TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088389
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023203067
出願日
2023-11-30
発明の名称
処理装置、プログラム、および測距システム
出願人
株式会社リコー
代理人
個人
,
個人
主分類
G01S
17/894 20200101AFI20250604BHJP(測定;試験)
要約
【課題】測距精度を向上させること。
【解決手段】処理装置は、互いに位相差を有する複数の位相の各々についての、複数のタップを有する受光部から得られた、複数のタップの各々の電荷量に基づいて、対象物までの距離を算出する測距演算処理部を備え、測距演算処理部は、複数の位相の各々についての、複数のタップの各々の電荷量の和に基づいて、対象物までの距離を算出する。
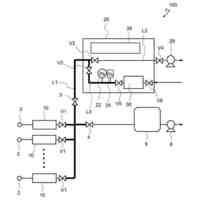
【選択図】図2
特許請求の範囲
【請求項1】
互いに位相差を有する複数の位相の各々についての、複数のタップを有する受光部から得られた、前記複数のタップの各々の電荷量に基づいて、対象物までの距離を算出する測距演算処理部
を備え、
前記測距演算処理部は、
前記複数の位相の各々についての、前記複数のタップの各々の前記電荷量の和に基づいて、前記対象物までの距離を算出する
処理装置。
続きを表示(約 1,400 文字)
【請求項2】
互いに位相差を有する複数の位相の各々についての、複数のタップを有する受光部から得られた、前記複数のタップの各々の電荷量に基づいて、対象物までの距離を算出する測距演算処理部と、
前記測距演算処理部による前記距離の算出に用いられる、前記複数の位相の各々についての、前記複数のタップの各々の前記電荷量の和に比例するパラメータの補正値を算出する補正値算出部とを備える
処理装置。
【請求項3】
前記補正値算出部は、
温度センサによって取得された前記受光部の温度に基づいて、前記受光部のゲインの補正値を、前記パラメータの補正値として算出する
請求項2に記載の処理装置。
【請求項4】
前記補正値算出部は、
照度センサによって取得された外光の照度に基づいて、発光部から照射される照射光の光量の補正値を、前記パラメータの補正値として算出する
請求項2に記載の処理装置。
【請求項5】
前記補正値算出部は、
温度センサによって取得された発光部の温度に基づいて、前記発光部から照射される照射光の光量の補正値を、前記パラメータの補正値として算出する
請求項2に記載の処理装置。
【請求項6】
前記補正値算出部は、
温度センサによって取得された前記受光部の温度に基づいて、前記パラメータの補正を行うか否かを切り替える
請求項2に記載の処理装置。
【請求項7】
前記測距演算処理部は、
前記複数の位相の各々についての、前記複数のタップの各々の前記電荷量の和と、前記受光部によって受光された外光のタップ値とに基づいて、前記対象物までの距離を算出する
請求項1に記載の処理装置。
【請求項8】
前記測距演算処理部は、
所定フレーム毎に、前記複数のタップの各々の前記電荷量の和の変動量を記憶し、前記和の変動量が記憶されているフレームの前記和の変動量に基づいて、前記和が記憶されていないフレームの前記和の変量を推定する
請求項1に記載の処理装置。
【請求項9】
コンピュータを
互いに位相差を有する複数の位相の各々についての、複数のタップを有する受光部から得られた、前記複数のタップの各々の電荷量に基づいて、対象物までの距離を算出する測距演算処理部
として機能させるプログラムであって、
前記測距演算処理部は、
前記複数の位相の各々についての、前記複数のタップの各々の前記電荷量の和に基づいて、前記対象物までの距離を算出する
プログラム。
【請求項10】
コンピュータを
互いに位相差を有する複数の位相の各々についての、複数のタップを有する受光部から得られた、前記複数のタップの各々の電荷量に基づいて、対象物までの距離を算出する測距演算処理部、および、
