TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085079
公報種別
公開特許公報(A)
公開日
2025-06-04
出願番号
2024199349
出願日
2024-11-15
発明の名称
ホモグラフィの取得装置、方法及び電子機器
出願人
富士通株式会社
代理人
弁理士法人ITOH
主分類
G06T
3/20 20060101AFI20250528BHJP(計算;計数)
要約
【課題】本発明の実施例は、ホモグラフィの取得装置、方法及び電子機器を提供する。
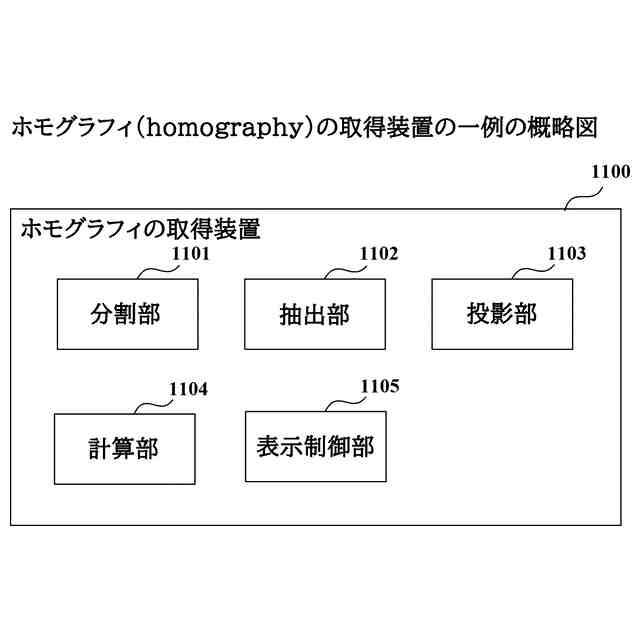
【解決手段】該装置は、カメラにより撮影された画像を分割する分割部と、該画像における消失点を判断し、異なる消失点に対応する線分を取得し、該画像の分割結果に基づいて所定のオブジェクトに分布する線分を保留し、該所定のオブジェクトに分布する線分に基づいて該画像における矩形を抽出する抽出部と、該矩形の頂点をレイアウト図における対応する点に投影する投影部と、該矩形の頂点の座標及び該レイアウト図における対応する点の座標に基づいて、ホモグラフィを計算する計算部と、を含む。本発明によれば、ホモグラフィの計算の正確性を向上させ、作業量を低減させることができる。
【選択図】図11
特許請求の範囲
【請求項1】
ホモグラフィ(homography)の取得装置であって、
カメラにより撮影された画像を分割する分割部と、
前記画像における消失点を判断し、異なる消失点に対応する線分を取得し、前記画像の分割結果に基づいて所定のオブジェクトに分布する線分を保留し、前記所定のオブジェクトに分布する線分に基づいて前記画像における矩形を抽出する抽出部と、
前記矩形の頂点をレイアウト図における対応する点に投影する投影部と、
前記矩形の頂点の座標及び前記レイアウト図における対応する点の座標に基づいて、ホモグラフィを計算する計算部と、を含む、装置。
続きを表示(約 2,400 文字)
【請求項2】
前記矩形の頂点をレイアウト図における対応する点に投影することは、
前記矩形における前記カメラに最も近い辺の延在方向を第1の軸の方向とすることと、
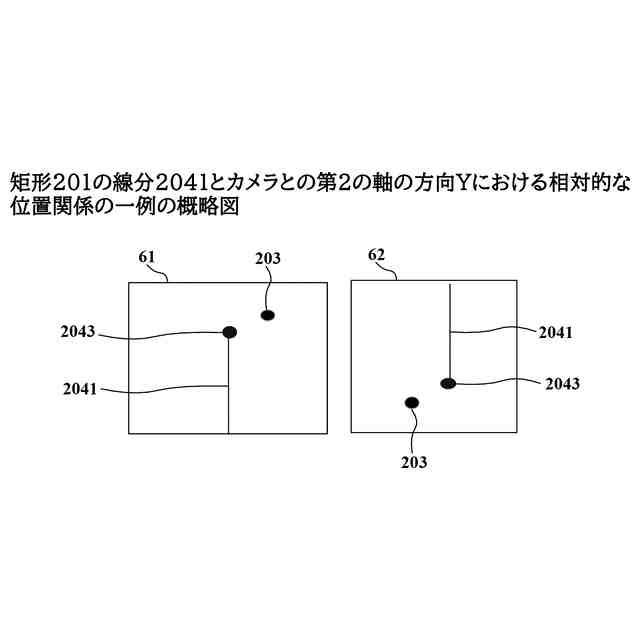
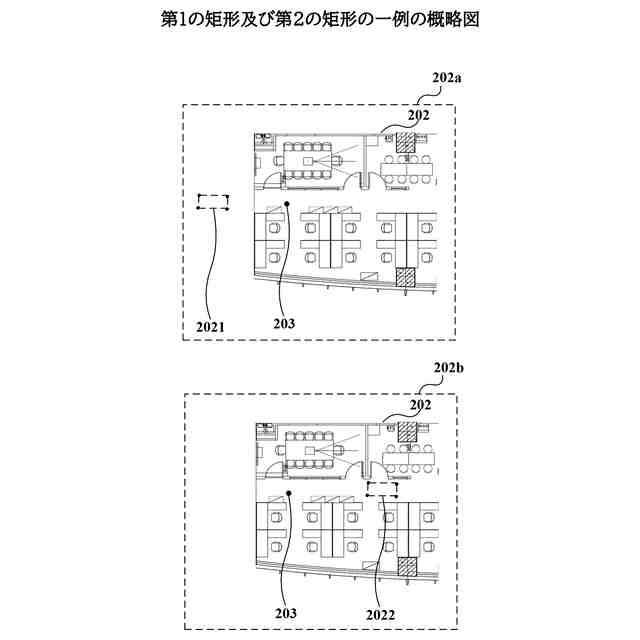
前記矩形における前記カメラに最も近い辺の上の前記カメラに最も近い点に基づいて、前記矩形が前記第1の軸に垂直な第2の軸の方向に前記カメラの一方側に位置する場合の前記矩形の第1の形状を決定し、前記矩形が前記カメラの他方側に位置する場合の前記矩形の第2の形状を決定することと、
前記第1の形状に基づいて、前記レイアウト図における第1の矩形を決定し、前記第2の形状に基づいて、前記レイアウト図における第2の矩形を決定することと、
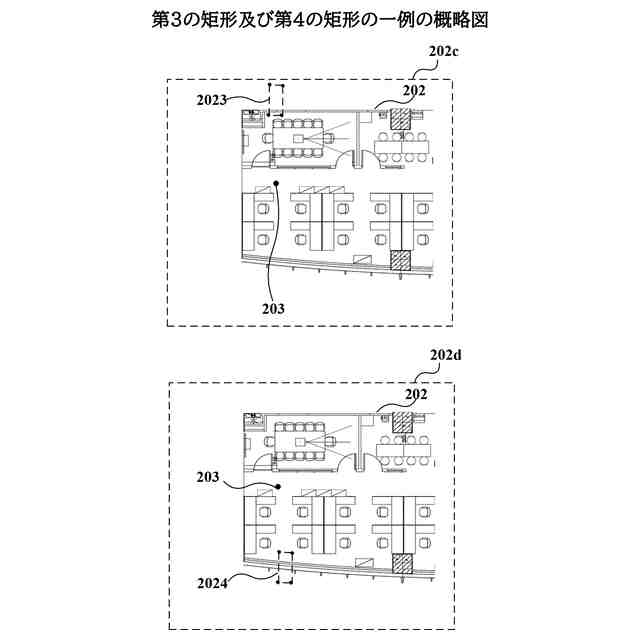
