TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025011568
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023113755
出願日
2023-07-11
発明の名称
通信装置、ラウンドトリップタイムの推定方法及びラウンドトリップタイムの推定プログラム
出願人
株式会社デンソー
代理人
弁理士法人サトー
主分類
H04L
43/0864 20220101AFI20250117BHJP(電気通信技術)
要約
【課題】RTTを適切に推定する。
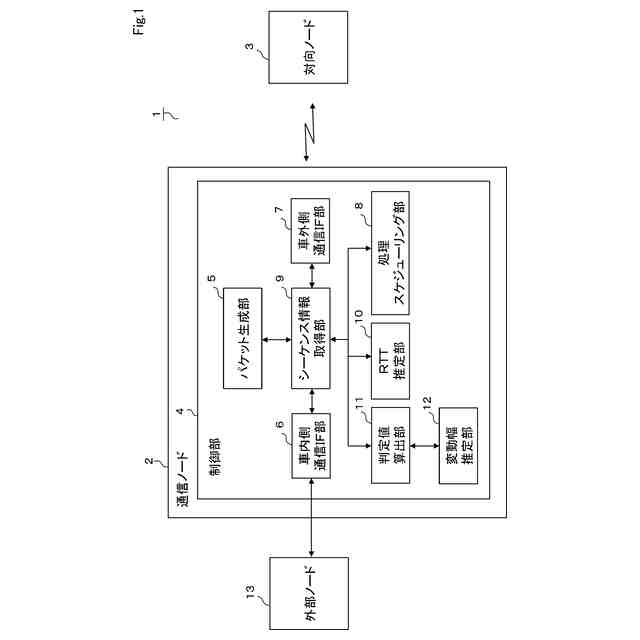
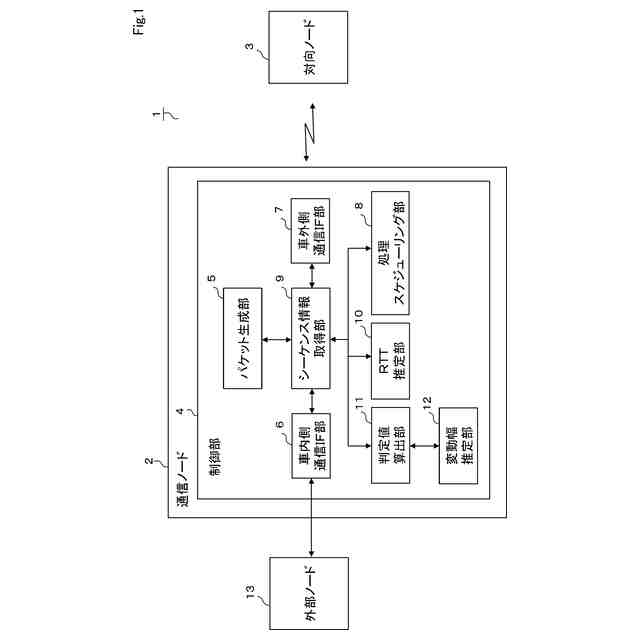
【解決手段】通信装置2は、通信パケットを対向装置へ送信し、通信パケットに対する送達確認パケットを対向装置から受信する。通信装置は、通信パケット及び送達確認パケットのシーケンス情報を取得するシーケンス情報取得部9と、シーケンス情報取得部の取得結果により、少なくとも1つの通信パケットの送信時刻と、1つの送達確認パケットの受信時刻と、別の通信パケットの送信時刻又は別の送達確認パケットの受信時刻のうちの何れかとの3つの時刻に基づいてRTTを推定するRTT推定部10と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
通信パケットを対向装置へ送信し、前記通信パケットに対する送達確認パケットを前記対向装置から受信する通信装置(2)であって、
前記通信パケット及び前記送達確認パケットのシーケンス情報を取得するシーケンス情報取得部(9)と、
前記シーケンス情報取得部の取得結果により、少なくとも1つの前記通信パケットの送信時刻と、1つの前記送達確認パケットの受信時刻と、別の前記通信パケットの送信時刻又は別の前記送達確認パケットの受信時刻のうちの何れかとの3つの時刻に基づいてラウンドトリップタイムを推定するラウンドトリップタイム推定部(10)と、を備える通信装置。
続きを表示(約 2,000 文字)