前記測距演算処理部による前記距離の算出に用いられる、前記複数の位相の各々についての、前記複数のタップの各々の前記電荷量の和に比例するパラメータの補正値を算出する補正値算出部
として機能させるプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、処理装置、プログラム、および測距システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、撮像装置から対象物までの距離を測距する技術として、ToF(Time of Flight)方式が知られている。ToF方式の一つとして、周期的にレーザーパルスを照射し、対象物で反射された反射光を蓄積して、発光との位相差に基づいて対象物までの距離を算出する間接ToF方式が知られている(下記特許文献1参照)。
【0003】
間接ToF方式では、複数の位相(例えば0°,90°,180°,270°)の各々において、照射光を発光および受光するタイミングであるインテグレーションタイムで、光源およびToFセンサの消費電力が高くなる。また、間接ToF方式では、長距離や広画角で高い測距性能を確保するために、インテグレーションタイムを長くして受光量を大きくすることでS/Nを大きくすることが可能である。
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術は、所定の位相差の2通りの照射光を物体に照射して、前記物体で反射した反射光を受光することにより発生する電荷が、前記物体までの距離に応じて第1のタップと第2のタップとに振り分けられ、2通りの前記照射光について2つずつ検出される所定数の検出信号を用いて、前記第1のタップと前記第2のタップとの特性のズレを補正する補正パラメータを算出する方法を用いている。
【0005】
上述したように、間接ToF方式では、長距離や広画角で高い測距性能を確保するために、インテグレーションタイムを長くしてS/Nを大きくすることが重要であり、インテグレーションタイムを確保しつつ高い精度で測距することが求められている。
【0006】
本発明は、このような状況に鑑みてなされたものであり、測距精度を向上させることを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、一実施形態に係る処理装置は、互いに位相差を有する複数の位相の各々についての、複数のタップを有する受光部から得られた、複数のタップの各々の電荷量に基づいて、対象物までの距離を算出する測距演算処理部を備え、測距演算処理部は、複数の位相の各々についての、複数のタップの各々の電荷量の和に基づいて、対象物までの距離を算出する。
【発明の効果】
【0008】
一実施形態に係る処理装置によれば、測距精度を向上させることができる。
【図面の簡単な説明】
【0009】
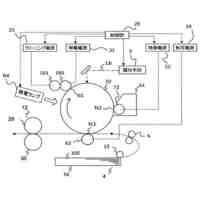
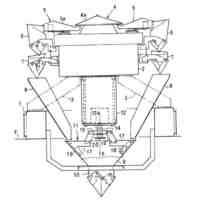
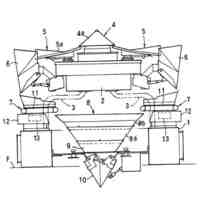
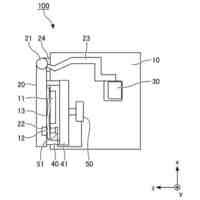
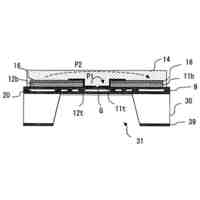
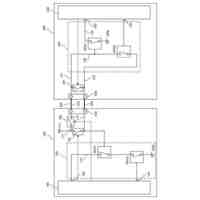
一実施形態に係る測距モジュール11の構成を示す図。
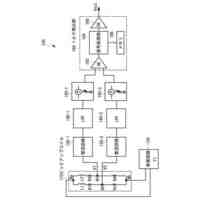
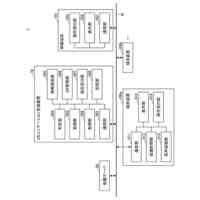
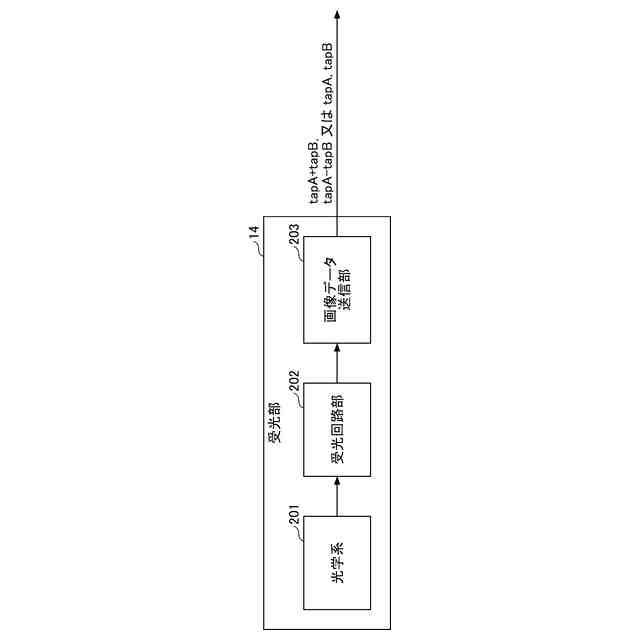
一実施形態に係る測距システムが備える受光部の機能構成例(第1例~第3例)を示す図。
一実施形態に係る測距システムが備える受光部が送信する画像データの一例(第1例~第3例)を示す図。
一実施形態に係る測距システムが備える受光部が送信する画像データの一例(第4例)を示す図。
一実施形態に係る測距システムが備える受光部の機能構成例(第2例)を示す図。
一実施形態に係る測距システムが備える受光部の機能構成例(第3例)を示す図。
