TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090012
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2024199347
出願日
2024-11-15
発明の名称
画像変換機器と方法
出願人
富士通株式会社
代理人
弁理士法人ITOH
主分類
G06T
7/80 20170101AFI20250609BHJP(計算;計数)
要約
【課題】本発明は、画像変換機器と方法を提供する。
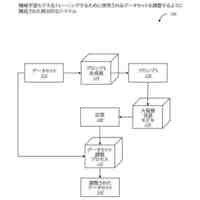
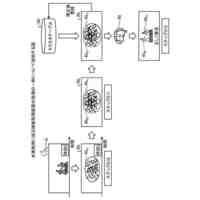
【解決手段】かかる機器は、オリジナル画像の第一パラメータの値に基づいて前記オリジナル画像に対して第一画像処理を行って中間画像を取得する第一画像処理装置;前記中間画像の前記第一パラメータの値に基づいて前記中間画像に対して第一画像処理を繰り返して実行して最終中間画像を取得する反復装置;歪み有り画像とその対応する透視画像との間の変換関係、前記オリジナル画像、及び前記最終中間画像に基づいて、前記第一パラメータの推定値を推定する推定装置;及び、前記第一パラメータの推定値に基づいて前記オリジナル画像に対して第二画像処理を行って変換画像を取得する第二画像処理装置を含む。
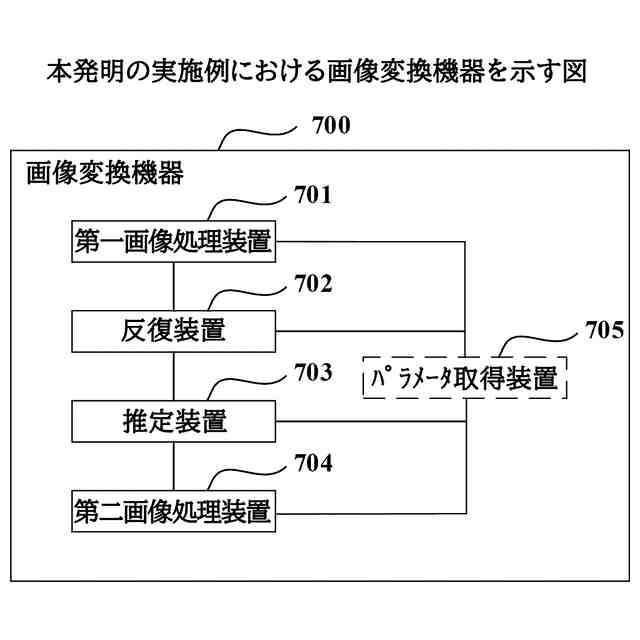
【選択図】図7
特許請求の範囲
【請求項1】
画像を変換する機器であって、
オリジナル画像の第一パラメータの値に基づいて前記オリジナル画像に対して第一画像処理を行って中間画像を取得する第一画像処理装置;
前記中間画像の前記第一パラメータの値に基づいて前記中間画像に対して第一画像処理を繰り返して実行して最終中間画像を取得する反復装置;
歪み有り画像と、対応する透視画像との間の変換関係、前記オリジナル画像、及び前記最終中間画像に基づいて、前記第一パラメータの推定値を推定する推定装置;及び
前記第一パラメータの推定値に基づいて前記オリジナル画像に対して第二画像処理を行って変換画像を取得する第二画像処理装置を含む、機器。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の機器であって、
前記反復装置が実行する反復の終了条件は前記第一パラメータの値の変化傾向が反転し始めること又は所定の反復回数に達することを含む、機器。
【請求項3】
請求項1に記載の機器であって、
前記変換関係は透視画像から歪み有り画像への変換の第一変換関係を含み、
前記推定装置は前記第一変換関係に基づいて前記最終中間画像を対応する歪み有り画像に変換し、かつ前記最終中間画像に対応する歪み有り画像及び前記オリジナル画像に基づいて第一差分関数の値が最小のときの前記第一パラメータの推定値を取得し、
前記第一差分関数は前記最終中間画像に対応する歪み有り画像と前記オリジナル画像との間の差異を表す、機器。
【請求項4】
請求項1に記載の機器であって、
前記変換関係は歪み有り画像から透視画像へ変換の第二変換関係を含み、
前記推定装置は前記第二変換関係に基づいて前記最終中間画像を対応する透視画像に変換し、かつ前記最終中間画像に対応する透視画像及び前記オリジナル画像に基づいて第二差分関数の値が最小のときの前記第一パラメータの推定値を取得し、
前記第二差分関数は前記最終中間画像に対応する透視画像と前記オリジナル画像との間の差異を表す、機器。
