TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025039576
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2024221372,2022048249
出願日
2024-12-18,2022-03-24
発明の名称
運転支援装置、運転支援方法及び運転支援プログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/09 20120101AFI20250313BHJP(車両一般)
要約
【課題】自車両を強制的に減速させつつ旋回させることにより自車両と前方物体との衝突をより確実に回避することができる運転支援装置を提供する。
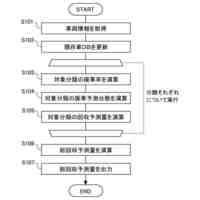
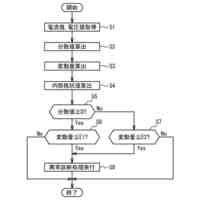
【解決手段】運転支援装置10は、制動回避制御実行時の減速度が所定減速度以下であるときには、制動回避制御を実行し、減速度が所定減速度よりも大きく且つ旋回量増加要求条件が成立していないときには、両側制動操舵回避制御を実行し、減速度が所定減速度よりも大きく且つ旋回量増加要求条件が成立しており且つ自車両100を右旋回させて物体を避けるように走行させるときには、第1片側制動操舵回避制御を実行し、減速度が所定減速度よりも大きく且つ旋回量増加要求条件が成立しており且つ自車両を左旋回させて物体を避けるように走行させるときには、第2片側制動操舵回避制御を実行する。
【選択図】 図16
特許請求の範囲
【請求項1】
自車両がその前方の物体に衝突する可能性がある場合、前記自車両と前記物体との衝突を回避する衝突回避制御を実行する制御装置を備え、
前記衝突回避制御は、
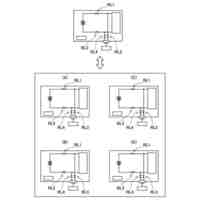
前記自車両の両側の車輪にそれぞれ等しい又は略等しい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両を強制的に旋回させることにより前記自車両と前記物体との衝突を回避する両側制動操舵回避制御と、
前記自車両の右側の車輪に左側の車輪によりも大きい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両を強制的に旋回させることにより前記自車両と前記物体との衝突を回避する第1片側制動操舵回避制御と、
前記自車両の左側の車輪に右側の車輪によりも大きい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両に強制的に旋回させることにより前記自車両と前記物体との衝突を回避する第2片側制動操舵回避制御と、
前記自車両を強制的に旋回させずに前記自車両を強制的に減速させて停止させることにより前記自車両と前記物体との衝突を回避する制動回避制御と、
を含んでいる、
運転支援装置において、
前記制御装置は、
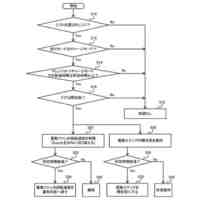
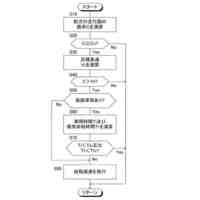
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が所定減速度以下であるときには、前記制動回避制御を実行し、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記衝突回避制御により前記自車両を強制的に旋回させたときの前記自車両の舵角の変化量に対する前記自車両の旋回量である旋回率を大きくする要求があるとの旋回量増加要求条件が成立していないときには、前記両側制動操舵回避制御を実行し、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記旋回量増加要求条件が成立しており且つ前記衝突回避制御により前記自車両を強制的に右旋回させて前記物体を避けるように走行させるときには、前記第1片側制動操舵回避制御を実行し、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記旋回量増加要求条件が成立しており且つ前記衝突回避制御により前記自車両を強制的に左旋回させて前記物体を避けるように走行させるときには、前記第2片側制動操舵回避制御を実行する、
ように構成されている、
運転支援装置。
続きを表示(約 3,200 文字)
【請求項2】
請求項1に記載の運転支援装置において、
前記旋回量増加要求条件は、前記両側制動操舵回避制御では前記物体を避けるように前記自車両を走行させることができない場合に成立する条件である、
運転支援装置。