一実施形態に係る測距システムが備える受光部の機能構成例(第4例)を示す図。
一実施形態に係る一実施形態に係る測距システムにおけるフレームの構成例を示す図。
一実施形態に係る測距システムが備える受光部の機能構成例(第5例)を示す図。
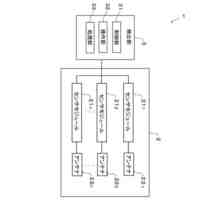
一実施形態に係る測距システムが備える発光部の機能構成例(第1例)を示す図。
一実施形態に係る測距システムが備える発光部の機能構成例(第2例)を示す図。
一実施形態に係る測距システムが備える発光部の光源のIL特性の一例を示す図。
一実施形態に係る測距システムにおけるフレームの構成例(第2例)を示す図。
一実施形態に係る測距システムが備える発光部の機能構成例(第3例)を示す図。
図14に示す発光部の構成例を示す図。
一実施形態に係る測距システムにおけるフレームの構成例(第3例)を示す図。
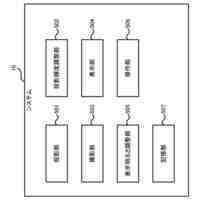
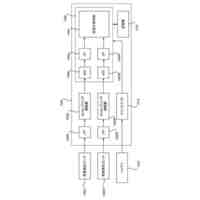
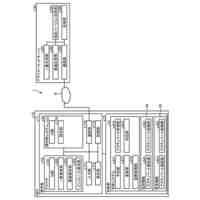
一実施形態に係る測距モジュールの処理部および情報処理装置の処理部のハードウェア構成図。
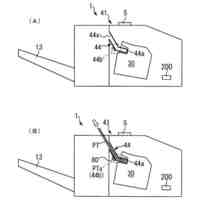
本開示の別の一実施形態に係る測距システムを携帯情報端末に適用した例を示す図。
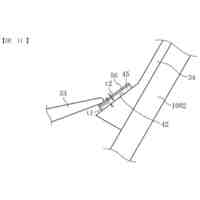
本開示の別の一実施形態に係る測距システムを移動体の自律走行システムに適用した例を示す図。
【発明を実施するための形態】
【0010】
以下、図面を参照して、一実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
画像形成装置
今日
株式会社リコー
システムおよび方法
1日前
株式会社リコー
定着装置及び画像形成装置
今日
株式会社リコー
定着装置及び画像形成装置
1日前
株式会社リコー
後処理装置、及び、画像形成システム
今日
株式会社リコー
圧切替機構、画像形成装置及び圧切替方法
1日前
株式会社リコー
電子機器、システム、画像形成装置、異常検出方法
1日前
株式会社リコー
足踏み検知装置、情報処理システム、足踏み検知方法および動画再生方法
今日
株式会社リコー
情報処理装置、情報処理システム、情報処理方法、印刷媒体、及びプログラム
今日
株式会社リコー
歩行検知装置、情報処理システム、情報処理装置、歩行支援ロボット、方法およびプログラム
1日前
株式会社リコー
情報処理システム、サーバおよびプログラム
5日前
株式会社リコー
電子機器、情報処理システム、情報処理方法およびプログラム
5日前
株式会社リコー
コミュニケーション支援システム、コミュニケーション支援装置、コミュニケーション支援方法、及びプログラム
今日
日本精機株式会社
計器装置
5日前
株式会社東光高岳
計器
1日前
日本精機株式会社
液面検出装置
7日前
大和製衡株式会社
組合せ秤
7日前
大和製衡株式会社
組合せ秤
7日前
大和製衡株式会社
組合せ秤
13日前
有限会社原製作所
検出回路
27日前
日本無線株式会社
レーダ装置
28日前
株式会社リコー
光学機器
27日前
個人
フロートレス液面センサー
20日前
日本特殊陶業株式会社
ガスセンサ
8日前
日本特殊陶業株式会社
ガスセンサ
8日前
日本特殊陶業株式会社
ガスセンサ
19日前
ダイハツ工業株式会社
試験用治具
13日前
キヤノン株式会社
放射線撮像装置
22日前
株式会社クボタ
作業車
12日前
大同特殊鋼株式会社
座標系較正方法
22日前
富士電機株式会社
エンコーダ
今日
富士電機株式会社
エンコーダ
今日
株式会社フジキン
流量測定装置
14日前
トヨタ自動車株式会社
歯車の検査方法
8日前
旭光電機株式会社
漏出検出装置
19日前
株式会社ノーリツ
通信システム
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