TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025077691
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023190075
出願日
2023-11-07
発明の名称
移動体の運転制御システムおよび運転制御方法
出願人
株式会社日立製作所
代理人
弁理士法人第一国際特許事務所
主分類
B61L
27/20 20220101AFI20250512BHJP(鉄道)
要約
【課題】先行する移動体や支障物等への衝突を防止するための運転制御システムとして、専用のトランスポンダを不要して簡易に位置情報を取得し、移動体側の路線情報の保有や移動体側の制御部における高い処理性能を不要にする。
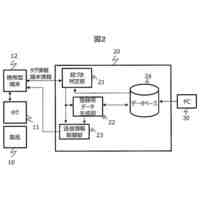
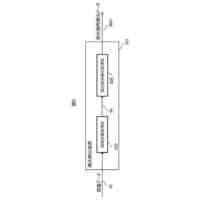
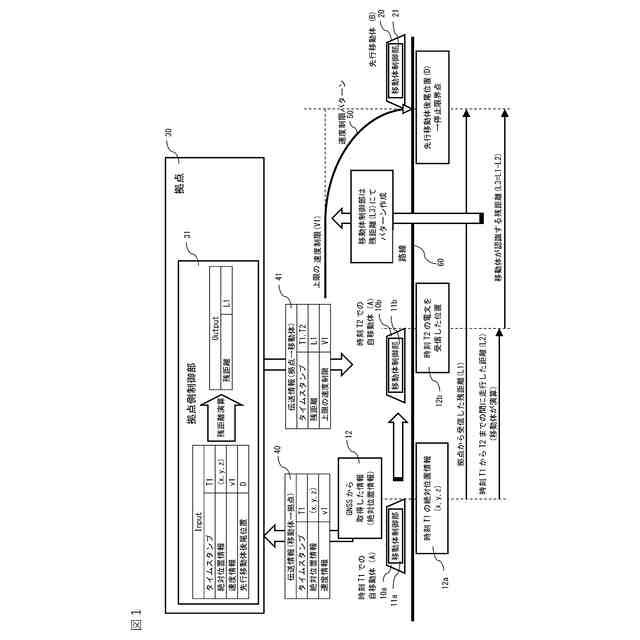
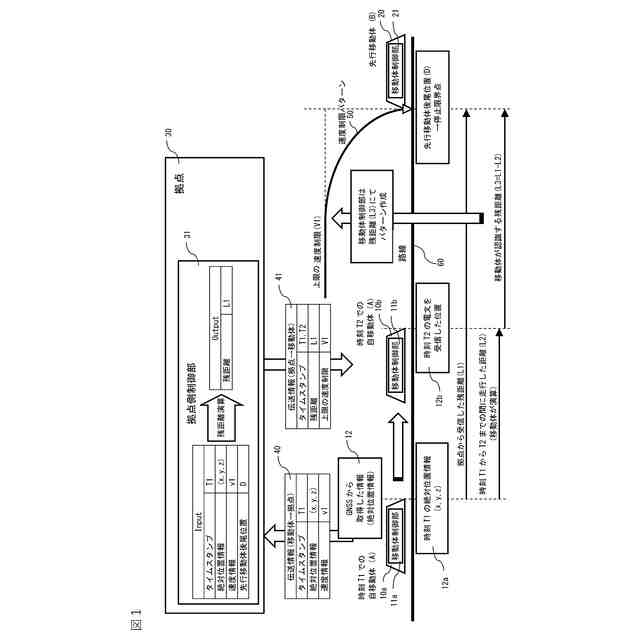
【解決手段】移動体の運転制御システムとして、移動体に搭載され当該移動体の制御を行う移動体制御部と、移動体と情報を送受信する拠点側に配置される拠点側制御部とを備え、移動体制御部は、外部から受信した移動体の走行位置の少なくとも緯度および経度の情報から当該移動体の絶対位置情報を取得して拠点側制御部へ伝送すると共に、拠点側制御部から伝送された指示情報に基づいて移動体の速度制限パターンを作成し、拠点側制御部は、移動体制御部から伝送された移動体の絶対位置情報に基づいて移動体の走行に支障を来す支障点までの残距離情報を算出し、当該残距離情報を含む指示情報を移動体制御部へ伝送する。
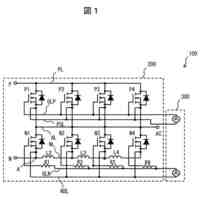
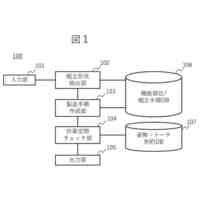
【選択図】図1
特許請求の範囲
【請求項1】
移動体の運転制御システムであって、
前記移動体に搭載され当該移動体の制御を行う移動体制御部と、
前記移動体と情報を送受信する拠点側に配置される拠点側制御部と
を備え、
前記移動体制御部は、
外部から受信した前記移動体の走行位置の少なくとも緯度および経度の情報から当該移動体の絶対位置情報を取得して前記拠点側制御部へ伝送すると共に、前記拠点側制御部から伝送された指示情報に基づいて前記移動体の速度制限パターンを作成し、
前記拠点側制御部は、
前記移動体制御部から伝送された前記移動体の絶対位置情報に基づいて前記移動体の走行に支障を来す支障点までの残距離情報を算出し、当該残距離情報を含む前記指示情報を前記移動体制御部へ伝送する
ことを特徴とする移動体の運転制御システム。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の移動体の運転制御システムであって、
前記移動体制御部は、前記移動体の絶対位置情報と共に当該絶対位置情報を取得した時点の第1の時刻情報および当該移動体の速度情報を併せて前記拠点側制御部に伝送し、
前記拠点側制御部は、前記指示情報に当該指示情報を伝送する時点の第2の時刻情報を含め、