【請求項5】
請求項3又は4に記載の機器であって、
前記推定装置は最小二乗法を用いて前記第一パラメータの前記推定値を計算する、機器。
【請求項6】
請求項1に記載の機器であって、
前記第一パラメータは画像に対応するカメラの焦点距離及び/又は歪み係数を含む、機器。
【請求項7】
請求項3に記載の機器であって、
前記第一画像処理装置が前記第一画像処理を行うことは、
前記オリジナル画像のサイズに基づいて拡大率を推定してキャンバスを拡大し;
前記オリジナル画像の前記第一パラメータの値に基づいて拡大後のキャンバスに対してバイリニア補間処理を行って第一補間画像を取得し;
前記第一補間画像に対してトリミング処理を行って前記オリジナル画像のアスペクト比に等しいアスペクト比の第一トリミング画像を取得し;及び
前記第一トリミング画像に対して拡縮処理を行って前記オリジナル画像のサイズと同じサイズの前記中間画像を取得することを含む、機器。
【請求項8】
請求項3に記載の機器であって、
前記第二画像処理装置が前記第二画像処理を行うことは、
前記オリジナル画像のサイズに基づいて拡大率を推定してキャンバスを拡大し;
前記第一パラメータの前記推定値に基づいて拡大後のキャンバスに対してバイリニア補間処理を行って第二補間画像を取得し;
前記第二補間画像に対してトリミング処理を行って前記オリジナル画像のアスペクト比に等しいアスペクト比の第二トリミング画像を取得し;及び
前記第二トリミング画像に対して拡縮処理を行って前記オリジナル画像のサイズと同じサイズの前記変換画像を得ることを含む、機器。
【請求項9】
請求項1に記載の機器であって、
前記オリジナル画像の第一パラメータの値及び前記中間画像の第一パラメータの値を取得するパラメータ取得装置をさらに含む、機器。
【請求項10】
画像を変換する方法であって、
オリジナル画像の第一パラメータの値に基づいて前記オリジナル画像に対して第一画像処理を行って中間画像を取得し;
前記中間画像の前記第一パラメータの値に基づいて前記中間画像に対して第一画像処理を繰り返して実行して最終中間画像を取得し;
歪み有り画像と、対応する透視画像との間の変換関係、前記オリジナル画像、及び前記最終中間画像に基づいて、前記第一パラメータの推定値を推定し;及び
前記第一パラメータの推定値に基づいて前記オリジナル画像に対して第二画像処理を行って変換画像を取得することを含む、方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像処理の技術分野に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
コンピュータビジョン技術が既に生産や生活のあらゆる側面で幅広く適用されている。カメラのキャリブレーションがコンピュータビジョン技術の重要な部分である。カメラのキャリブレーション方法には主に内部カメラパラメータキャリブレーション方式及び外部カメラパラメータキャリブレーション方式が含まれ、そのうち、内部カメラパラメータキャリブレーション技術にはカメラレンズに起因する非線形歪み係数も含まれる。
【0003】
従来のカメラキャリブレーション方法では、サイズが既知のキャリブレーションオブジェクト(calibration object)を使用する必要があり、キャリブレーションオブジェクト上の既知の座標を持つ点と、その画像点との間の対応関係を確立することで、所定のアルゴリズムを用いてカメラモデルの内部と外部のパラメータを取得する。キャリブレーションプロセスではキャリブレーションオブジェクトが常に必要であるため、キャリブレーションオブジェクトの製作精度はキャリブレーション結果に影響を及ぼすことがあり、また、キャリブレーションオブジェクトの配置が適切でない場合に、該方法は制限されることもある。
