TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087189
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201670
出願日
2023-11-29
発明の名称
表示制御システム、表示制御方法および遠隔操作システム
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/26 20060101AFI20250603BHJP(水工;基礎;土砂の移送)
要約
【課題】斜面についての情報を補足することができる表示制御システム、表示制御方法および遠隔操作システムを提供する。
【解決手段】表示制御システムは、表示装置の表示制御システムであって、作業機械で計測された計測情報を取得する取得部と、前記作業機械の側面画像を含む合成画像を前記表示装置に表示する表示部と、を備え、前記表示部は、前記計測情報に基づいて、前記作業機械の前方の傾斜を表す斜面画像を前記合成画像に含ませる。
【選択図】図7
特許請求の範囲
【請求項1】
表示装置の表示制御システムであって、
作業機械で計測された計測情報を取得する取得部と、
前記作業機械の側面画像を含む合成画像を前記表示装置に表示する表示部と、
を備え、
前記表示部は、前記計測情報に基づいて、前記作業機械の前方の傾斜を表す斜面画像を前記合成画像に含ませる
表示制御システム。
続きを表示(約 1,000 文字)
【請求項2】
前記斜面画像は、作業機械の前方の斜面を表す
請求項1に記載の表示制御システム。
【請求項3】
前記合成画像に、前記傾斜の傾斜角を表す傾斜角画像を含む
請求項1に記載の表示制御システム。
【請求項4】
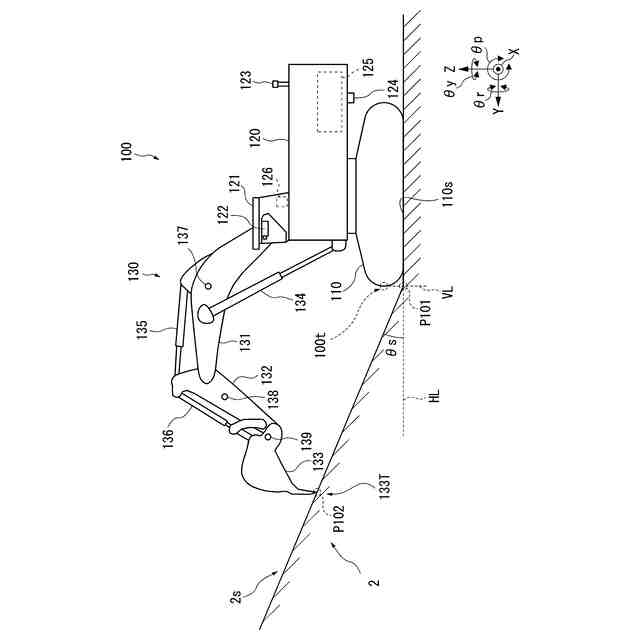
前記作業機械は、走行体と作業機とを備え、
前記計測情報は、前記作業機の姿勢を表す姿勢情報を含み、
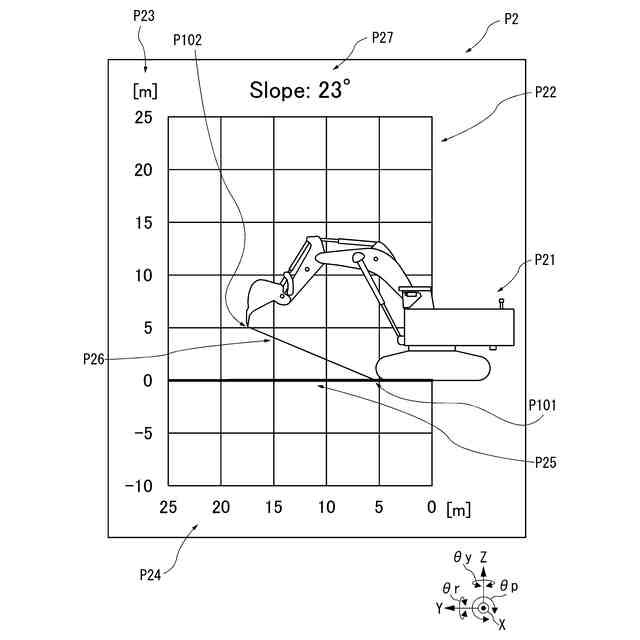
前記斜面画像は、前記走行体を基準とした第1位置と前記姿勢情報に基づく前記作業機を基準とした第2位置とを結ぶ画像を含む
請求項1に記載の表示制御システム。
【請求項5】
前記姿勢情報に基づいて、前記側面画像を表示する
請求項4に記載の表示制御システム。
【請求項6】
前記作業機は、バケットを備え、
前記第2位置は、バケットの所定位置である
請求項4に記載の表示制御システム。
【請求項7】
前記第1位置は、前記走行体の先端から下ろした垂直線が、前記走行体の接地面に交差する点である
前記請求項4または6に記載の表示制御システム。
【請求項8】
前記作業機械は、撮像装置を備え、
前記撮像装置が撮像した撮像画像に前記合成画像を重畳させて前記表示装置に表示する