更に、前記移動体制御部は、前記指示情報に含まれる前記残距離情報から前記第1の時刻情報と前記第2の時刻情報との間に前記移動体が走行した距離分を差し引いて前記速度制限パターンを作成する
ことを特徴とする移動体の運転制御システム。
【請求項3】
請求項2に記載の移動体の運転制御システムであって、
前記支障点は、前記移動体に先行する別の移動体に対する停止限界点である
ことを特徴とする移動体の運転制御システム。
【請求項4】
請求項1から3のいずれか1項に記載の移動体の運転制御システムであって、
前記移動体は鉄道車両、前記拠点側は地上装置側、である
ことを特徴とする移動体の列車制御システム。
【請求項5】
請求項1から3のいずれか1項に記載の移動体の運転制御システムであって、
前記移動体制御部は、前記緯度および経度の情報をGNSS(Global Navigation Satellite System)から受信する
ことを特徴とする移動体の運転制御システム。
【請求項6】
請求項5に記載の移動体の運転制御システムであって、
前記移動体制御部は、前記GNSSから更に高さの情報を受信し、前記移動体の絶対位置情報に前記高さの情報を加える
ことを特徴とする移動体の運転制御システム。
【請求項7】
請求項1から3のいずれか1項に記載の移動体の運転制御システムであって、
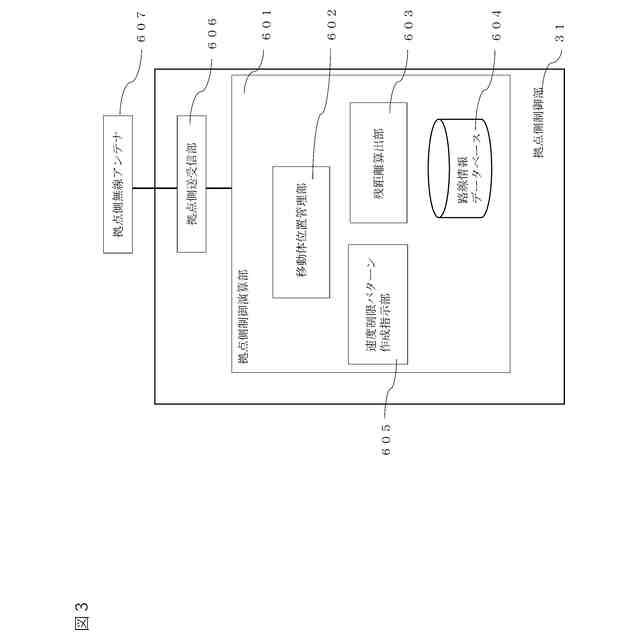
前記拠点側制御部は、前記移動体が走行する路線に関する情報を格納した路線情報データベースを備え、前記移動体の絶対位置情報および当該路線に関する情報に基づいて前記支障点までの残距離情報を算出する
ことを特徴とする移動体の運転制御システム。
【請求項8】
移動体の処理装置であって、
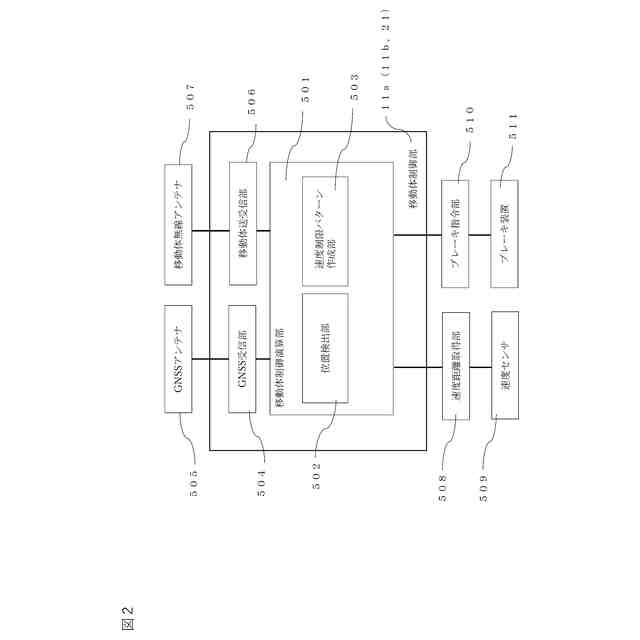
GNSS(Global Navigation Satellite System)から当該移動体の走行位置の少なくとも緯度および経度の情報を受信するGNSS受信部と、
拠点側と情報の送受を行う送受信部と、
前記緯度および経度の情報から当該移動体の絶対位置情報を取得して前記拠点側へ送信し、前記拠点側から受信した指示情報に基づいて、当該移動体の走行に支障を来す支障点までの速度制限パターンを作成する制御部と
を備える移動体の処理装置。
【請求項9】
移動体と相互に情報を送受する拠点側の処理装置であって、
前記移動体と情報を送受信する送受信部と、
前記移動体が走行する路線に関する情報を格納した路線情報データベースと、
前記移動体から送信された当該移動体の絶対位置情報および前記路線に関する情報に基づき、前記移動体へ送信する指示情報として前記移動体の走行に支障を来す支障点までの残距離情報を算出する制御部と
を備える拠点側の処理装置。
【請求項10】
移動体の運転制御方法であって、
前記移動体側で、当該移動体の走行位置の少なくとも緯度および経度の情報を受信し、当該緯度および経度の情報から前記移動体の絶対位置情報を取得し、当該絶対位置情報を拠点側へ伝送する第1のステップと、
前記拠点側で、前記移動体から伝送された前記移動体の絶対位置情報に基づいて前記移動体の走行に支障を来す支障点までの残距離情報を算出し、当該残距離情報を前記移動体に対する指示情報に含めて前記移動体へ伝送する第2のステップと、
前記移動体側で、前記拠点側から伝送された前記指示情報に基づいて当該移動体の速度制限パターンを作成する第3のステップと
