TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088504
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023203241
出願日
2023-11-30
発明の名称
オフセット角度較正方法、姿勢検出方法、オフセット角度較正システム、及び姿勢検出システム
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
3/43 20060101AFI20250604BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機のオフセット角度の測定誤差を抑制すること。
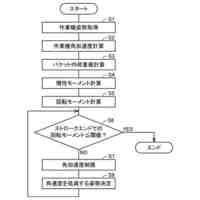
【解決手段】作業機械の作業機のオフセット角度を較正するオフセット角度較正方法は、作業機を所定の姿勢に固定した状態で左右方向へのオフセットのみを行った複数のオフセット姿勢で、計測装置を用いて作業機の所定位置の位置情報を取得する位置情報取得ステップと、位置情報に基づいて、各々のオフセット姿勢における第1オフセット角度を算出する第1オフセット角度算出ステップと、作業機械に搭載され、作業機のオフセット角度を検出する角度センサによる複数のオフセット姿勢での検出値に基づいて、各々のオフセット姿勢における第2オフセット角度を取得する較正用第2オフセット角度取得ステップと、複数のオフセット姿勢における第1オフセット角度と第2オフセット角度とに基づいて、角度センサの測定誤差を算出する誤差算出ステップと、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
作業機械の作業機のオフセット角度を較正するオフセット角度較正方法であって、
前記作業機を所定の姿勢に固定した状態で左右方向へのオフセットのみを行った複数のオフセット姿勢で、計測装置を用いて前記作業機の所定位置の位置情報を取得する位置情報取得ステップと、
前記位置情報に基づいて、各々の前記オフセット姿勢における第1オフセット角度を算出する第1オフセット角度算出ステップと、
前記作業機械に搭載され、前記作業機のオフセット角度を検出する角度センサによる複数の前記オフセット姿勢での検出値に基づいて、各々の前記オフセット姿勢における第2オフセット角度を取得する較正用第2オフセット角度取得ステップと、
複数の前記オフセット姿勢における前記第1オフセット角度と前記第2オフセット角度とに基づいて、前記角度センサの測定誤差を算出する誤差算出ステップと、を備える、
オフセット角度較正方法。
続きを表示(約 1,800 文字)
【請求項2】
前記第1オフセット角度算出ステップは、
前記複数のオフセット姿勢における前記作業機の前記所定位置の位置情報に基づいて、複数の前記所定位置からの距離が最小となる平面を算出する平面算出ステップと、
複数の前記所定位置を前記平面に投影した複数の投影位置の座標を前記計測装置の座標系から前記平面の座標系に変換する座標変換ステップと、
前記平面の座標系において、複数の前記投影位置との誤差が最小となる前記平面における円を算出する円算出ステップと、
各々の前記投影位置の前記円における回転角度を算出し、前記回転角度を前記投影位置に対応する前記オフセット姿勢における前記第1オフセット角度とする角度算出ステップと、を有する、
請求項1に記載のオフセット角度較正方法。
【請求項3】
作業機械の作業機の姿勢を検出する姿勢検出方法であって、
前記作業機械に搭載され、前記作業機のオフセット角度を検出する角度センサの検出値に基づいて第2オフセット角度を取得する第2オフセット角度取得ステップと、
請求項1に記載のオフセット角度較正方法の前記第2オフセット角度に基づいて、誤差補正後の第2オフセット角度を検出する補正後第2オフセット角度検出ステップと、