請求項7に記載の表示制御システム。
【請求項9】
撮像装置を備える作業機械で計測された計測情報を取得する取得部と、前記撮像装置が撮像した撮像画像に前記作業機械の側面画像を含む合成画像を重畳させて前記作業機械の遠隔地に設けられた表示装置に表示する表示部と、を備え、前記表示部が、前記計測情報に基づいて、前記作業機械の前方の傾斜を表す斜面画像を前記合成画像に含ませる、表示制御システムと、
前記表示装置と、
前記遠隔地に設けられた前記作業機械の操作装置と、
を備える遠隔操作システム。
【請求項10】
表示装置の表示制御方法であって、
作業機械の側面画像を含む合成画像を前記表示装置に表示するステップと、
前記作業機械で計測された計測情報を取得するステップと、
前記計測情報に基づいて、前記作業機械の前方の傾斜を表す斜面画像を前記合成画像に含ませるステップと、
を含む表示制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、表示制御システム、表示制御方法および遠隔操作システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、作業車両(以下、作業機械という)を遠隔操作するための遠隔運転室の表示装置を制御する表示制御システムが記載されている。特許文献1に記載されている表示制御システムでは、表示装置に、作業機械に乗っているときに得られる感覚の欠乏を補足するための画像である補足画像が表示される。ここで、補足画像は、例えば、作業機の現在の姿勢を表す作業機械の側面を描く画像を含む姿勢画像である。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/090985号
【発明の概要】
【発明が解決しようとする課題】
【0004】
遠隔操作システムを用いて作業機械を走行する際、安全に走行可能な斜面であるか否かを判断する必要がある。遠隔操作システムはカメラ映像上、奥行感が乏しく、斜面の斜度をオペレータが認識することが困難となる場合がある。また、有人の作業機械において、操作に不慣れなオペレータでも同様の問題がある。これに対し、特許文献1に記載の装置では、高さ方向の情報や移動しようとする斜面についての情報が不足するという課題があった。
【0005】
本開示は、上記課題を解決するため、斜面についての情報を補足することができる表示制御システム、表示制御方法および遠隔操作システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の表示制御システムは、表示装置の表示制御システムであって、作業機械で計測された計測情報を取得する取得部と、前記作業機械の側面画像を含む合成画像を前記表示装置に表示する表示部と、を備え、前記表示部は、前記計測情報に基づいて、前記作業機械の前方の傾斜を表す斜面画像を前記合成画像に含ませる。
