TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085899
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2023199594
出願日
2023-11-27
発明の名称
移動体の制振システムおよび移動体の制振方法
出願人
株式会社豊田自動織機
代理人
弁理士法人深見特許事務所
主分類
B65G
1/04 20060101AFI20250530BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】移動体において発生する振動を軽減する。
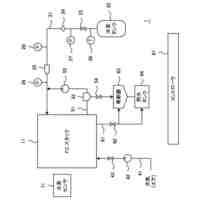
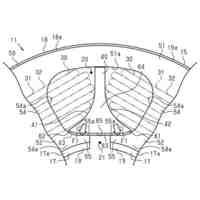
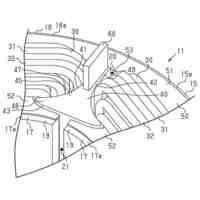
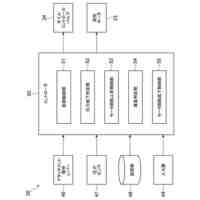
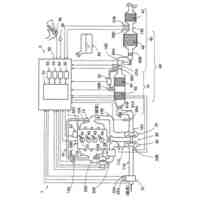
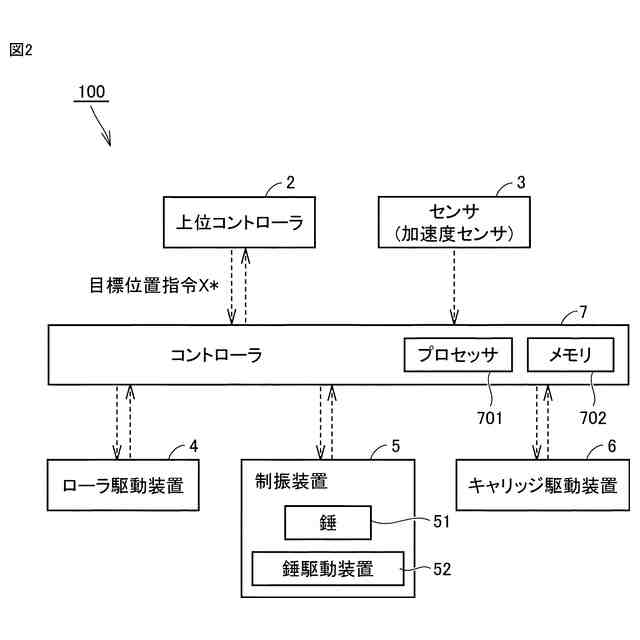
【解決手段】クレーン本体1の制振システム100は、制御対象のマスト14が固定されたクレーン本体1と、ローラ駆動装置4と、錘駆動装置52と、センサ3と、コントローラ7とを備える。ローラ駆動装置4は、クレーン本体1を目標位置指令に従ってX方向に移動させる。錘駆動装置52は、マスト14に設置された錘51をY方向に駆動する。センサ3は、少なくともY方向におけるマスト14の振動または変形を検出する。コントローラ7は、マスト14が制振されるように目標位置指令に応じてローラ駆動装置4を制御し、ローラ駆動装置4によるマスト14の制振中に、マスト14が制振されるように、センサ3により検出された振動または変形に基づいて錘駆動装置52を制御する。
【選択図】図2
特許請求の範囲
【請求項1】
制振対象の構造体が固定された移動体と、
前記移動体を移動指令に従って第1方向に移動させる第1の駆動装置と、
前記構造体に設置された錘を第2方向に駆動する第2の駆動装置と、
少なくとも前記第2方向における前記構造体の振動または変形を検出するセンサと、
前記第1および第2の駆動装置を制御する制御装置とを備え、
前記制御装置は、
前記構造体が制振されるように、前記移動指令に応じて前記第1の駆動装置を制御し、
前記第1の駆動装置による前記構造体の制振中に、前記構造体がさらに制振されるように、前記センサにより検出された振動または変形に基づいて前記第2の駆動装置を制御する、移動体の制振システム。
続きを表示(約 1,200 文字)
【請求項2】
前記制御装置は、前記第1の駆動装置による前記構造体の制振中に、前記センサにより検出された振動または変形が打ち消されるように、前記第2の駆動装置を制御する、請求項1に記載の移動体の制振システム。