検出した前記誤差補正後の第2オフセット角度を用いて前記作業機の姿勢を検出する姿勢検出ステップと、を備える、
姿勢検出方法。
【請求項4】
前記作業機械は、前記作業機が左右方向にオフセット可能に取り付けられる作業機械本体を有し、
前記第2オフセット角度取得ステップにおいて、前記角度センサは、前記作業機械本体に対する前記作業機のオフセット角度を検出する、
請求項3に記載の姿勢検出方法。
【請求項5】
前記作業機は、
前記作業機械本体に上下方向に回転可能に取り付けられるブームと、
前記ブームの先端に回転可能に取り付けられるアームと、
前記アームの先端に回転可能に取り付けられるバケットと、を有し、
前記姿勢検出ステップは、前記バケットの刃先位置を検出する、
請求項4に記載の姿勢検出方法。
【請求項6】
作業機械の作業機のオフセット角度を較正するオフセット角度較正システムであって、
前記作業機を所定の姿勢に固定した状態で左右方向へのオフセットのみを行った複数のオフセット姿勢で、前記作業機の所定位置の位置情報を計測する計測装置と、
前記作業機械に搭載され、前記作業機のオフセット角度を検出する角度センサと、
前記位置情報に基づいて、各々の前記オフセット姿勢における第1オフセット角度を算出し、前記角度センサによる複数の前記オフセット姿勢での検出値に基づいて、各々の前記オフセット姿勢における第2オフセット角度を取得し、複数の前記オフセット姿勢における前記第1オフセット角度と前記第2オフセット角度とに基づいて相関テーブルを作成するコントローラと、を備える、
オフセット角度較正システム。
【請求項7】
作業機械の作業機の姿勢を検出する姿勢検出システムであって、
前記作業機械に搭載され、前記作業機のオフセット角度を検出する角度センサと、
請求項6に記載のオフセット角度較正システムの前記相関テーブルを記憶する記憶部と、
前記角度センサで検出した前記オフセット角度を前記相関テーブルに基づいて補正し、補正後のオフセット角度を用いて、前記作業機の姿勢を検出するコントローラと、を備える、
姿勢検出システム。
【請求項8】
前記作業機械は、前記作業機が左右方向にオフセット可能に取り付けられる作業機械本体を有し、
前記角度センサは、前記作業機械本体に対する前記作業機のオフセット角度を検出する、
請求項7に記載の姿勢検出システム。
【請求項9】
前記作業機は、
前記作業機械本体に上下方向に回転可能に取り付けられるブームと、
前記ブームの先端に回転可能に取り付けられるアームと、
前記アームの先端に回転可能に取り付けられるバケットと、を有し、
前記コントローラは、前記バケットの刃先位置を検出する、
請求項8に記載の姿勢検出システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、オフセット角度較正方法、姿勢検出方法、オフセット角度較正システム、及び姿勢検出システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、特許文献1に開示されているような、オフセット式ブーム及びオフセット角度を検出する角度センサを備える油圧ショベルが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2000-170217号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば角度センサの取り付け誤差に起因してオフセット角度の測定誤差が生じる可能性がある。
【0005】
