TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059291
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169293
出願日
2023-09-29
発明の名称
駐車支援システム、駐車支援方法およびコンピュータプログラム
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
,
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G08G
1/14 20060101AFI20250403BHJP(信号)
要約
【課題】負担を強いることなくパレットを精度良く認識する。
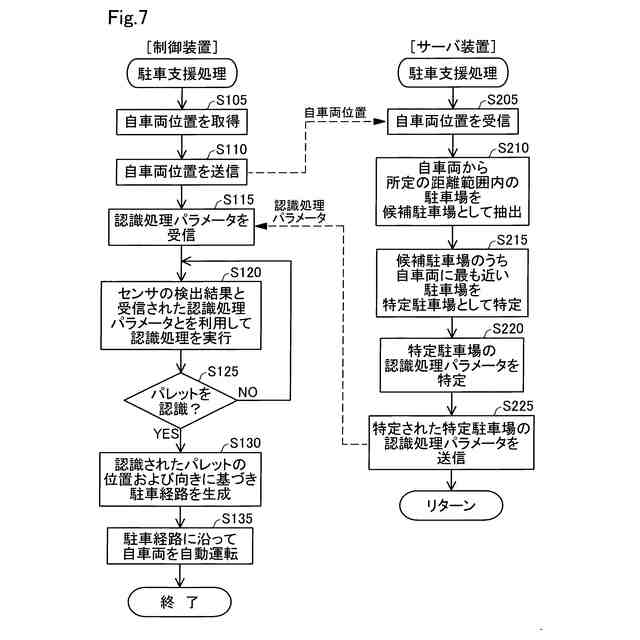
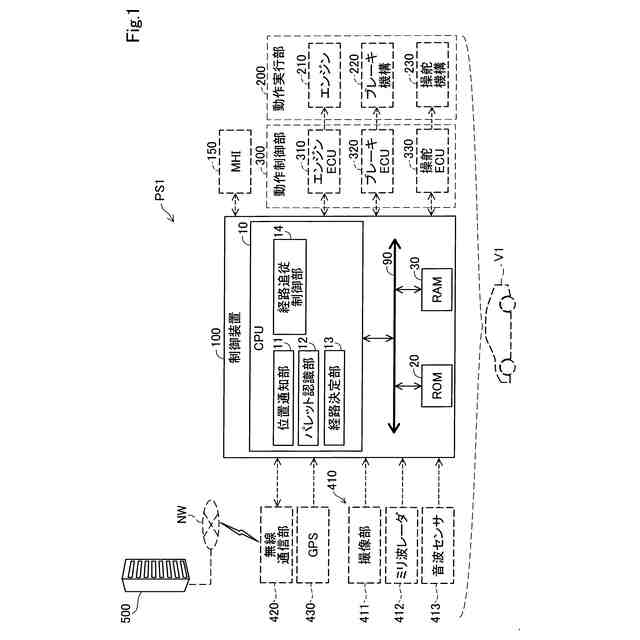
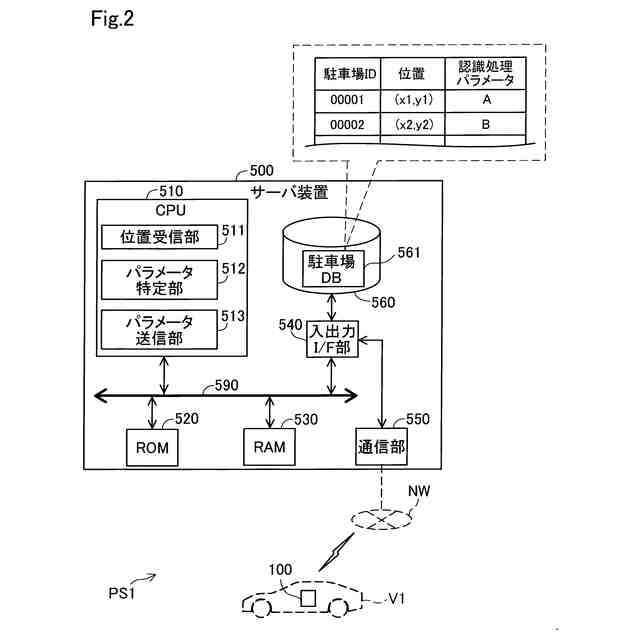
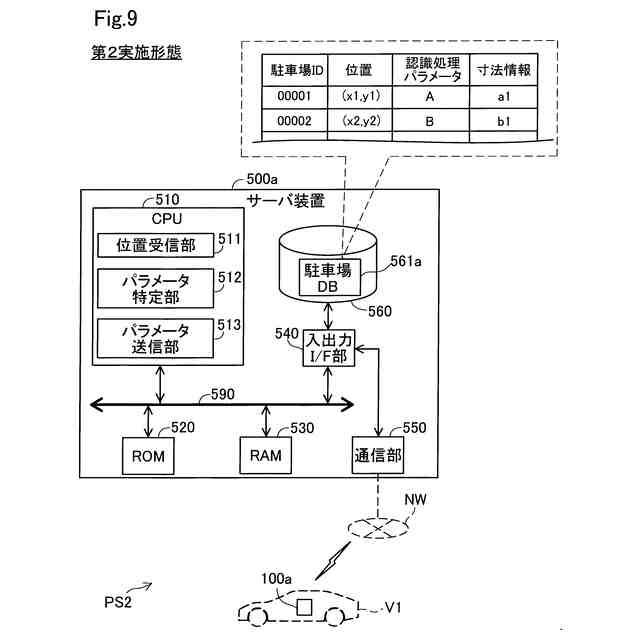
【解決手段】駐車支援システムPS1、PS2は、車両V1に搭載された制御装置100、100aと、サーバ装置500、500aとを備える。制御装置は、位置通知部11と、機械式駐車場が有するパレットp1の少なくとも位置および向きを認識する認識処理を実行するパレット認識部12とを有する。サーバ装置は、位置受信部511と、機械式駐車場の位置と認識処理パラメータとを対応付けて記憶する駐車場データベース561、561aと、特定駐車場を特定し、特定駐車場に対応付けられた認識処理パラメータを駐車場データベースを参照して特定するパラメータ特定部512と、認識処理パラメータを制御装置に送信するパラメータ送信部513とを有する。パレット認識部は、車両の周囲環境を検知するセンサ410の検出結果と、受信する認識処理パラメータとを利用して、認識処理を実行する。
【選択図】図7
特許請求の範囲
【請求項1】
機械式駐車場(MP)への車両(V1)の駐車支援を行う駐車支援システム(PS1、PS2)であって、
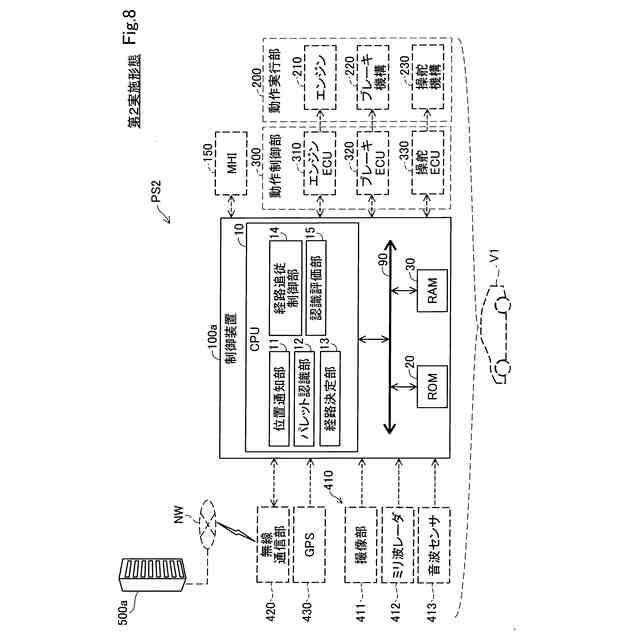
前記車両に搭載された制御装置(100、100a)と、
前記制御装置と通信可能なサーバ装置(500、500a)と、
を備え、
前記制御装置は、
