TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025049783
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023158179
出願日
2023-09-22
発明の名称
姿勢検出システム及び姿勢検出方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G06T
7/00 20170101AFI20250327BHJP(計算;計数)
要約
【課題】処理を高速化しつつ、精度の高いワークの姿勢検出システムを提供する。
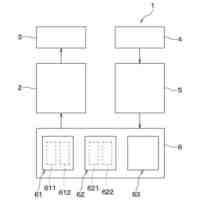
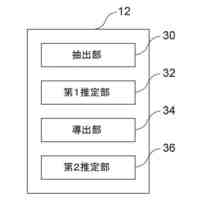
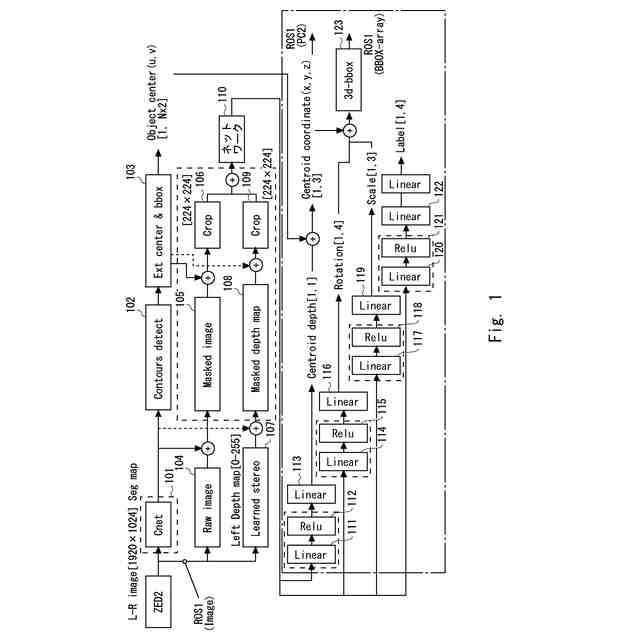
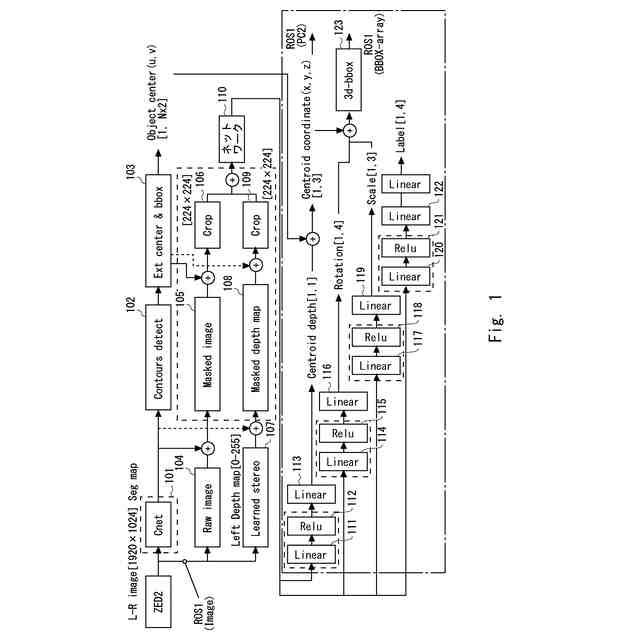
【解決手段】撮像装置で撮影した対象物のRGB画像からマスク画像を取得するマスク画像取得部と、複数の撮像装置で撮影した対象物のRGB画像に基づいて、対象物の位置までの奥行を推定する奥行推定モデルと、マスク画像から対象物をくり抜き、くり抜いた対象物の画像と奥行のデータに基づいて対象物の姿勢を検出する姿勢検出部と、を備える姿勢検出システが提供される。
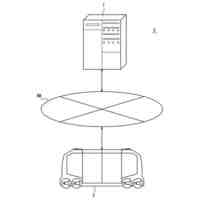
【選択図】図1
特許請求の範囲
【請求項1】
撮像装置で撮影した対象物のRGB画像からマスク画像を取得するマスク画像取得部と、
複数の撮像装置で撮影した前記対象物のRGB画像に基づいて、前記対象物の位置までの奥行を推定する奥行推定モデルと、
前記マスク画像から前記対象物をくり抜き、くり抜いた前記対象物の画像と前記奥行のデータに基づいて前記対象物の姿勢を検出する姿勢検出部と、を備える姿勢検出システム。
続きを表示(約 1,000 文字)
【請求項2】
前記マスク画像取得部は、
前記対象物のマスク画像に物体のシルエット画像を配置した粗い前記対象物のマスク画像を入力データとし、きれいな前記対象物のマスク画像を教示データとして学習し、前記対象物のマスク画像からきれいな前記対象物のマスク画像を出力する第1の機械学習器と、
前記対象物のRGB画像を入力とし、きれいな前記対象物のマスク画像を教示データとして学習し、前記対象物のRGB画像からきれいな前記対象物のマスク画像を出力する第2の機械学習器と、を用いて、前記対象物のRGB画像を入力とし、きれいな前記対象物のマスク画像を出力する、請求項1に記載の姿勢検出システム。
【請求項3】
前記奥行推定モデルは、
前記対象物のRGB画像からマスク画像を取得し、
前記マスク画像をPaddingで正方形の画像に加工し、
前記正方形の画像から物体検出モデルで前記対象物を検出し、
検出した前記対象物を機械学習器に入力して奥行を推定する、請求項1に記載の姿勢検出システム。
【請求項4】
前記姿勢検出部は、
前記マスク画像から2次元のBounding Box位置を検出し、前記対象物の2次元の座標を推定し、
前記マスク画像から前記対象物のセグメントマスクの画像をくり抜き、Paddingで正方形の画像に加工し、