【請求項2】
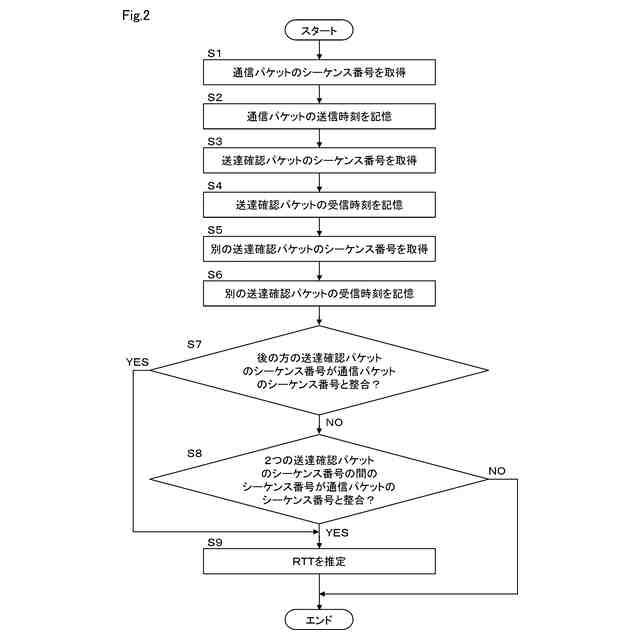
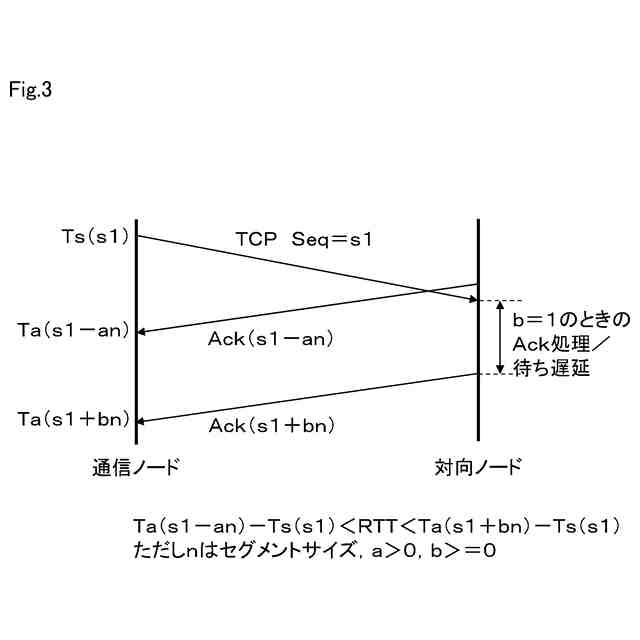
前記ラウンドトリップタイム推定部は、1つの通信パケットの送信後に2つの送達確認パケットが受信されていることを条件とし、後の方の前記送達確認パケットのシーケンス情報が前記通信パケットのシーケンス情報と整合している場合、又は2つの前記送達確認パケットのシーケンス情報の間のシーケンス情報が前記通信パケットのシーケンス情報と整合している場合に、1つの通信パケットの送信時刻と、2つの送達確認パケットの受信時刻に基づいて前記ラウンドトリップタイムを推定する請求項1に記載した通信装置。
【請求項3】
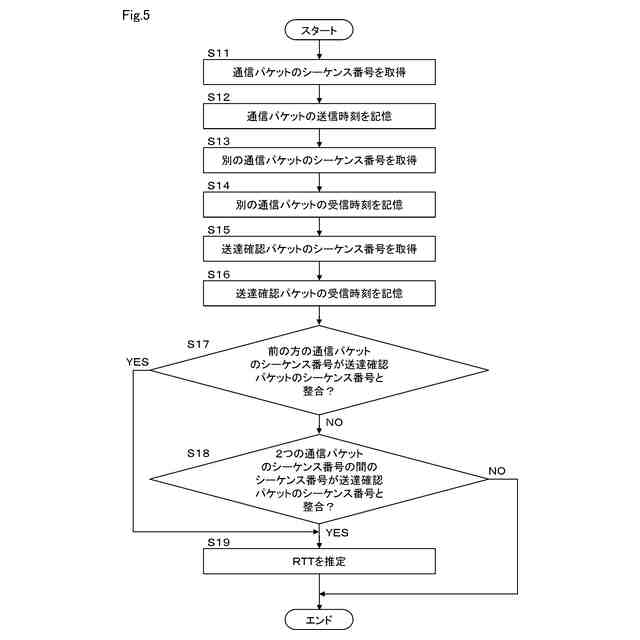
前記ラウンドトリップタイム推定部は、2つの通信パケットの送信後に1つの送達確認パケットが受信されていることを条件とし、前の方の前記通信パケットのシーケンス情報が前記送達確認パケットのシーケンス情報と整合している場合、又は2つの前記通信パケットのシーケンス情報の間のシーケンス情報が前記送達確認パケットのシーケンス情報と整合している場合に、2つの通信パケットの送信時刻と、1つの送達確認パケットの受信時刻に基づいて前記ラウンドトリップタイムを推定する請求項1に記載した通信装置。
【請求項4】
パケットを生成するパケット生成部(5)を備え、
前記シーケンス情報取得部は、前記パケット生成部により生成された前記通信パケットのシーケンス情報を取得する請求項1に記載した通信装置。
【請求項5】
外部装置から前記通信パケットを受信するパケット受信部(6)を備え、
前記シーケンス情報取得部は、前記外部装置から前記パケット受信部により受信された前記通信パケットのシーケンス情報を取得する請求項1に記載した通信装置。
【請求項6】
前記通信パケット及び前記送達確認パケットの処理をスケジューリングするスケジューリング部(8)を備え、
前記シーケンス情報取得部は、前記処理スケジューリング部により処理がスケジューリングされた前記通信パケット及び前記送達確認パケットのシーケンス情報を取得する請求項1に記載した通信装置。