【請求項3】
請求項1に記載の運転支援装置において、
前記旋回量増加要求条件は、前記物体を避けるように前記自車両を走行させるために必要な前記旋回率が所定旋回率よりも大きい場合に成立する条件である、
運転支援装置。
【請求項4】
請求項3に記載の運転支援装置において、
前記所定旋回率は、前記両側制動操舵回避制御により達成可能な前記旋回率の最大値である、
運転支援装置。
【請求項5】
請求項1に記載の運転支援装置において、
前記旋回量増加要求条件は、前記両側制動操舵回避制御により達成可能な前記自車両の旋回量が前記物体を避けるように前記自車両を走行させるために必要な前記自車両の旋回量よりも小さい場合に成立する条件である、
運転支援装置。
【請求項6】
請求項1乃至請求項5の何れか一項に記載の運転支援装置において、
前記制御装置は、前記両側制動操舵回避制御、前記第1片側制動操舵回避制御又は前記第2片側制動操舵回避制御を実行したときに前記物体とは別の物体に前記自車両が衝突する可能性がある場合、前記両側制動操舵回避制御、前記第1片側制動操舵回避制御及び前記第2片側制動操舵回避制御を実行しないように構成されている、
運転支援装置。
【請求項7】
請求項1乃至請求項7の何れか一項に記載の運転支援装置において、
前記自車両には、該自車両を制動する制動装置が搭載されており、
前記所定減速度は、前記制動装置により実現可能な前記自車両の減速度の最大値である、
運転支援装置。
【請求項8】
自車両がその前方の物体に衝突する可能性がある場合、前記自車両と前記物体との衝突を回避する衝突回避制御を実行する運転支援方法であって、
前記衝突回避制御は、
前記自車両の両側の車輪にそれぞれ等しい又は略等しい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両を強制的に旋回させることにより前記自車両と前記物体との衝突を回避する両側制動操舵回避制御と、
前記自車両の右側の車輪に左側の車輪によりも大きい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両を強制的に旋回させることにより前記自車両と前記物体との衝突を回避する第1片側制動操舵回避制御と、
前記自車両の左側の車輪に右側の車輪によりも大きい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両に強制的に旋回させることにより前記自車両と前記物体との衝突を回避する第2片側制動操舵回避制御と、
前記自車両を強制的に旋回させずに前記自車両を強制的に減速させて停止させることにより前記自車両と前記物体との衝突を回避する制動回避制御と、
を含んでいる、
運転支援方法において、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が所定減速度以下であるときには、前記制動回避制御を実行する工程と、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記衝突回避制御により前記自車両を強制的に旋回させたときの前記自車両の舵角の変化量に対する前記自車両の旋回量である旋回率を大きくする要求があるとの旋回量増加要求条件が成立していないときには、前記両側制動操舵回避制御を実行する工程と、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記旋回量増加要求条件が成立しており且つ前記衝突回避制御により前記自車両を強制的に右旋回させて前記物体を避けるように走行させるときには、前記第1片側制動操舵回避制御を実行する工程と、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記旋回量増加要求条件が成立しており且つ前記衝突回避制御により前記自車両を強制的に左旋回させて前記物体を避けるように走行させるときには、前記第2片側制動操舵回避制御を実行する工程と、
を有する、
運転支援方法。
【請求項9】
自車両がその前方の物体に衝突する可能性がある場合、前記自車両と前記物体との衝突を回避する衝突回避制御を実行する運転支援プログラムであって、
前記衝突回避制御は、
前記自車両の両側の車輪にそれぞれ等しい又は略等しい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両を強制的に旋回させることにより前記自車両と前記物体との衝突を回避する両側制動操舵回避制御と、
前記自車両の右側の車輪に左側の車輪によりも大きい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両を強制的に旋回させることにより前記自車両と前記物体との衝突を回避する第1片側制動操舵回避制御と、