前記正方形の画像から物体検出モデルで前記対象物を検出し、
検出した前記対象物を機械学習器に入力して3次元の大きさを推定し、
前記3次元の大きさから前記対象物の3D Bounding Boxの頂点座標を算出し、
前記頂点座標から前記3D Bounding Boxの回転座標を算出し、
前記奥行のデータ、前記2次元の座標、前記3次元の大きさ、及び前記回転座標から前記対象物の姿勢の検出を行う、請求項1に記載の姿勢検出システム。
【請求項5】
撮像装置で撮影した対象物のRGB画像からマスク画像を取得し、
複数の撮像装置で撮影した前記対象物のRGB画像に基づいて、前記対象物の位置までの奥行を推定し、
前記マスク画像から前記対象物をくり抜き、くり抜いた前記対象物の画像と前記奥行のデータに基づいて前記対象物の姿勢を検出する姿勢検出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は姿勢検出システム及び姿勢検出方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
ロボットのエンドエフェクタによって対象物を取得するために、画像処理により対象物を認識する方法が開発されている。特許文献1では、3次元カメラを用いて、箱の2次元三原色(RGB)画像と、2次元深度マップ画像とを取得する方法が開示されている。当該方法は、画像区分プロセスを用いる。画像区分プロセスは、CPUによって実行可能な、簡単化されたマスクR-CNN(畳み込みニューラルネットワーク)を用いて、RGB画像中のいずれかの画素が各箱と関連付けられているかを予測する。各箱と関連付けられている画素には、該箱のためのマスクを定義するように結び付ける固有のラベルが付与されている。そして、当該方法は、区分画像を用いて、箱を取り上げるための位置を特定する。
【先行技術文献】
【特許文献】
【0003】
特開2023-81310号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、高度な推定モデルの場合、推定周期が遅かった。また、処理の速いモデルの場合、推定の精度・ロバスト性が低かった。そこで本開示の目的は、処理を高速化しつつ、精度の高いワークの姿勢検出システムを提供することである。
【課題を解決するための手段】
【0005】
本開示の姿勢検出システムは、
撮像装置で撮影した対象物のRGB画像からマスク画像を取得するマスク画像取得部と、
複数の撮像装置で撮影した前記対象物のRGB画像に基づいて、前記対象物の位置までの奥行を推定する奥行推定モデルと、
前記マスク画像から前記対象物をくり抜き、くり抜いた前記対象物の画像と前記奥行のデータに基づいて前記対象物の姿勢を検出する姿勢検出部と、を備える姿勢検出システムである。
【0006】
上記構成により、処理を高速化しつつ、精度の高いワークの姿勢検出システムが提供される。
【0007】
本開示の姿勢検出システムは、
前記マスク画像取得部は、
前記対象物のマスク画像に物体のシルエット画像を配置した粗い前記対象物のマスク画像を入力データとし、きれいな前記対象物のマスク画像を教示データとして学習し、前記対象物のマスク画像からきれいな前記対象物のマスク画像を出力する第1の機械学習器と、