本開示は、作業機のオフセット角度の測定誤差を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、作業機械の作業機のオフセット角度を較正するオフセット角度較正方法であって、作業機を所定の姿勢に固定した状態で左右方向へのオフセットのみを行った複数のオフセット姿勢で、計測装置を用いて作業機の所定位置の位置情報を取得する位置情報取得ステップと、位置情報に基づいて、各々のオフセット姿勢における第1オフセット角度を算出する第1オフセット角度算出ステップと、作業機械に搭載され、作業機のオフセット角度を検出する角度センサによる複数のオフセット姿勢での検出値に基づいて、各々のオフセット姿勢における第2オフセット角度を取得する較正用第2オフセット角度取得ステップと、複数のオフセット姿勢における第1オフセット角度と第2オフセット角度とに基づいて、角度センサの測定誤差を算出する誤差算出ステップと、を備える、オフセット角度較正方法が提供される。
【発明の効果】
【0007】
本開示によれば、作業機のオフセット角度の測定誤差が抑制される。
【図面の簡単な説明】
【0008】
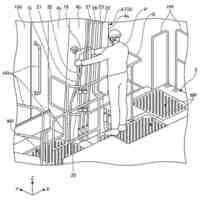
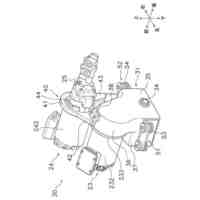
図1は、実施形態に係る作業機械を示す斜視図である。
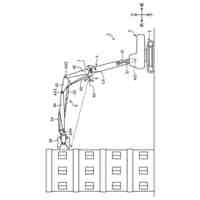
図2は、実施形態に係る作業機械を示す側面図である。
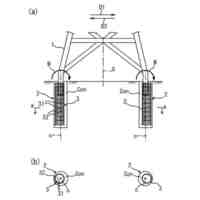
図3は、実施形態に係る作業機械を示す正面図である。
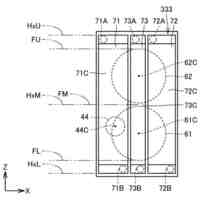
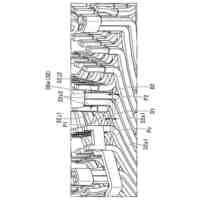
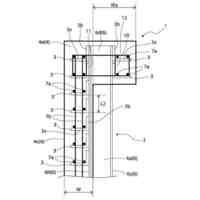
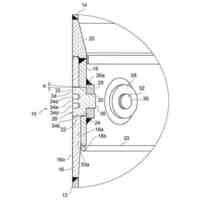
図4は、実施形態に係る第1ブームと第2ブームとの連結構造を示す図である。
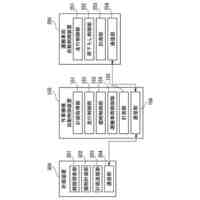
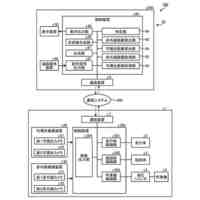
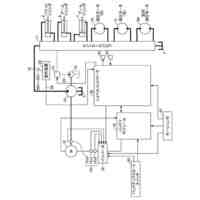
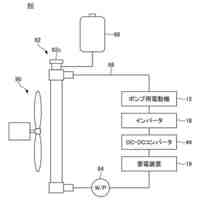
図5は、実施形態に係る作業機械の駆動システム及び駆動制御システムを示すブロック図である。
図6は、実施形態に係る姿勢検出システムを示すブロック図である。
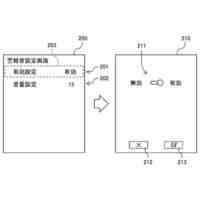
図7は、実施形態に係る表示入力装置に表示されるガイド画面を示す図である。
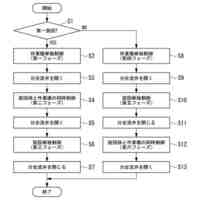
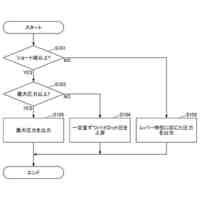
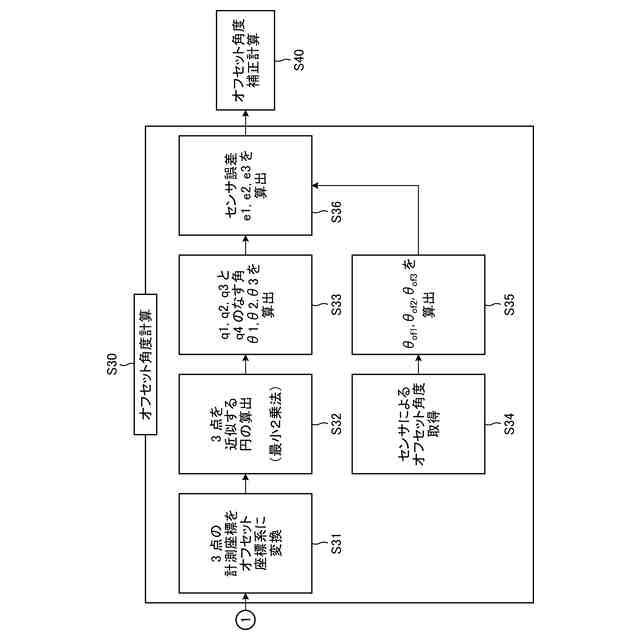
図8は、実施形態に係るオフセット角度較正方法を示すフロー図である。
図9は、実施形態に係るオフセット角度較正方法を示すフロー図である。
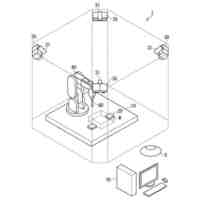
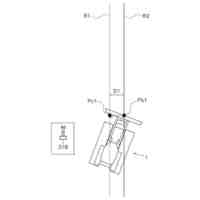
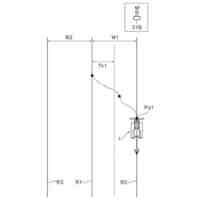
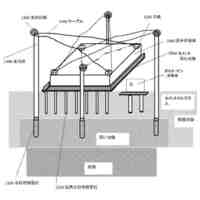
図10は、実施形態に係る作業機を複数のオフセット姿勢に移動させてトータルステーションでブームトップの座標を計測している状態を示す平面図である。
図11は、実施形態に係るオフセット角度較正の際の表示入力装置の表示画面を示す図である。
図12は、実施形態に係るオフセット角度較正方法を説明するための図である。
図13は、実施形態に係るオフセット角度較正方法を説明するための図である。
図14は、実施形態に係るオフセット角度較正方法を説明するための図である。
図15は、実施形態に係るオフセット角度較正方法を説明するための図である。