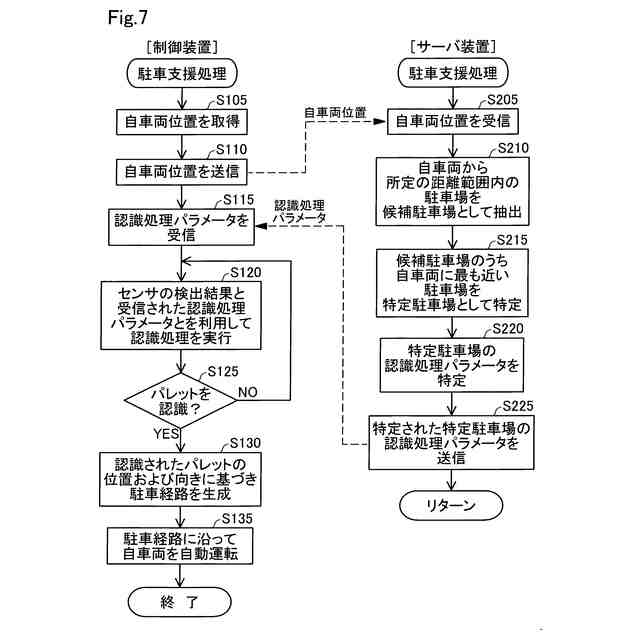
前記車両の位置である自車両位置を取得して送信する位置通知部(11)と、
機械式駐車場が有するパレット(p1)の少なくとも位置および向きを認識する認識処理を実行するパレット認識部(12)と、を有し、
前記サーバ装置は、
前記自車両位置を受信する位置受信部(511)と、
1以上の機械式駐車場について、該機械式駐車場の位置と、該機械式駐車場が有するパレットを前記認識処理により認識するために用いられるパラメータである認識処理パラメータと、を対応付けて記憶する駐車場データベース(561、561a)と、
前記1以上の機械式駐車場のうち、前記自車両位置に関連する予め定められた条件を満たす機械式駐車場である特定駐車場を特定し、前記特定駐車場に対応付けられた前記認識処理パラメータを、前記駐車場データベースを参照して特定するパラメータ特定部(512)と、
特定された前記認識処理パラメータを、前記制御装置に送信するパラメータ送信部(513)と、を有し、
前記パレット認識部は、前記車両の周囲環境を検知するセンサ(410)の検出結果と、受信する前記認識処理パラメータとを利用して、前記認識処理を実行する、
駐車支援システム。
続きを表示(約 2,400 文字)
【請求項2】
請求項1に記載の駐車支援システムにおいて、
前記駐車場データベースは、前記1以上の機械式駐車場について、前記認識処理パラメータに加えて、該機械式駐車場が有するパレットの寸法に関する情報である寸法情報を、該機械式駐車場の位置に対応付けて記憶し、
前記パラメータ特定部は、前記特定駐車場に対応付けられた前記認識処理パラメータと前記寸法情報とを、前記駐車場データベースを参照して特定し、
前記パラメータ送信部は、特定された前記認識処理パラメータと前記寸法情報とを前記制御装置に送信し、
前記パレット認識部は、前記認識処理を実行することにより、パレットの位置および向きに加えて寸法を認識し、
前記制御装置は、前記パレット認識部により認識されるパレットの寸法と、前記サーバ装置から受信する前記寸法情報が示す寸法と、を比較する比較処理を実行し、前記比較処理の結果を利用して、前記パレット認識部による前記認識処理の処理結果の妥当性を評価する認識評価部(15)を、さらに備える、
駐車支援システム。
【請求項3】
請求項2に記載の駐車支援システムにおいて、
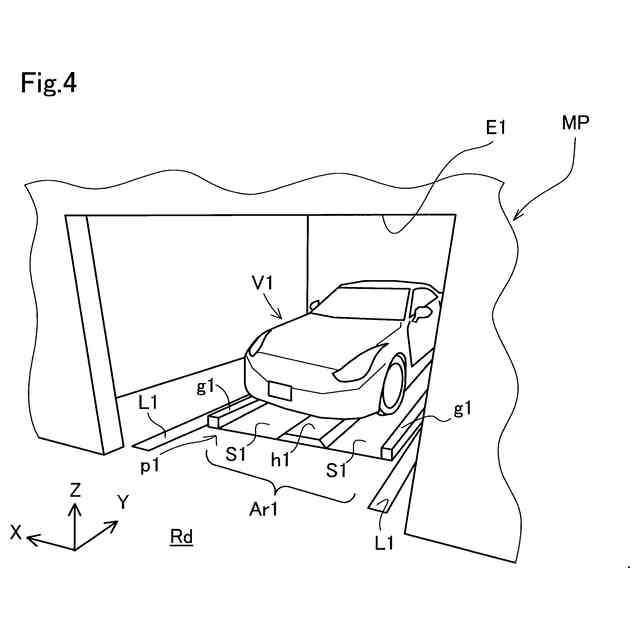