を有する移動体の運転制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の運転制御システムおよび運転制御方法に関し、先行する移動体や設置物への衝突を防止するための制御を行うものである。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
鉄道車両などの移動体においては、信号システムによって走行制御を行い、先行する移動体との衝突を防止している。この信号システムには色々な方式が提案されており、ひとつの方式としては、軌道回路などを利用して移動体の位置情報を拠点側で把握した上で、移動体に対してその場所における許容速度情報を送信する方式がある。この方式によれば、軌道回路などの移動体の所在を検知するための仕組みが必要であり、設備の導入や保守費用等が高額となるという欠点を持っている。
【0003】
これを解決するために、「CBTC(Communications-Based Train Control)方式」と呼ばれる技術が提案されている。この技術は、走行する路線を仮想的なブロックで区切り、そのブロックの名称とブロック内の位置で移動体の位置を表現した上で、ブロック内に設置したトランスポンダと近距離無線通信することにより、そのトランスポンダが示すブロックおよびブロック内位置を移動体において認識し、その位置を基に移動体自身の在線位置を拠点に示すことで、拠点が移動体の在線を認識できるようにした方式である。
【0004】
また、移動体の位置情報を取得する際に、専用のトランスポンダではなく、「GNSS(Global Navigation Satellite System)」を使用することができる。ここで、GNSSと記載したものは、アメリカが開発した「GPS(Global Positioning System)」、ロシアが開発した「GLONASS」、ヨーロッパが開発した「Galileo」、中国が開発した「北斗」、日本が開発した「みちびき」などの衛星測位システムのことである。
【先行技術文献】
【特許文献】
【0005】
特開2013-23054号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
一般的なCBTC方式の場合、移動体側と拠点側の双方で、仮想ブロック情報を含む共通の路線情報を保有していることが必要になること、および、専用のトランスポンダが必要になることにより、設備の導入費用が高額となる他にも、路線形状を変更する場合などの路線情報の更新が煩雑になる。更に、トランスポンダについては、移動体において所定のブロックおよびブロック内位置であることを直接的または間接的に分かるような情報を出力させる必要があるため、このシステム専用に情報を定義する必要性やその位置にトランスポンダを設置する必要性が発生する。
【0007】
また、移動体側での路線情報のデータの扱いが複雑になることから、移動体側の制御部は比較的高い処理性能が必要となる。加えて、移動体側で当該路線の路線情報を保有しておく必要がある。その際に、この路線情報をデータベースとして持つ場合が多く、そのためデータ検索処理が必要になり、移動体側での処理負担が大きくなる。逆に、当該路線の路線情報を保有していない移動体は、その路線を走行できないことになる。
【0008】