【請求項7】
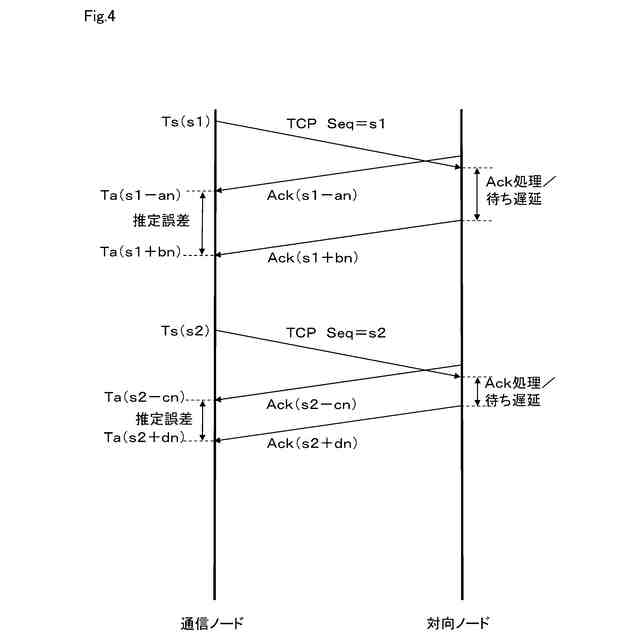
前記ラウンドトリップタイム推定部は、所定の測定期間における複数のサンプルを対象としてサンプル毎の前記ラウンドトリップタイムの上限と下限との差を推定誤差として算出し、その算出した推定誤差が相対的に小さいサンプルを対象としてラウンドトリップタイムを推定する請求項1から6の何れか一項に記載した通信装置。
【請求項8】
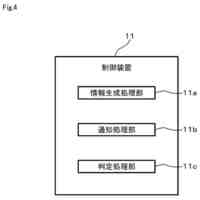
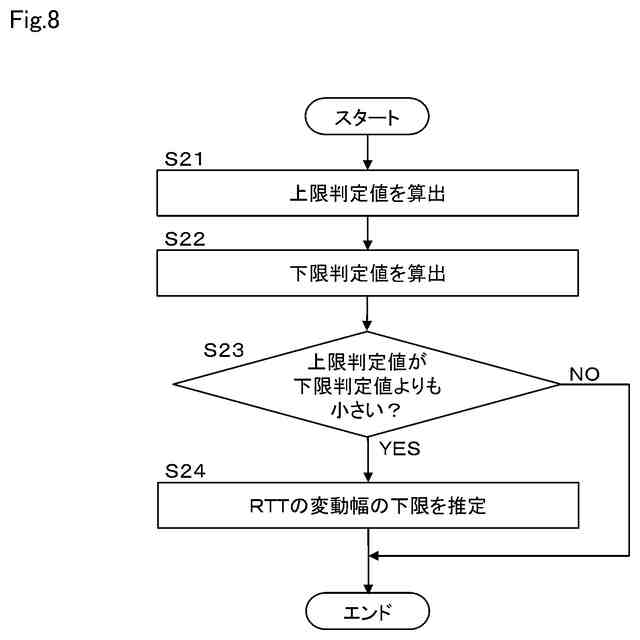
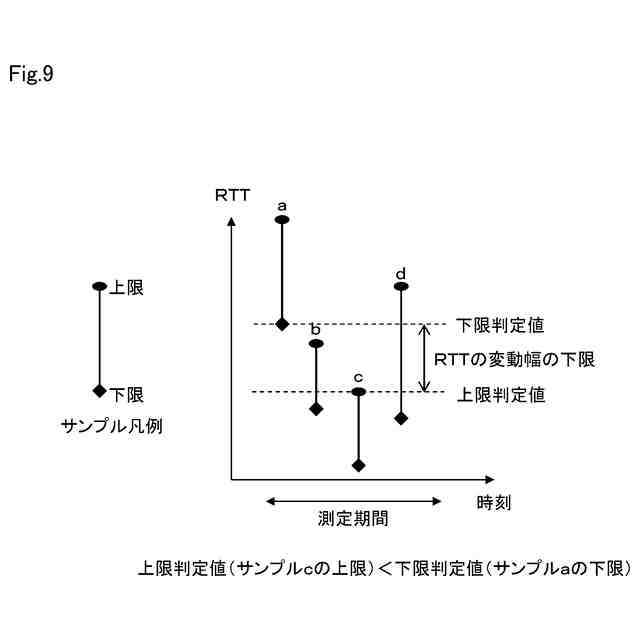
所定の測定期間における複数のサンプルを対象としてサンプル毎の前記ラウンドトリップタイムの上限及び下限を算出し、その算出した複数の上限のうちの最小値を上限判定値として算出すると共に複数の下限のうちの最大値を下限判定値として算出する判定値算出部(11)と、
前記判定値算出部により算出された前記上限判定値が前記下限判定値よりも小さい場合に、当該上限判定値と当該下限判定値との差をラウンドトリップタイムの変動幅の下限として推定する変動幅推定部(12)と、を備える請求項1から6の何れか一項に記載した通信装置。
【請求項9】
通信パケットを対向装置へ送信し、前記通信パケットに対する送達確認パケットを前記対向装置から受信する通信装置(2)において、
前記通信パケットのシーケンス情報を取得する第1情報取得手順と、
前記送達確認パケットのシーケンス情報を取得する第2情報取得手順と、
前記第1情報取得手順の取得結果及び前記第2情報取得手順の取得結果により、少なくとも1つの前記通信パケットの送信時刻と、1つの前記送達確認パケットの受信時刻と、別の前記通信パケットの送信時刻又は別の前記送達確認パケットの受信時刻のうちの何れかとの3つの時刻に基づいてラウンドトリップタイムを推定する推定手順と、を行うラウンドトリップタイムの推定方法。
【請求項10】