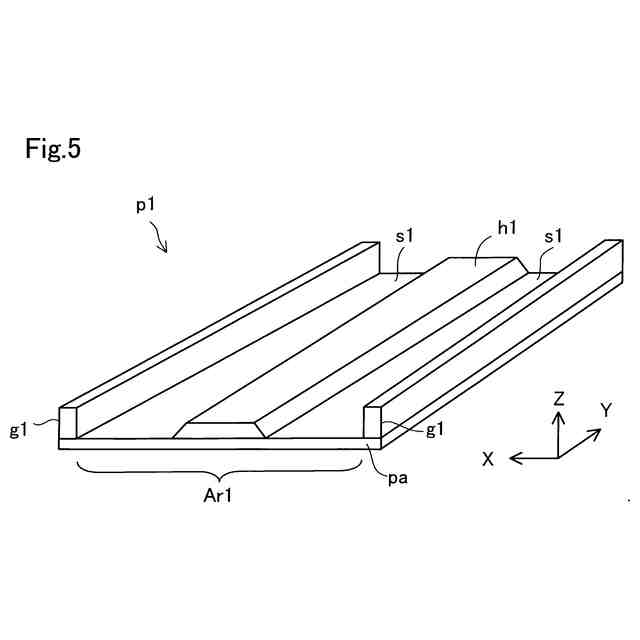
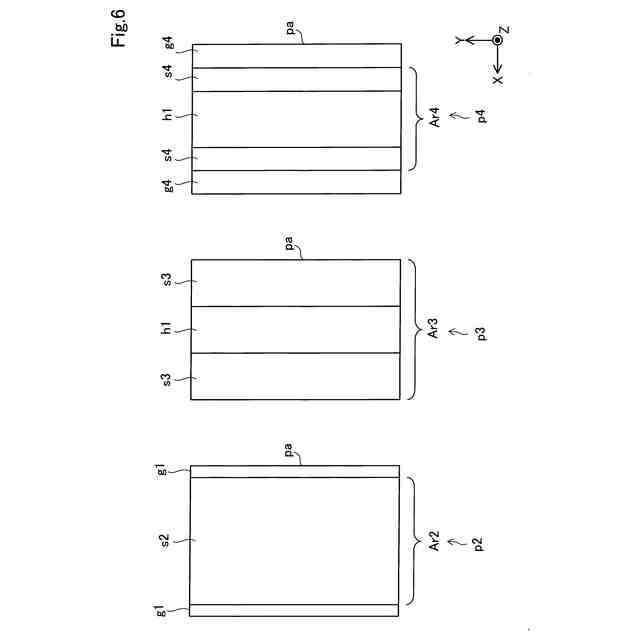
前記1以上の機械式駐車場が有するパレットは、左右の縁に配置されている一対のガード部(g1)と、前記一対のガード部に挟まれた内側部(Ar1)と、を有し、
前記寸法情報は、少なくとも前記内側部の寸法を含み、
前記パレット認識部は、前記認識処理を実行することによりパレットの寸法として、前記内側部の寸法を認識し、
前記認識評価部は、前記内側部の寸法について前記比較処理を実行する、駐車支援システム。
【請求項4】
請求項2に記載の駐車支援システムにおいて、
前記パレット認識部は、前記処理結果が妥当でないと評価した場合に、前記認識処理を再度実行する、駐車支援システム。
【請求項5】
請求項1から請求項4までのいずれか一項に記載の駐車支援システムにおいて、
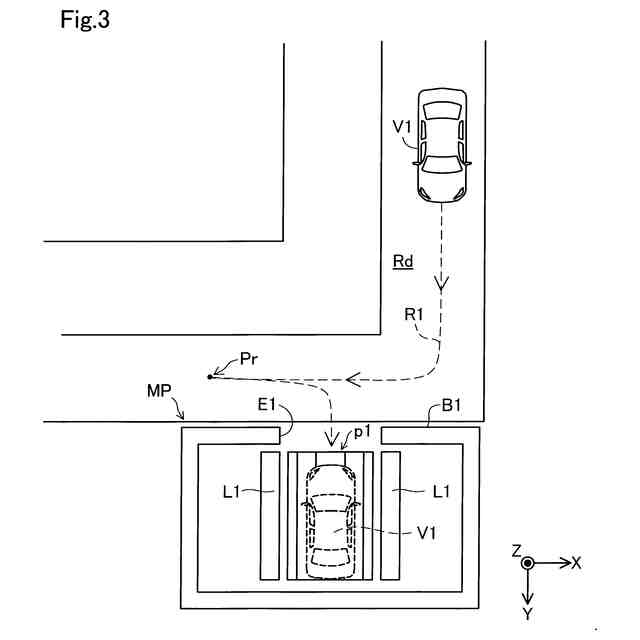
前記制御装置は、前記認識処理により認識されたパレットの位置および向きを利用して、前記車両の現在の位置から前記特定駐車場のパレットまでの駐車経路を決定する経路決定部(13)を、さらに備える、駐車支援システム。
【請求項6】
車両(V1)に搭載された制御装置(100、100a)と、前記制御装置と通信可能なサーバ装置(500、500a)と、を用いて、機械式駐車場(MP)への前記車両の駐車支援を行う駐車支援方法であって、
前記制御装置において、前記車両の位置である自車両位置を取得して送信する工程と、
前記サーバ装置において、前記自車両位置を受信する工程と、
前記サーバ装置において、1以上の機械式駐車場について、該機械式駐車場の位置と、該機械式駐車場が有するパレットを認識処理により認識するために用いられるパラメータである認識処理パラメータと、を対応付けた駐車場データベース(561、561a)を記憶する工程と、
前記サーバ装置において、前記1以上の機械式駐車場のうち、前記自車両位置に関連する予め定められた条件を満たす機械式駐車場である特定駐車場を特定し、前記特定駐車場に対応付けられた前記認識処理パラメータを、前記駐車場データベースを参照して特定する工程と、
前記サーバ装置において、特定された前記認識処理パラメータを、前記制御装置に送信する工程と、