前記矩形における前記カメラに最も近い辺の上の前記カメラに最も近い点に基づいて、前記矩形が前記第1の軸の方向に前記カメラの一方側に位置する場合の前記矩形の第3の形状を決定し、前記矩形が前記カメラの他方側に位置する場合の前記矩形の第4の形状を決定することと、
前記第3の形状に基づいて、前記レイアウト図における第3の矩形を決定し、前記第4の形状に基づいて、前記レイアウト図における第4の矩形を決定することと、
前記第1の矩形、前記第2の矩形、前記第3の矩形及び前記第4の矩形の前記レイアウト図における位置に基づいて、所定の規則に従って、前記画像における前記矩形に対応するレイアウト図における矩形を決定することと、を含む、請求項1に記載の装置。
【請求項3】
前記所定の規則は、
前記レイアウト図において、前記矩形の占める前記所定のオブジェクトに対応する領域の面積が最も大きいこと、及び/又は、
前記矩形が前記レイアウト図の範囲を超えていないことを含む、請求項2に記載の装置。
【請求項4】
前記矩形の頂点の座標及び前記レイアウト図における対応する点の座標に基づいて、ホモグラフィを計算することは、
前記画像における前記矩形の頂点の画素座標系を第1の座標系とし、各頂点の画素座標を前記第1の座標系における座標とすることと、
前記レイアウト図における対応する点の世界座標系を前記レイアウト図の画素座標系に変換して第2の座標系とし、各頂点の前記第2の座標系における座標を計算することと、
各頂点の前記第1の座標系における座標及び各頂点の前記第2の座標系における座標に基づいて、前記ホモグラフィを取得することと、を含む、請求項1に記載の装置。
【請求項5】
前記画像における前記矩形における画像内容を前記レイアウト図の前記矩形に対応する位置に表示する表示制御部、をさらに含む、請求項1に記載の装置。
【請求項6】
前記画像の方向と前記レイアウト図の方向とが一致しない場合、前記画像における前記矩形における画像内容の方向を回転させ、回転後の前記画像内容を前記レイアウト図の前記矩形に対応する位置に表示する、請求項5に記載の装置。
【請求項7】
請求項1乃至6の何れかに記載のホモグラフィの取得装置を含む、電子機器。
【請求項8】
ホモグラフィ(homography)の取得方法であって、
カメラにより撮影された画像を分割するステップと、
前記画像における消失点を判断し、異なる消失点に対応する線分を取得し、前記画像の分割結果に基づいて所定のオブジェクトに分布する線分を保留し、前記所定のオブジェクトに分布する線分に基づいて前記画像における矩形を抽出するステップと、
前記矩形の頂点をレイアウト図における対応する点に投影するステップと、
前記矩形の頂点の座標及び前記レイアウト図における対応する点の座標に基づいて、ホモグラフィを計算するステップと、を含む、方法。
【請求項9】
前記矩形の頂点をレイアウト図における対応する点に投影するステップは、