前記自車両の左側の車輪に右側の車輪によりも大きい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両に強制的に旋回させることにより前記自車両と前記物体との衝突を回避する第2片側制動操舵回避制御と、
前記自車両を強制的に旋回させずに前記自車両を強制的に減速させて停止させることにより前記自車両と前記物体との衝突を回避する制動回避制御と、
を含んでいる、
運転支援プログラムにおいて、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が所定減速度以下であるときには、前記制動回避制御を実行し、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記衝突回避制御により前記自車両を強制的に旋回させたときの前記自車両の舵角の変化量に対する前記自車両の旋回量である旋回率を大きくする要求があるとの旋回量増加要求条件が成立していないときには、前記両側制動操舵回避制御を実行し、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記旋回量増加要求条件が成立しており且つ前記衝突回避制御により前記自車両を強制的に右旋回させて前記物体を避けるように走行させるときには、前記第1片側制動操舵回避制御を実行し、
前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記旋回量増加要求条件が成立しており且つ前記衝突回避制御により前記自車両を強制的に左旋回させて前記物体を避けるように走行させるときには、前記第2片側制動操舵回避制御を実行する、
ように構成されている、
運転支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援装置、運転支援方法及び運転支援プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
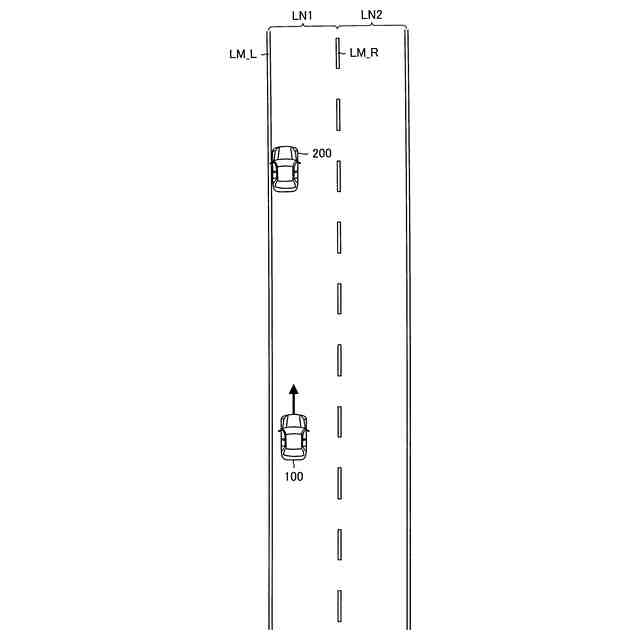
自車両を強制的に減速させて自車両がその前方の物体(前方物体)に到達する前に自車両を停止させることにより自車両と前方物体との衝突を回避する衝突回避制動を行う運転支援装置が知られている。更に、衝突回避制動を行っても自車両と前方物体との衝突を回避することができない場合、衝突回避制動に加えて、自車両が前方物体を避けて走行するように自車両を強制的に旋回させることにより自車両と前方物体との衝突を回避する衝突回避操舵を行う運転支援装置も知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第5246176号公報
【発明の概要】
【0004】
従来の運転支援装置は、衝突回避制動を行っても自車両と前方物体との衝突を回避することができない場合、衝突回避制動に加えて衝突回避操舵を行うことにより、自車両と前方物体との衝突を回避しようとするものである。別の言い方をすれば、従来の運転支援装置は、衝突回避制動により自車両と前方物体との衝突を回避することができない分を、衝突回避操舵により補うことで、自車両と前方物体との衝突を回避しようとするものである。
【0005】
しかしながら、衝突回避操舵により実現可能な自車両の横移動量には、自ずと、限界があるため、衝突回避制動を補うために衝突回避操舵を利用するというだけでは、自車両と前方物体との衝突を回避することができない場面もある。
【0006】
本発明の目的は、自車両を強制的に減速させつつ旋回させることにより自車両と前方物体との衝突をより確実に回避することができる運転支援装置、運転支援方法及び運転支援プログラムを提供することにある。
【0007】
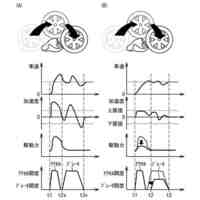
本発明に係る運転支援装置は、自車両がその前方の物体に衝突する可能性がある場合、前記自車両と前記物体との衝突を回避する衝突回避制御を実行する制御装置を備えている。前記衝突回避制御は、前記自車両の両側の車輪にそれぞれ等しい又は略等しい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両を強制的に旋回させることにより前記自車両と前記物体との衝突を回避する両側制動操舵回避制御と、前記自車両の右側の車輪に左側の車輪によりも大きい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両を強制的に旋回させることにより前記自車両と前記物体との衝突を回避する第1片側制動操舵回避制御と、前記自車両の左側の車輪に右側の車輪によりも大きい制動力を与えて前記自車両を強制的に減速させつつ、前記自車両が前記物体を避けて走行するように前記自車両に強制的に旋回させることにより前記自車両と前記物体との衝突を回避する第2片側制動操舵回避制御と、前記自車両を強制的に旋回させずに前記自車両を強制的に減速させて停止させることにより前記自車両と前記物体との衝突を回避する制動回避制御と、を含んでいる。