前記制御装置において、前記車両の周囲環境を検知するセンサ(410)の検出結果と、受信する前記認識処理パラメータと、を利用して前記認識処理を実行し、機械式駐車場が有するパレット(p1)の少なくとも位置および向きを認識する工程と、
を備える、駐車支援方法。
【請求項7】
車両(V1)に搭載された制御装置(100、100a)を用いて、機械式駐車場(MP)への前記車両の駐車支援を行うためのコンピュータプログラムであって、
前記車両の位置である自車両位置を取得して送信する機能と、
前記車両の周囲環境を検知するセンサ(410)の検出結果と、サーバ装置(500、500a)から受信する認識処理パラメータであって機械式駐車場が有するパレットを認識処理により認識するために用いられるパラメータである認識処理パラメータと、を利用して前記認識処理を実行し、機械式駐車場が有するパレット(p1)の少なくとも位置および向きを認識する機能と、
を前記制御装置が有するコンピュータに実現させるためのコンピュータプログラム。
【請求項8】
車両(V1)に搭載された制御装置(100、100a)と通信可能なサーバ装置(500、500a)を用いて、機械式駐車場(MP)への前記車両の駐車支援を行うためのコンピュータプログラムであって、
1以上の機械式駐車場について、該機械式駐車場の位置と、該機械式駐車場が有するパレットを認識処理により認識するために用いられるパラメータである認識処理パラメータと、を対応付けた駐車場データベース(561、561a)を記憶する機能と、
前記車両の位置である自車両位置を受信する機能と、
前記1以上の機械式駐車場のうち、前記自車両位置に関連する予め定められた条件を満たす機械式駐車場である特定駐車場を特定し、前記特定駐車場に対応付けられた前記認識処理パラメータを、前記駐車場データベースを参照して特定する機能と、
特定された前記認識処理パラメータを、前記制御装置に送信する機能と、
を前記サーバ装置が有するコンピュータに実現させるためのコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の駐車支援に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