一方で、上記したGNSSを使用する場合、GNSSから取得できる情報は、緯度、経度および高度による3次元の絶対位置を示す情報である。そのため、当該路線との位置の関係性が分かりにくいことになる。この位置の関係性を把握し、移動体が当該路線のどの位置に在線するのかを把握するためには、移動体の位置と路線の形状を同一座標系で示す必要がある。
【0009】
そのため、当該路線の形状について、緯度、経度および高度による3次元の情報として把握しておく必要がある。ただし、この路線情報はデータ量が多いため、保有するためには大容量の記憶部が必要であり、また、3次元の情報を扱い演算するためには、比較的高い処理性能が必要となる。
しかし、移動体側では、大容量の記憶部や比較的高い処理性能の演算部を設けることが困難である場合が多い。
【0010】
本発明の目的は、専用のトランスポンダを不要とすること、および、移動体側の制御部による路線情報の保有を不要とすること、また、移動体側の制御部において高い処理性能を不要とするシステムを提供することである。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
軌条車両
8日前
株式会社日立製作所
回転電機
7日前
株式会社日立製作所
電力変換装置
18日前
株式会社日立製作所
電力変換装置
18日前
株式会社日立製作所
電力変換装置
18日前
株式会社日立製作所
電力変換装置
12日前
株式会社日立製作所
気体圧縮装置
4日前
株式会社日立製作所
水電解システム
11日前
株式会社日立製作所
回路設計支援装置
今日
株式会社日立製作所
作業支援システム
5日前
株式会社日立製作所
軌道計画システム
7日前
株式会社日立製作所
設計支援装置及び方法
1日前
株式会社日立製作所
電力変換装置の冷却構造
18日前
株式会社日立製作所
再生品販売支援システム
7日前
株式会社日立製作所
巻上機及びエレベーター
18日前
株式会社日立製作所
診断装置および診断方法
4日前
株式会社日立製作所
外転型回転電機及び巻上機
1日前
株式会社日立製作所
乗りかご及びエレベーター
7日前
株式会社日立製作所
設計支援システムおよび方法
8日前
株式会社日立製作所
制御装置、及び情報提示方法
6日前
株式会社日立製作所
乗り場ドア及びエレベーター
8日前
株式会社日立製作所
最適化システム及び最適化方法
7日前
株式会社日立製作所
人工衛星及び人工衛星システム
7日前
株式会社日立製作所
漏水検出装置及びシステム、方法
12日前
株式会社日立製作所
電力変換装置および電力変換方法
7日前
株式会社日立製作所
蓄電池部分の輸送および保管方法
7日前
株式会社日立製作所
超電導コイルおよび超電導磁石装置
8日前
株式会社日立製作所
品目検索システム及び品目検索方法
11日前
株式会社日立製作所
雲高計測システム及び雲高計測方法
7日前
株式会社日立製作所
欠陥検査システム及び欠陥検査方法
12日前
株式会社日立製作所
原料照合システム及び原料照合方法
7日前
株式会社日立製作所
電力取引システム及び電力取引方法。
5日前
株式会社日立製作所
障害検知システム、及び障害検知方法
5日前
株式会社日立製作所
設計製造支援装置及び設計製造支援方法
12日前
株式会社日立製作所
材料情報管理システム及び審査支援方法
7日前
株式会社日立製作所
意思決定支援システム及び意思決定方法
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