通信パケットを対向装置へ送信し、前記通信パケットに対する送達確認パケットを前記対向装置から受信する通信装置(2)の制御部(4)に、
前記通信パケットのシーケンス情報を取得する第1情報取得手順と、
前記送達確認パケットのシーケンス情報を取得する第2情報取得手順と、
前記第1情報取得手順の取得結果及び前記第2情報取得手順の取得結果により、少なくとも1つの前記通信パケットの送信時刻と、1つの前記送達確認パケットの受信時刻と、別の前記通信パケットの送信時刻又は別の前記送達確認パケットの受信時刻のうちの何れかとの3つの時刻に基づいてラウンドトリップタイムを推定する推定手順と、を実行させるラウンドトリップタイムの推定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、通信装置、ラウンドトリップタイムの推定方法及びラウンドトリップタイムの推定プログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
パケット通信において、通信装置は、通信パケットを対向装置へ送信し、対向装置は、通信装置から通信パケットを受信すると、通信パケットに対する送達確認パケットを通信装置へ送信する。例えば特許文献1には、通信装置から対向装置へ送信された通信パケットのシーケンス情報と、対向装置から通信装置へ送信された送達確認パケットのシーケンス情報とが整合した場合に、通信パケットの送信時刻と送達確認パケットの受信時刻とに基づいてラウンドトリップタイム(以下、RTT(Round-Trip Time)と称する場合がある)を推定する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
米国特許第11516098号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されている手法では、通信パケットのシーケンス情報と整合する送達確認パケットを特定するために、そのシーケンス情報が整合する送達確認パケットの前後を含む複数の送達確認パケットのシーケンス情報を判定する必要がある。そのため、処理負荷が増大する問題がある。又、通信パケットのシーケンス情報と整合する送達確認パケットを特定しても、その送達確認パケットが遅延パケットや複製パケットであると、RTTの推定精度が低下する問題もある。