車両に搭載されたカメラやレーダ等のセンサの検出結果を利用して、機械式駐車場において車両が搭載される予定のパレットを認識し、かかるパレットへの駐車支援を行うシステムが種々提案されている。特許文献1は、機械式駐車場においてパレットの外周における両幅端位置の路面に車両の前後方向に沿って伸びる区間線を追加することにより、パレットを認識し易くした機械式駐車システムを開示している。特許文献2は、機械式駐車設備における出入口扉の前方の路面に、車両駐車時の目印となる白線枠を設けた自動駐車支援システムを開示している。
【先行技術文献】
【特許文献】
【0003】
特開2018-199925号公報
特開2020-051116号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1および特許文献2のシステムでは、機械式駐車設備の近傍に区画線または白線枠を塗装等により設けねばならず、駐車場の管理者に負担を強いるという問題がある。ここで、認識対象となるパレットの大きさおよび形状は、複数の機械式駐車場において互いに異なり得る。しかし、特許文献1および特許文献2では、このようなパレットの大きさおよび形状の相違は想定されていないため、パレットを精度良く認識できずに駐車支援を行えない場合が起こり得るという問題がある。そこで、負担を強いることなく、パレットを精度良く認識可能な技術が望まれる。
【課題を解決するための手段】
【0005】
本開示の一形態として、機械式駐車場(MP)への車両(V1)の駐車支援を行う駐車支援システム(PS1、PS2)が提供される。この駐車支援システムは、前記車両に搭載された制御装置(100、100a)と、前記制御装置と通信可能なサーバ装置(500、500a)と、を備える。前記制御装置は、前記車両の位置である自車両位置を取得して送信する位置通知部(11)と、機械式駐車場が有するパレット(p1)の少なくとも位置および向きを認識する認識処理を実行するパレット認識部(12)と、を有する。前記サーバ装置は、前記自車両位置を受信する位置受信部(511)と、1以上の機械式駐車場について、該機械式駐車場の位置と、該機械式駐車場が有するパレットを前記認識処理により認識するために用いられるパラメータである認識処理パラメータと、を対応付けて記憶する駐車場データベース(561、561a)と、前記1以上の機械式駐車場のうち、前記自車両位置に関連する予め定められた条件を満たす機械式駐車場である特定駐車場を特定し、前記特定駐車場に対応付けられた前記認識処理パラメータを、前記駐車場データベースを参照して特定するパラメータ特定部(512)と、特定された前記認識処理パラメータを、前記制御装置に送信するパラメータ送信部(513)と、を有する。前記パレット認識部は、前記車両の周囲環境を検知するセンサ(410)の検出結果と、受信する前記認識処理パラメータとを利用して、前記認識処理を実行する。