【0004】
よって、キャリブレーションオブジェクトを必要としないカメラキャリブレーション方法、例えば、カメラキャリブレーション用のディープラーニング方法に基づいてRGB画像を用いてカメラの内部パラメータを推定する方法が提案されている。これにより、カメラキャリブレーションの適用範囲を広げることができる。
【0005】
なお、上述の背景技術についての紹介は、本発明の技術案を明確かつ完全に説明し、また、当業者がそれを理解しやすいためのものである。これらの技術案は、本発明の背景技術に記述されているため、当業者にとって周知であると解釈してはならない。
【発明の概要】
【発明が解決しようとする課題】
【0006】
発明者が次のようなことを発見した。即ち、従来技術では、画像の歪み(distortion)が比較的小さく又は歪みが存在しないときに、ディープラーニング方法を用いて得られたカメラパラメータの精度は高くなく、画像に比較的大きな歪みが存在するときに、ディープラーニング方法により推定されたパラメータを用いて画像歪み除去プロセスを1回だけ実行することで得られた歪み除去後画像には依然として多くの歪み成分があり、また、該パラメータを用いて歪み除去プロセスを複数回実行すると、歪み除去後画像の画質は低下する。
【0007】
上述の問題のうちの少なくとも1つに鑑み、本発明の実施例は画像変換機器と方法を提供する。
【課題を解決するための手段】
【0008】
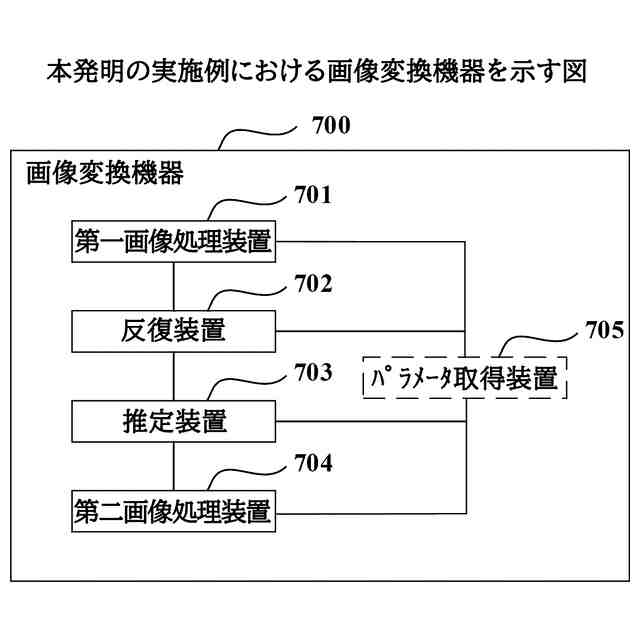
本発明の実施例の第一側面によれば、画像変換機器が提供され、前記機器は、
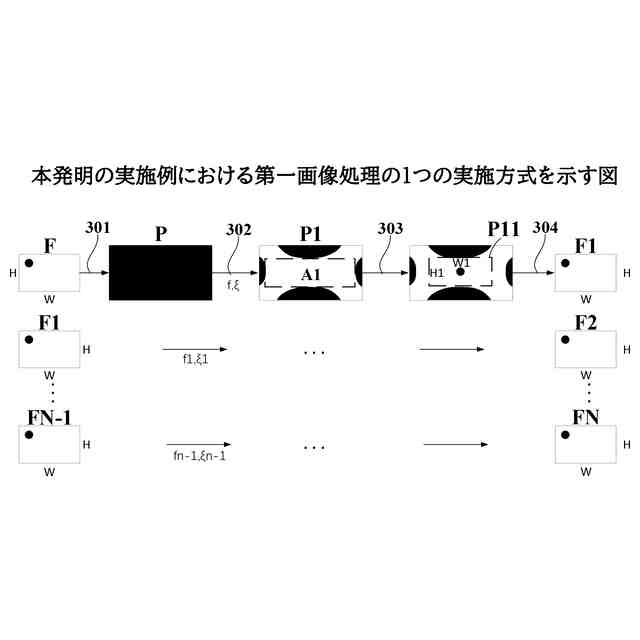
オリジナル画像の第一パラメータの値に基づいて前記オリジナル画像に対して第一画像処理を行って中間画像を得る第一画像処理装置;
前記中間画像の前記第一パラメータの値に基づいて前記中間画像に対して第一画像処理を繰り返して実行して最終中間画像を得る反復(iteration)装置;
歪み有り画像と、対応する透視画像(perspective image)との間の変換関係、前記オリジナル画像、及び前記最終中間画像に基づいて、前記第一パラメータの推定値を推定する推定装置;及び
前記第一パラメータの推定値に基づいて前記オリジナル画像に対して第二画像処理を行って変換画像を得る第二画像処理装置を含む。
【0009】
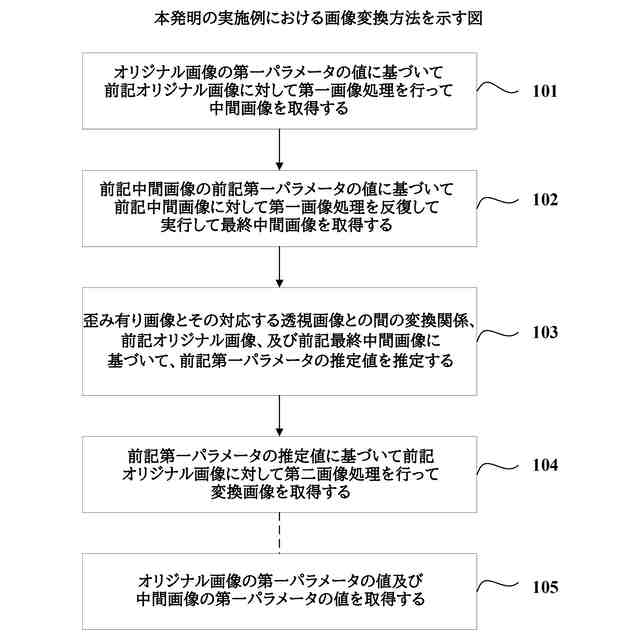
本発明の実施例の第二側面によれば、画像変換方法が提供され、前記方法は、
オリジナル画像の第一パラメータの値に基づいて前記オリジナル画像に対して第一画像処理を行って中間画像を取得し;
前記中間画像の前記第一パラメータの値に基づいて前記中間画像に対して第一画像処理を繰り返して実行して最終中間画像を取得し;
歪み有り画像と、対応する透視画像との間の変換関係、前記オリジナル画像、及び前記最終中間画像に基づいて、前記第一パラメータの推定値を推定し;及び
前記第一パラメータの推定値に基づいて前記オリジナル画像に対して第二画像処理を行って変換画像を取得することを含む。
【発明の効果】
【0010】