前記対象物のRGB画像を入力とし、きれいな前記対象物のマスク画像を教示データとして学習し、前記対象物のRGB画像からきれいな前記対象物のマスク画像を出力する第2の機械学習器と、を用いて、前記対象物のRGB画像を入力とし、きれいな前記対象物のマスク画像を出力する、ことを特徴とする。
【0008】
上記構成により、対象物のRGB画像からきれいな対象物のマスク画像を取得できる。
【0009】
本開示の姿勢検出システムは、
前記奥行推定モデルは、
前記対象物のRGB画像からマスク画像を取得し、
前記マスク画像をPaddingで正方形の画像に加工し、
前記正方形の画像から物体検出モデルで前記対象物を検出し、
検出した前記対象物を機械学習器に入力して奥行を推定する、ことを特徴とする。
【0010】
上記構成により、エンドエフェクタから対象物までの距離を推定できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
正極層
1日前
トヨタ自動車株式会社
飛行体
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
車両床下構造
1日前
トヨタ自動車株式会社
電池システム
1日前
トヨタ自動車株式会社
電池モジュール
今日
トヨタ自動車株式会社
電池モジュール
今日
トヨタ自動車株式会社
電池モジュール
今日
トヨタ自動車株式会社
電池モジュール
今日
トヨタ自動車株式会社
資源の回収方法
1日前
トヨタ自動車株式会社
作業支援システム
今日
トヨタ自動車株式会社
工作機械の制御装置
1日前
トヨタ自動車株式会社
内燃機関の制御装置
今日
トヨタ自動車株式会社
資産位置特定システム
1日前
トヨタ自動車株式会社
車両サービスの提供方法
今日
トヨタ自動車株式会社
灯火制御装置及びプログラム
今日
トヨタ自動車株式会社
車両部品の残存寿命予測装置
1日前
株式会社デンソー
レーダ装置
今日
トヨタ自動車株式会社
電極活物質、電極合材および電池
1日前
株式会社デンソー
推定装置、および、推定方法
今日
トヨタ自動車株式会社
制御システム、制御装置、移動体および制御方法
今日
株式会社デンソー
推定装置、および、推定方法
今日
株式会社SOKEN
伝送装置
1日前
株式会社デンソー
スイッチング素子とその製造方法
1日前
トヨタ自動車株式会社
電極活物質、電極合材、電池、および、これらの製造方法
1日前
トヨタ自動車株式会社
電池ケースおよび電池
今日
株式会社豊田中央研究所
位置推定装置、位置推定システム及びプログラム
1日前
トヨタ自動車株式会社
車両の積荷エリア用カバー
今日
トヨタ自動車株式会社
再開手順に応答した体感品質測定
今日
株式会社トヨタマップマスター
情報処理装置、情報処理方法及び情報処理プログラム
今日
株式会社デンソー
車載装置、車載装置動作方法、および車載装置動作プログラム
1日前
株式会社デンソー
駐車支援システム、駐車支援方法およびコンピュータプログラム
今日
トヨタ自動車株式会社
車両プラットフォーム、自動運転システム、および車両制御インターフェースボックス
今日
キヤノン電子株式会社
通信システム
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