【0007】
本開示の表示制御方法は、表示装置の表示制御方法であって、作業機械の側面画像を含む合成画像を前記表示装置に表示するステップと、前記作業機械で計測された計測情報を取得するステップと、前記計測情報に基づいて、前記作業機械の前方の傾斜を表す斜面画像を前記合成画像に含ませるステップと、を含む。
【0008】
本開示の遠隔操作システムは、撮像装置を備える作業機械で計測された計測情報を取得する取得部と、前記撮像装置が撮像した撮像画像に前記作業機械の側面画像を含む合成画像を重畳させて前記作業機械の遠隔地に設けられた表示装置に表示する表示部と、を備え、前記表示部が、前記計測情報に基づいて、前記作業機械の前方の傾斜を表す斜面画像を前記合成画像に含ませる、表示制御システムと、前記表示装置と、前記遠隔地に設けられた前記作業機械の操作装置と、を備える。
【発明の効果】
【0009】
本開示の表示制御システム、表示制御方法および遠隔操作システムによれば、合成画像によって斜面についての情報を補足することができる。
【図面の簡単な説明】
【0010】
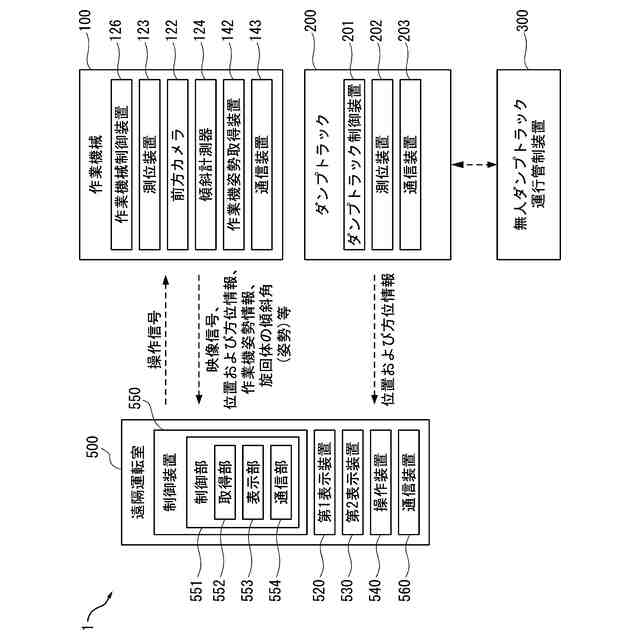
本開示の実施形態に係る遠隔操作システムの構成例を示す概略図である。
本開示の実施形態に係る作業機械の外観図である。
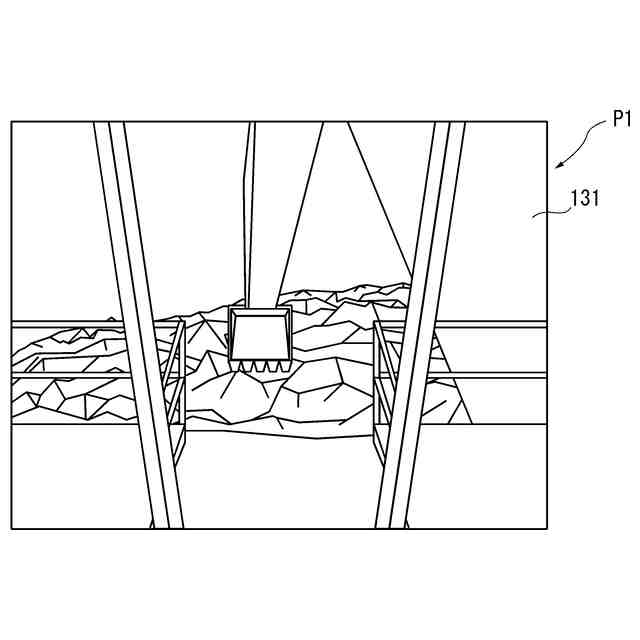
本開示の実施形態に係る作業機械の撮像装置が撮像した撮像画像の例を示す模式図である。
本開示の実施形態に係る遠隔操作システムの構成例を示す概略ブロック図である
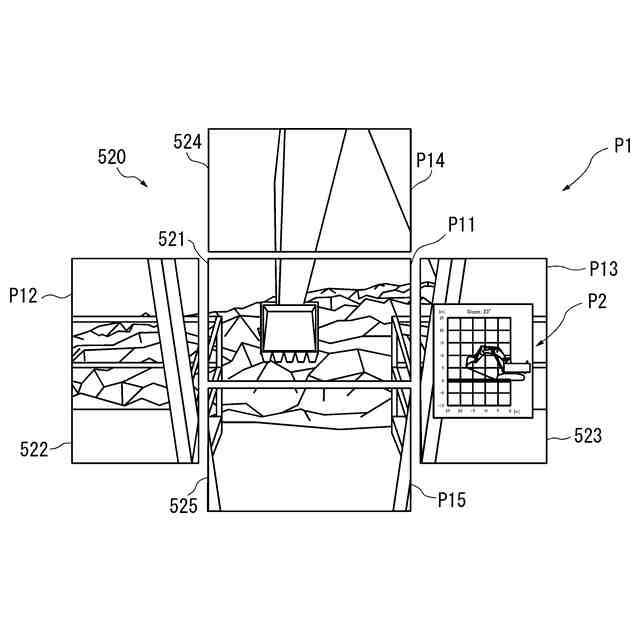
本開示の実施形態に係る撮像画像から切り出される画像の例を示す模式図である。
本開示の実施形態に係る表示装置が表示する画像の例を示す模式図である。
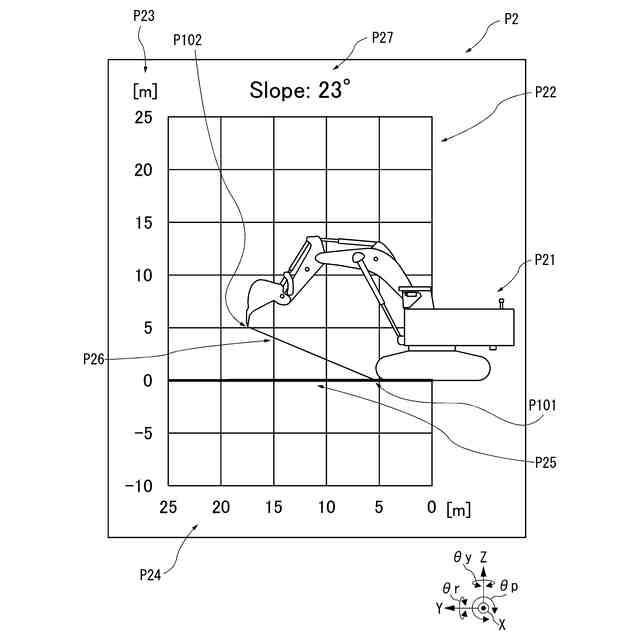
本開示の実施形態に係る合成画像の例を示す模式図である。
本開示の実施形態に係る合成画像を説明するための模式図である。
本開示の実施形態に係る合成画像の例を示す模式図である。
本開示の実施形態に係る合成画像を説明するための模式図である。
本開示の実施形態に係る合成画像の例を示す模式図である。
本開示の実施形態に係る合成画像の例を示す模式図である。
本開示の実施形態に係る合成画像の例を示す模式図である。
本開示の実施形態に係る遠隔操作システムの動作例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る




 特許ウォッチ
特許ウォッチ