本発明の実施例の有利な効果は少なくとも次のとおりである。即ち、オリジナル画像に対して画像処理を複数回行って複数の中間画像を取得し、オリジナル画像及び複数の中間画像を訓練データとして第一パラメータの推定値を推定することにより、高精度の第一パラメータを得ることができるため、オリジナル画像の歪みを除去するときに画像歪み除去精度を向上させることができ、また、該高精度のパラメータに基づいてオリジナル画像に対して画像処理を行うことにより、歪み除去効果が良く、かつ画質が高い画像を得ることができ、さらに、オリジナル画像に歪みを加えるときに実際の状況に近いディストーション画像(歪んだ画像)を得ることができるため、異なるシーンでの適用に対応することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
富士通株式会社
医用画像処理方法
1か月前
富士通株式会社
転倒検出方法及び装置
1か月前
富士通株式会社
ハイブリッド光増幅器
16日前
富士通株式会社
量子デバイスの製造方法
28日前
富士通株式会社
信号相関量の確定装置と方法
2か月前
富士通株式会社
制御装置及び基地局制御方法
1か月前
富士通株式会社
データセット特徴タイプ推論
2か月前
富士通株式会社
量子ビットデバイスの製造方法
1か月前
富士通株式会社
マーキング方法及びプログラム
1か月前
富士通株式会社
光伝送装置および光伝送システム
2か月前
富士通株式会社
双方向光リンクの異常モニタリング
2か月前
富士通株式会社
ポイントクラウドレジストレーション
28日前
富士通株式会社
バイアスのための生成人工知能の検査
2か月前
富士通株式会社
データ転送制御装置および情報処理装置
1か月前
富士通株式会社
視線誘導方法および視線誘導プログラム
23日前
富士通株式会社
情報処理プログラムおよび情報処理方法
2か月前
富士通株式会社
大規模言語モデルを使用したデータ調整
2か月前
富士通株式会社
データ転送制御装置および情報処理装置
1か月前
富士通株式会社
制御プログラム、制御方法及び決済装置
2か月前
富士通株式会社
選択プログラム、選択装置、及び選択方法
2か月前
富士通株式会社
量子デバイス及び量子デバイスの制御方法
1か月前
富士通株式会社
生成人工知能を使用したデータセット符号化
9日前
富士通株式会社
無線アクセスネットワークプロビジョニング
2か月前
富士通株式会社
演算システムおよび演算システムの制御方法
6日前
富士通株式会社
光送信機サブ信号光位相差の確定装置と方法
2か月前
富士通株式会社
広告画像を生成する方法、装置及び記憶媒体
2か月前
富士通株式会社
赤外線センサ、及び赤外線センサの製造方法
2か月前
富士通株式会社
推定プログラム、推定方法および情報処理装置
21日前
富士通株式会社
学習プログラム、学習方法、及び情報処理装置
1か月前
富士通株式会社
学習プログラム、学習方法および情報処理装置
1か月前
富士通株式会社
推定プログラム、推定方法および情報処理装置
27日前
富士通株式会社
画像を記述する構造化テキストを生成する方法
22日前
富士通株式会社
描画プログラム、描画方法および情報処理装置
1か月前
富士通株式会社
シストリック型の演算アレイ装置及び制御方法
今日
富士通株式会社
予測プログラム、予測方法および情報処理装置
今日
富士通株式会社
演算プログラム、演算方法、および情報処理装置
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