【請求項3】
前記第2方向は、前記第1方向と交差する方向であり、
前記センサは、前記第2方向における前記構造体の1次モードの振動または変形を検出し、
前記制御装置は、前記1次モードの振動または変形が打ち消されるように、前記第2の駆動装置を制御する、請求項2に記載の移動体の制振システム。
【請求項4】
前記1次モードの振動または変形は、前記第2方向における前記構造体の振動、前記第2方向における前記構造体の曲げ、および、前記構造体のねじれのうちの少なくとも1つを含む、請求項3に記載の移動体の制振システム。
【請求項5】
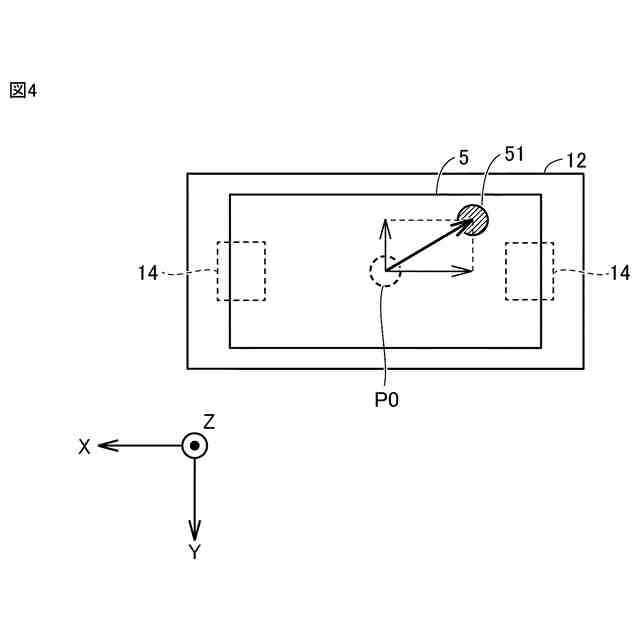
前記制御装置は、前記第1の駆動装置による前記構造体の制振中に、前記第1方向および前記第2方向を含む平面内で前記錘を2次元的に駆動するように、前記第2の駆動装置を制御する、請求項3または4に記載の移動体の制振システム。
【請求項6】
前記制御装置は、前記第1の駆動装置による前記構造体の制振では除去されなかった前記構造体の振動または変形が軽減されるように、前記第2の駆動装置を制御する、請求項1~4のいずれか1項に記載の移動体の制振システム。
【請求項7】
前記制御装置は、
前記錘が基準位置から駆動を開始するように前記第2の駆動装置を制御し、
前記錘による前記構造体の制振制御の指令値と、前記錘を前記基準位置に戻す位置制御の指令値とを加算する、請求項1~4のいずれか1項に記載の移動体の制振システム。
【請求項8】
前記センサは、前記構造体の加速度を検出する加速度センサ、前記構造体の角速度を検出するジャイロセンサ、前記構造体の速度を検出する速度センサ、前記構造体の歪みを検出する歪みセンサ、または、前記移動体と前記移動体の外部に配置された基準点との間の距離を検出する距離センサである、請求項1~4のいずれか1項に記載の移動体の制振システム。
【請求項9】
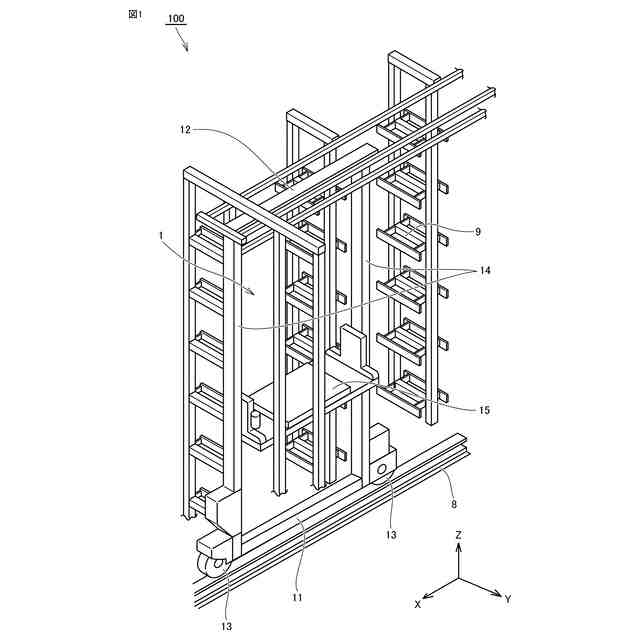
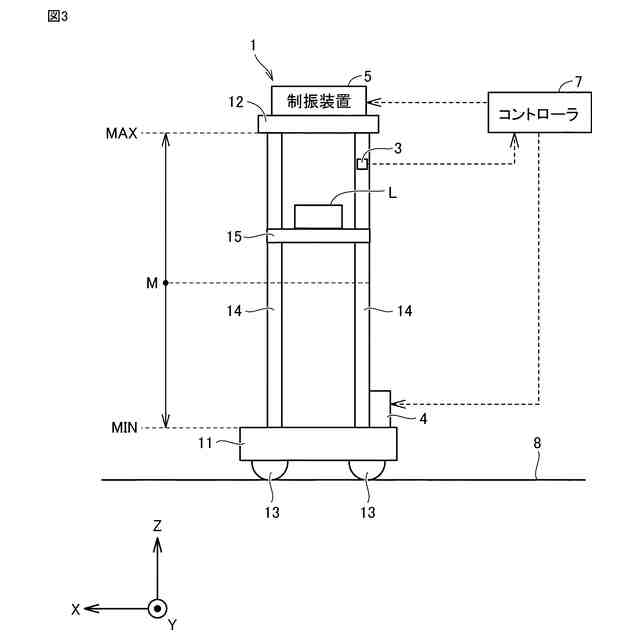
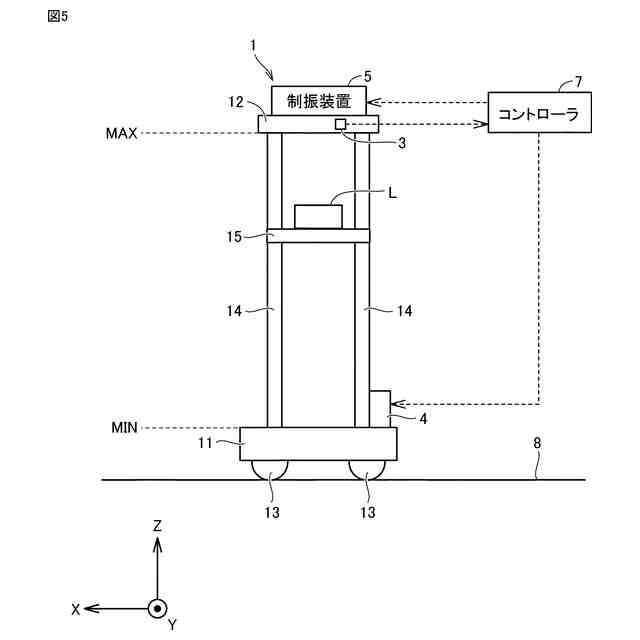
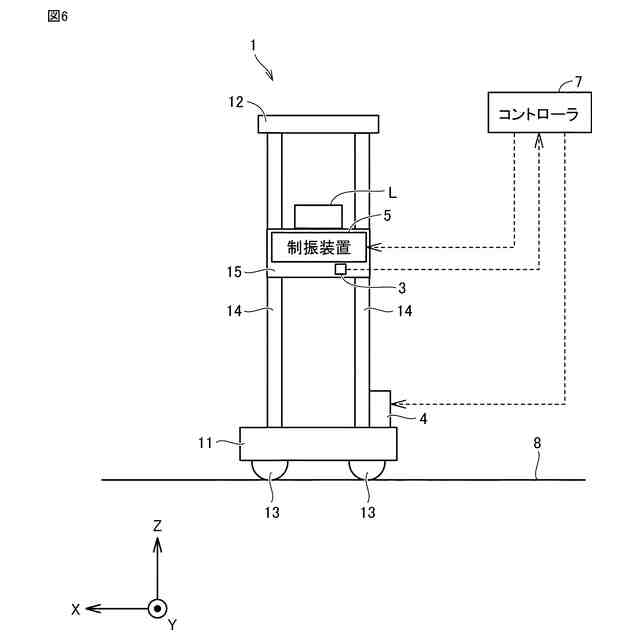
前記移動体は、
前記構造体としてのマストと、
前記マストが固定された走行台車と、
前記マストに沿って昇降するキャリッジとを含み、
前記センサは、前記加速度センサである、請求項8に記載の移動体の制振システム。
【請求項10】