【0008】
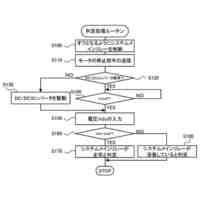
更に、本発明に係る運転支援装置において、前記制御装置は、前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が所定減速度以下であるときには、前記制動回避制御を実行し、前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記衝突回避制御により前記自車両を強制的に旋回させたときの前記自車両の舵角の変化量に対する前記自車両の旋回量である旋回率を大きくする要求があるとの旋回量増加要求条件が成立していないときには、前記両側制動操舵回避制御を実行し、前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記旋回量増加要求条件が成立しており且つ前記衝突回避制御により前記自車両を強制的に右旋回させて前記物体を避けるように走行させるときには、前記第1片側制動操舵回避制御を実行し、前記自車両が前記物体に衝突する可能性がある場合において、前記制動回避制御を実行したときの前記自車両の減速度が前記所定減速度よりも大きいときであって、前記旋回量増加要求条件が成立しており且つ前記衝突回避制御により前記自車両を強制的に左旋回させて前記物体を避けるように走行させるときには、前記第2片側制動操舵回避制御を実行するように構成されている。
【0009】
尚、本発明に係る運転支援装置において、前記旋回量増加要求条件は、例えば、前記両側制動操舵回避制御では前記物体を避けるように前記自車両を走行させることができない場合に成立する条件である。
【0010】
又、本発明に係る運転支援装置において、前記旋回量増加要求条件は、例えば、前記物体を避けるように前記自車両を走行させるために必要な前記旋回率が所定旋回率よりも大きい場合に成立する条件である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
駆動装置
1日前
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
料金設定装置
1日前
トヨタ自動車株式会社
走行制御装置
1日前
トヨタ自動車株式会社
電池システム
1日前
トヨタ自動車株式会社
金型冷却構造
1日前
トヨタ自動車株式会社
配車システム
1日前
トヨタ自動車株式会社
車両の制御装置
1日前
トヨタ自動車株式会社
車両用制御装置
1日前
トヨタ自動車株式会社
プラズマCVD装置
1日前
トヨタ自動車株式会社
電池及びモジュール
1日前
トヨタ自動車株式会社
蓄電装置の製造方法
1日前
トヨタ自動車株式会社
バッテリ異常診断装置
1日前
トヨタ自動車株式会社
テストデータ生成装置
1日前
トヨタ自動車株式会社
駆動装置および駆動装置の製造方法
1日前
トヨタ自動車株式会社
移動体、制御装置、コネクタロック制御方法
1日前
トヨタ自動車株式会社
動作状態監視システム、制御方法及びプログラム
1日前
トヨタ自動車株式会社
動作状態監視システム、制御方法及びプログラム
1日前
トヨタ自動車株式会社
動作状態監視システム、制御方法及びプログラム
1日前
トヨタバッテリー株式会社
リチウムイオン二次電池
1日前
トヨタ自動車株式会社
車両制御装置、車両制御方法及び車両制御プログラム
1日前
トヨタ自動車株式会社
動作状態監視システム、その制御方法、及び、制御プログラム
1日前
トヨタ自動車株式会社
動作状態監視システム、その制御方法、及び、制御プログラム
1日前
トヨタ自動車株式会社
動作状態監視システム、その制御方法、及び、制御プログラム
1日前
トヨタ自動車株式会社
動作状態監視システム、その制御方法、及び、制御プログラム
1日前
トヨタ自動車株式会社
正極活物質、リチウムイオン二次電池、及び正極活物質の製造方法
1日前
トヨタ自動車株式会社
動作状態監視システム、動作状態監視方法及び動作状態監視プログラム
1日前
トヨタ自動車株式会社
動作状態監視システム、動作状態監視方法、及び、動作状態監視プログラム
1日前
株式会社デンソー
半導体装置の製造方法
1日前
トヨタ自動車株式会社
非接触給電システム、サーバ及び非接触給電方法
1日前
個人
飛行自動車
2か月前
個人
警告装置
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