前記矩形における前記カメラに最も近い辺の延在方向を第1の軸の方向とするステップと、
前記矩形における前記カメラに最も近い辺の上の前記カメラに最も近い点に基づいて、前記矩形が前記第1の軸に垂直な第2の軸の方向に前記カメラの一方側に位置する場合の前記矩形の第1の形状を決定し、前記矩形が前記カメラの他方側に位置する場合の前記矩形の第2の形状を決定するステップと、
前記第1の形状に基づいて、前記レイアウト図における第1の矩形を決定し、前記第2の形状に基づいて、前記レイアウト図における第2の矩形を決定するステップと、
前記矩形における前記カメラに最も近い辺の上の前記カメラに最も近い点に基づいて、前記矩形が前記第1の軸の方向に前記カメラの一方側に位置する場合の前記矩形の第3の形状を決定し、前記矩形が前記カメラの他方側に位置する場合の前記矩形の第4の形状を決定するステップと、
前記第3の形状に基づいて、前記レイアウト図における第3の矩形を決定し、前記第4の形状に基づいて、前記レイアウト図における第4の矩形を決定するステップと、
前記第1の矩形、前記第2の矩形、前記第3の矩形及び前記第4の矩形の前記レイアウト図における位置に基づいて、所定の規則に従って、前記画像における前記矩形に対応するレイアウト図における矩形を決定するステップと、を含む、請求項8に記載の方法。
【請求項10】
前記所定の規則は、
前記レイアウト図において、前記矩形の占める前記所定のオブジェクトに対応する領域の面積が最も大きいこと、及び/又は、
前記矩形が前記レイアウト図の範囲を超えていないことを含む、請求項9に記載の方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施例は、画像処理の技術分野に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ホモグラフィ(homography)は、1つの平面から他の平面への投影マッピングを表すことができる。例えば、カメラにより所定の空間に対して撮影された画像と該所定の空間のレイアウト図(layout)との間にホモグラフィを確立してもよく、このホモグラフィにより、画像における任意の点をレイアウト図に投影することができる。
【0003】
従来技術では、通常、手動でのラベル付けにより、カメラにより撮影された画像に複数の点をラベル付けし、対応するレイアウト図において、該ラベル付けされた複数の点にそれぞれ対応する点を探し、その後、ホモグラフィ行列(homography matrix)を計算してホモグラフィを取得する。
【0004】