前記加速度センサおよび前記錘のうちの少なくとも一方は、鉛直方向について前記マストの中点よりも上方に配置されている、請求項9に記載の移動体の制振システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の制振システムおよび移動体の制振方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特開2018-39584号公報(特許文献1)は、容易に制振効果を得られるスタッカークレーンを開示する。スタッカークレーンは、走行レールに沿って走行する走行台、走行台から直立する複数のマスト、マストの先端を連結する連結部、および、複数のマスト間に昇降可能に横架支持された移載ユニットを含む。スタッカークレーンは、走行台の走行方向に沿って移動可能に連結部に取り付けられた重錘と、走行台の加速方向または減速方向の逆向きに重錘を直線運動させる作動部とを備える。
【先行技術文献】
【特許文献】
【0003】
特開2018-39584号公報
国際公開第2020/44704号
特許第7344134号公報
特許第4194696号公報
特許第6444243号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された発明は、走行台の走行制御による積極的な制振は行っていない。そのため、振動が大きい場合は重錘を用いた制振では不十分であるおそれがある。大きい振動を重錘のみで制振しようとすると、重錘が大きくなったり、重錘の作動距離または速度が大きくなったりするためである。
【0005】
特許文献1に記載の走行台を例とした移動体において、移動体に固定された構造体(たとえば特許文献1の移載ユニット)に発生する振動を軽減し、好ましくは除去する技術に対する要望が常に存在する。
【0006】
本発明は上記課題を解決するためになされたものであり、本発明の目的の1つは、移動体において発生する振動を軽減することである。
【課題を解決するための手段】
【0007】
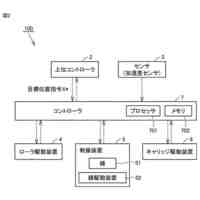
本発明のある局面に係る移動体の制御システムは、制振対象の構造体が固定された移動体と、移動体を移動指令に従って第1方向に移動させる第1の駆動装置と、構造体に設置された錘を第2方向に駆動する第2の駆動装置と、少なくとも第2方向における構造体の振動または変形を検出するセンサと、第1および第2の駆動装置を制御する制御装置とを備える。制御装置は、構造体が制振されるように、移動指令に応じて第1の駆動装置を制御し、第1の駆動装置による構造体の制振中に、構造体がさらに制振されるように、センサにより検出された振動または変形に基づいて第2の駆動装置を制御する。
【0008】
上記構成において、制御装置は、構造体が制振されるように、移動指令に応じて第1の駆動装置を制振するとともに、構造体がさらに制振されるように、上記センサにより検出された振動または変形に基づいて第2の駆動装置を制御する。これにより、第1方向の制振が第1の駆動装置により実現されるだけでなく、第2方向における制振が第2の駆動装置により実現される。よって、上記構成によれば、移動体において発生する振動を軽減できる。特に、第1および第2の駆動装置のうちのいずれか一方による構造体の制振しか行われない場合と比べて、構造体の振動を一層低減できる。
【0009】