【0006】
この形態の駐車支援システムによれば、車両から自車両位置が送信され、サーバ装置において、受信した自車両位置を利用して、自車両位置に関する予め定められた条件を満たす機械式駐車場(特定駐車場)が特定され、かかる特定駐車場に対応付けられた認識処理パラメータが制御装置に送信され、車両のパレット認識部は、センサの検出結果と、受信した認識処理パラメータとを利用して、パレットの少なくとも位置および向きを認識する認識処理を実行するので、駐車設備の近傍の路面に区画線や白線枠などを設けるといった負担を強いることなく、パレットを精度良く認識できる。
【0007】
本開示の他の形態として、車両(V1)に搭載された制御装置(100、100a)と、前記制御装置と通信可能なサーバ装置(500、500a)と、を用いて、機械式駐車場(MP)への前記車両の駐車支援を行う駐車支援方法が提供される。この駐車支援方法は、前記制御装置において、前記車両の位置である自車両位置を取得して送信する工程と、前記サーバ装置において、前記自車両位置を受信する工程と、前記サーバ装置において、1以上の機械式駐車場について、該機械式駐車場の位置と、該機械式駐車場が有するパレットを認識処理により認識するために用いられるパラメータである認識処理パラメータと、を対応付けた駐車場データベース(561、561a)を記憶する工程と、前記サーバ装置において、前記1以上の機械式駐車場のうち、前記自車両位置に関連する予め定められた条件を満たす機械式駐車場である特定駐車場を特定し、前記特定駐車場に対応付けられた前記認識処理パラメータを、前記駐車場データベースを参照して特定する工程と、前記サーバ装置において、特定された前記認識処理パラメータを、前記制御装置に送信する工程と、前記制御装置において、前記車両の周囲環境を検知するセンサ(410)の検出結果と、受信する前記認識処理パラメータと、を利用して前記認識処理を実行し、機械式駐車場が有するパレット(p1)の少なくとも位置および向きを認識する工程と、を備える。
【0008】