なお、上述した技術背景の説明は、本発明の技術案を明確、完全に理解させるための説明であり、当業者を理解させるために記述されているものである。これらの技術案は、単なる本発明の背景技術部分として説明されたものであり、当業者により周知されたものではない。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、本発明の発明者の発見によると、上記のホモグラフィを取得する方法では、画像における点を手動でラベル付けし、レイアウト図における対応する点を探す必要があるため、作業量が大きく、ラベル付けが不正確であり、或いは見つかった対応する点が不正確であるという問題が発生しやすい。
【0006】
上記の技術的問題点の少なくとも1つを鑑み、本発明の実施例は、画像の消失点に基づいて線分を決定し、画像における矩形を設定し、矩形の各頂点をレイアウト図における対応する点に投影することで、ホモグラフィを計算することによって、ホモグラフィの計算の正確性を向上させ、作業量を低減させることができる、ホモグラフィの取得装置、方法及び電子機器を提供する。
【課題を解決するための手段】
【0007】
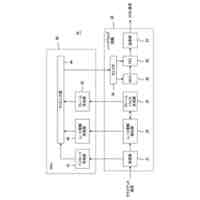
本発明の実施例の1つの態様では、ホモグラフィ(homography)の取得装置であって、カメラにより撮影された画像を分割する分割部と、前記画像における消失点を判断し、異なる消失点に対応する線分を取得し、前記画像の分割結果に基づいて所定のオブジェクトに分布する線分を保留し、前記所定のオブジェクトに分布する線分に基づいて前記画像における矩形を抽出する抽出部と、前記矩形の頂点をレイアウト図における対応する点に投影する投影部と、前記矩形の頂点の座標及び前記レイアウト図における対応する点の座標に基づいて、ホモグラフィを計算する計算部と、を含む、装置を提供する。
【0008】
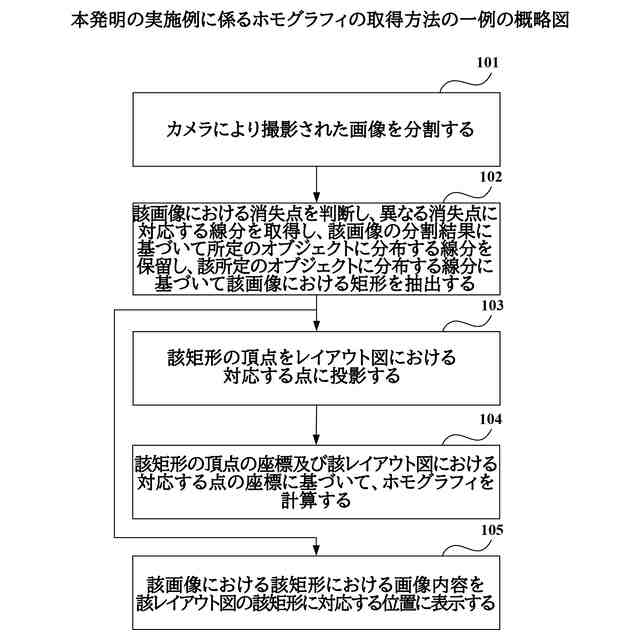
本発明の実施例のもう1つの態様では、ホモグラフィ(homography)の取得方法であって、カメラにより撮影された画像を分割するステップと、前記画像における消失点を判断し、異なる消失点に対応する線分を取得し、前記画像の分割結果に基づいて所定のオブジェクトに分布する線分を保留し、前記所定のオブジェクトに分布する線分に基づいて前記画像における矩形を抽出するステップと、前記矩形の頂点をレイアウト図における対応する点に投影するステップと、前記矩形の頂点の座標及び前記レイアウト図における対応する点の座標に基づいて、ホモグラフィを計算するステップと、を含む、方法を提供する。
【0009】
本発明の実施例のもう1つの態様では、コンピュータプログラムが記憶されたメモリと、プロセッサとを含む電子機器であって、前記プロセッサは、前記コンピュータプログラムを実行して上記のホモグラフィの取得方法を実現するように構成される、電子機器を提供する。
【0010】
本発明の実施例の有利な効果の1つは以下の通りである。画像の消失点に基づいて線分を決定し、画像における矩形を設定し、矩形の各頂点をレイアウト図における対応する点に投影することで、ホモグラフィを計算することによって、ホモグラフィの計算の正確性を向上させ、作業量を低減させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