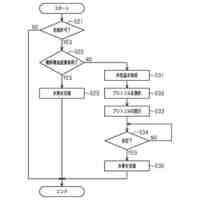
本発明の他の局面に係る移動体の制振方法において、移動体には制振対象の構造体が固定されている。制振方法は、移動体を移動指令に従って第1方向に移動させるステップと、第1方向に移動する構造体を移動指令に応じて制振するステップとを含む。制振するステップは、第2方向における構造体の振動または変形をセンサにより検出し、構造体に設置された錘をセンサにより検出された振動または変形に基づいて第2方向に駆動することによって、構造体をさらに制振するステップを含む。
【0010】
上記方法によれば、上記構成と同様に、移動体において発生する振動を軽減できる。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
分散板
6日前
株式会社豊田自動織機
産業車両
8日前
株式会社豊田自動織機
回転電機
1日前
株式会社豊田自動織機
回転電機
1日前
株式会社豊田自動織機
産業車両
2日前
株式会社豊田自動織機
蓄電装置
5日前
株式会社豊田自動織機
遠心圧縮機
6日前
株式会社豊田自動織機
電動圧縮機
1日前
株式会社豊田自動織機
遠心圧縮機
今日
株式会社豊田自動織機
牽引システム
12日前
株式会社豊田自動織機
搬送システム
9日前
株式会社豊田自動織機
搬送システム
9日前
株式会社豊田自動織機
荷役システム
5日前
株式会社豊田自動織機
モータ冷却装置
20日前
株式会社豊田自動織機
蓄電モジュール
今日
株式会社豊田自動織機
蓄電モジュール
5日前
株式会社豊田自動織機
燃料電池システム
5日前
株式会社豊田自動織機
車両制御システム
5日前
株式会社豊田自動織機
水素充填システム
2日前
株式会社豊田自動織機
回転電機のステータ
9日前
株式会社豊田自動織機
燃料電池モジュール
20日前
株式会社豊田自動織機
回転電機のステータ
9日前
株式会社豊田自動織機
回転電機のステータ
9日前
株式会社豊田自動織機
産業車両の油圧駆動装置
20日前
株式会社豊田自動織機
蓄電モジュール製造装置
15日前
株式会社豊田自動織機
制御装置および制御方法
9日前
株式会社豊田自動織機
蓄電モジュール製造方法
8日前
株式会社豊田自動織機
被牽引車及び牽引システム
20日前
株式会社豊田自動織機
内燃機関の排気浄化システム
9日前
株式会社豊田自動織機
エアジェット織機の緯入れ装置
1日前
株式会社豊田自動織機
移動体の制振システムおよび移動体の制振方法
5日前
トヨタ自動車株式会社
蓄電モジュールの製造方法
19日前
トヨタ自動車株式会社
電池の製造方法、及び、電池
2日前
株式会社豊田自動織機
内燃機関の点火制御装置及び内燃機関の点火制御方法
12日前
トヨタ自動車株式会社
電池の製造方法、及び、電池
12日前
トヨタ自動車株式会社
蓄電装置および蓄電システム
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