この形態の駐車支援方法によれば、車両から自車両位置が送信され、サーバ装置では、受信した自車両位置を利用して、自車両位置に関する予め定められた条件を満たす機械式駐車場(特定駐車場)が特定され、かかる特定駐車場に対応付けられた認識処理パラメータが制御装置に送信され、制御装置では、センサの検出結果と、受信した認識処理パラメータとを利用して、パレットの少なくとも位置および向きを認識する認識処理が実行されるので、駐車設備の近傍の路面に区画線や白線枠などを設けるといった負担を強いることなく、パレットを精度良く認識できる。
【0009】
本開示の他の形態として、車両(V1)に搭載された制御装置(100、100a)を用いて、機械式駐車場(MP)への前記車両の駐車支援を行うためのコンピュータプログラムが提供される。このコンピュータプログラムは、前記車両の位置である自車両位置を取得して送信する機能と、前記車両の周囲環境を検知するセンサ(410)の検出結果と、サーバ装置(500、500a)から受信する認識処理パラメータであって機械式駐車場が有するパレットを認識処理により認識するために用いられるパラメータである認識処理パラメータと、を利用して前記認識処理を実行し、機械式駐車場が有するパレット(p1)の少なくとも位置および向きを認識する機能と、を前記制御装置が有するコンピュータに実現させる。
【0010】
この形態のコンピュータプログラムによれば、サーバ装置から認識処理パラメータが制御装置に送信され、制御装置では、センサの検出結果と、受信した認識処理パラメータとを利用して、パレットの少なくとも位置および向きを認識する認識処理が実行されるので、駐車設備の近傍の路面に区画線や白線枠などを設けるといった負担を強いることなく、パレットを精度良く認識できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ホーチキ株式会社
防災システム
今日
ニッタン株式会社
熱感知器
今日
ニッタン株式会社
熱感知器
今日
パナソニックIPマネジメント株式会社
検知器、検知システム、及び、中継器
1日前
本田技研工業株式会社
行動確率推定装置及び交通安全支援システム
今日
パナソニックIPマネジメント株式会社
検知器、可搬型検知器システム、及び、防災システム
1日前
株式会社SUBARU
車両通行帯違反通報システム
今日
パナソニックIPマネジメント株式会社
防災システム、検知器、検知器システム、防災方法、及び、プログラム
1日前
カーボントレードネオ株式会社
環境情報システム、二酸化炭素発生源推定方法およびプログラム
1日前
他の特許を見る

 特許ウォッチ
特許ウォッチ