図16は、実施形態に係るオフセット角度較正方法で作成されたオフセット角度誤差テーブルを示す図である。
図17は、実施形態に係るパラメータを較正するときの作業機械を示す側面図である。
図18は、実施形態に係る作業機械を模式的に示す側面図である。
図19は、実施形態に係る作業機械を模式的に示す平面図である。
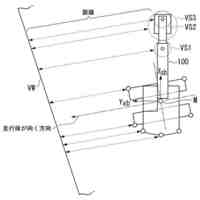
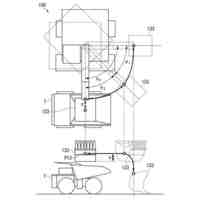
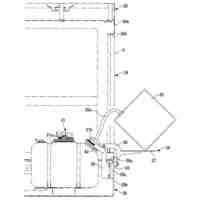
図20は、実施形態に係るパラメータの較正のためにトータルステーションがプリズムを計測するときの作業機械の姿勢を模式的に示す側面図である。
図21は、実施形態に係るパラメータの較正のためにトータルステーションがプリズムを計測するときの作業機械の姿勢を模式的に示す側面図である。
図22は、実施形態に係るパラメータの較正のためにトータルステーションがプリズムを計測するときの作業機械の姿勢を模式的に示す側面図である。
図23は、実施形態に係るパラメータの較正のためにトータルステーションがプリズムを計測するときの作業機械の姿勢を模式的に示す側面図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
実施形態においては、「左」、「右」、「前」、「後」、「上」、及び「下」の用語を用いて各部の位置関係について説明する。これらの用語は、作業機械の中心を基準とした相対位置又は方向を示す。左右方向と前後方向と上下方向とは直交する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
作業機械
12日前
株式会社小松製作所
作業機械
19日前
株式会社小松製作所
制御システムおよび作業機械
11日前
株式会社小松製作所
ステータ、回転電機及び作業機械
11日前
株式会社小松製作所
システム、方法およびプログラム
11日前
株式会社小松製作所
作業機械および作業機械の制御方法
13日前
株式会社小松製作所
作業機械、散水装置、及び散水システム
13日前
株式会社小松製作所
計画装置、作業機械、運搬車両および計画方法
12日前
株式会社小松製作所
加工機械、加工機械の制御装置および加工機械の制御方法
12日前
株式会社小松製作所
作業機械の遠隔操作システム及び作業機械の遠隔操作方法
12日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
12日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
12日前
株式会社小松製作所
作業機械、及び、作業機械用の電動パワートレインユニット
11日前
株式会社小松製作所
表示システム及び表示方法
20日前
株式会社小松製作所
積込機械の制御装置及び制御方法
4日前
個人
耐震原子炉設備
21日前
FKS株式会社
擁壁
26日前
株式会社forch
土採取装置
27日前
鹿島建設株式会社
基礎構造
20日前
株式会社クボタ
作業車
12日前
株式会社竹中工務店
建築方法
18日前
株式会社富田製作所
継手部構造
20日前
住友建機株式会社
ショベル
12日前
住友建機株式会社
ショベル
19日前
住友建機株式会社
ショベル
25日前
住友建機株式会社
ショベル
25日前
住友建機株式会社
ショベル
25日前
住友建機株式会社
ショベル
12日前
住友建機株式会社
作業機械
11日前
住友建機株式会社
作業機械
13日前
住友建機株式会社
ショベル
12日前
住友建機株式会社
ショベル
11日前
株式会社クボタ
作業車両
18日前
日本車輌製造株式会社
建設機械
11日前
株式会社クボタ
作業機
20日前
日立建機株式会社
建設機械
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