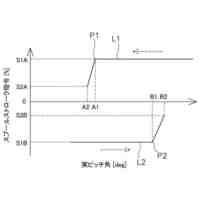
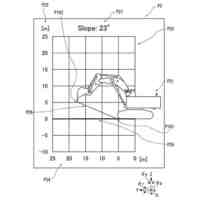
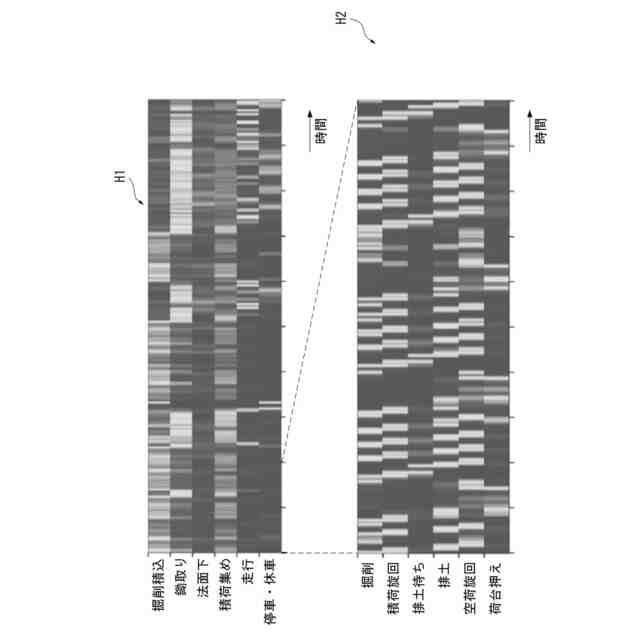
第1の実施形態に係る作業内容の推定に用いるヒートマップを示す図である。
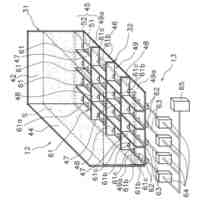
第1の実施形態に係る作業機械モデルの例を示す図である。
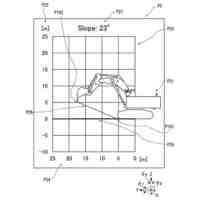
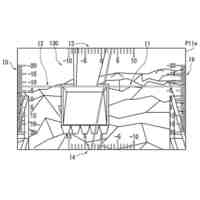
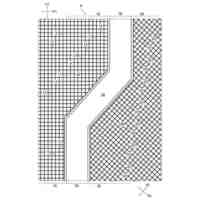
第1の実施形態に係る表示画像の例を示す図である。
第1の実施形態に係る表示画像の例を示す図である。
第1の実施形態に係る表示画像の例を示す図である。
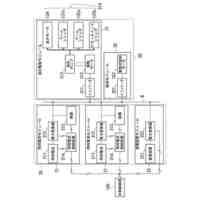
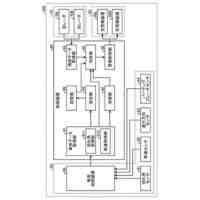
第2の実施形態に係る再生システムの機能構成を示す図である。
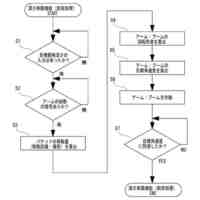
第2の実施形態に係る再生システムの処理フローを示す図である。
第2の実施形態に係る表示画像の例を示す図である。
【発明を実施するための形態】
【0010】
<第1の実施形態>
以下、第1の実施形態に係る再生システムおよび再生方法について、図1~図12を参照しながら詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
減速機
2日前
株式会社小松製作所
耐摩耗部品
25日前
株式会社小松製作所
履帯連結装置
11日前
株式会社小松製作所
再生システムおよび再生方法
2日前
株式会社小松製作所
再生システムおよび再生方法
2日前
株式会社小松製作所
ステータ、電動モータ及び作業機械
4日前
株式会社小松製作所
表示制御システムおよび表示制御方法
2日前
株式会社小松製作所
作業機械、制御方法および作業システム
2日前
株式会社小松製作所
油圧ショベルの較正システム及び較正方法
2日前
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
2日前
株式会社小松製作所
モータグレーダを制御するためのシステムおよび方法
3日前
株式会社小松製作所
モータグレーダを制御するためのシステムおよび方法
3日前
株式会社小松製作所
気体送給システム、造形ボックス、および積層造形方法
10日前
株式会社小松製作所
表示制御システム、表示制御方法および遠隔操作システム
3日前
株式会社小松製作所
表示制御システム、表示制御方法および遠隔操作システム
3日前
株式会社小松製作所
表示制御システム、表示制御方法および遠隔操作システム
8日前
株式会社小松製作所
作業機械の燃料識別システムおよび作業機械の燃料識別方法
2日前
株式会社小松製作所
作業機械、燃料電池システムおよび燃料電池システムを制御するための方法
2日前
株式会社小松製作所
作業機械、燃料電池システムおよび燃料電池システムを制御するための方法
2日前
株式会社小松製作所
ワイヤソーの状態監視システム、ワイヤソー、及びワイヤソーの状態監視方法
16日前
株式会社小松製作所
解析装置、解析方法、プログラム、学習済み機械学習モデル、および、機械学習方法
14日前
株式会社小松製作所
オフセット角度較正方法、姿勢検出方法、オフセット角度較正システム、及び姿勢検出システム
2日前
株式会社小松製作所
作業機械の制御システム、作業機械及び作業機械の制御方法
24日前
個人
インプラント杭
23日前
戸田建設株式会社
覆土材
7日前
戸田建設株式会社
緑化覆土材
7日前
株式会社大林組
作業機械
3日前
株式会社大林組
人工地盤構造
16日前
株式会社竹中工務店
建物の基礎構造
1日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