富士通株式会社
測定装置
1か月前
富士通株式会社
光伝送装置
2か月前
富士通株式会社
画像変換機器と方法
1か月前
富士通株式会社
光伝送装置および光伝送方法
1か月前
富士通株式会社
信号相関量の確定装置と方法
1か月前
富士通株式会社
データセット特徴タイプ推論
1か月前
富士通株式会社
制御装置及び基地局制御方法
4日前
富士通株式会社
マーキング方法及びプログラム
10日前
富士通株式会社
光受信装置及び光伝送システム
2か月前
富士通株式会社
量子ビットデバイスの製造方法
3日前
富士通株式会社
制御プログラム、および制御方法
1か月前
富士通株式会社
光伝送装置および光伝送システム
1か月前
富士通株式会社
双方向光リンクの異常モニタリング
1か月前
富士通株式会社
バイアスのための生成人工知能の検査
24日前
富士通株式会社
人工知能ベースのサステナブル材料設計
2か月前
富士通株式会社
情報処理プログラムおよび情報処理方法
1か月前
富士通株式会社
制御プログラム、制御方法及び決済装置
27日前
富士通株式会社
大規模言語モデルを使用したデータ調整
1か月前
富士通株式会社
通信管理装置および無線リソース予測方法
1か月前
富士通株式会社
管理装置、管理方法および管理プログラム
1か月前
富士通株式会社
選択プログラム、選択装置、及び選択方法
1か月前
富士通株式会社
量子デバイス及び量子デバイスの制御方法
10日前
富士通株式会社
圧縮プログラム、圧縮方法および圧縮装置
1か月前
富士通株式会社
ホモグラフィの取得装置、方法及び電子機器
2か月前
富士通株式会社
光送信機サブ信号光位相差の確定装置と方法
1か月前
富士通株式会社
無線アクセスネットワークプロビジョニング
1か月前
富士通株式会社
赤外線センサ、及び赤外線センサの製造方法
1か月前
富士通株式会社
広告画像を生成する方法、装置及び記憶媒体
1か月前
富士通株式会社
学習プログラム、学習方法および情報処理装置
3日前
富士通株式会社
因果関係分析方法及び因果関係分析プログラム
2か月前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
1か月前
富士通株式会社
プログラム、データ処理方法およびデータ処理装置
2か月前
富士通株式会社
メモリ駆動装置、光伝送システム、及びメモリ駆動方法
2か月前
富士通株式会社
ログ管理装置、ログ管理方法およびログ管理プログラム
2か月前
富士通株式会社
レース投票券購入方法及びレース投票券購入プログラム
1か月前
富士通株式会社
強化学習プログラム、強化学習方法および情報処理装置
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