【0005】
本発明は、上記した事情に鑑みてなされたものであり、その目的は、ラウンドトリップタイムを適切に推定することができる通信装置、ラウンドトリップタイムの推定方法及びラウンドトリップタイムの推定プログラムを提供することにある。
【課題を解決するための手段】
【0006】
請求項1に記載した発明によれば、通信パケットを対向装置へ送信し、前記通信パケットに対する送達確認パケットを前記対向装置から受信する。シーケンス情報取得部(9)は、前記通信パケット及び前記送達確認パケットのシーケンス情報を取得する。ラウンドトリップタイム推定部(10)は、前記シーケンス情報取得部の取得結果により、少なくとも1つの前記通信パケットの送信時刻と、1つの前記送達確認パケットの受信時刻と、別の前記通信パケットの送信時刻又は別の前記送達確認パケットの受信時刻のうちの何れかとの3つの時刻に基づいてラウンドトリップタイムを推定する。
【0007】
少なくとも1つの通信パケットの送信時刻と、1つの送達確認パケットの受信時刻と、別の通信パケットの送信時刻又は別の送達確認パケットの受信時刻のうちの何れかとの3つの時刻に基づいてラウンドトリップタイムを推定するようにした。シーケンス情報が整合する送達確認パケットの前後を含む複数の送達確認パケットのシーケンス情報を判定する必要がなく、処理負荷の増大を回避することができる。通信パケットのシーケンス情報と整合する送達確認パケットを特定する必要もなく、RTTの推定精度の低下も回避することができる。処理負荷の増大の回避と推定精度の低下の回避を両立させることができ、ラウンドトリップタイムを適切に推定することができる。
【図面の簡単な説明】
【0008】
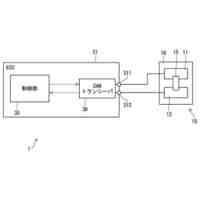
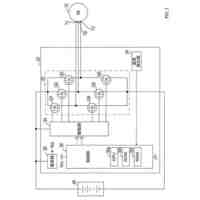
一実施形態の全体構成を示す機能ブロック図
第1手法によるRTTの推定処理を示すフローチャート
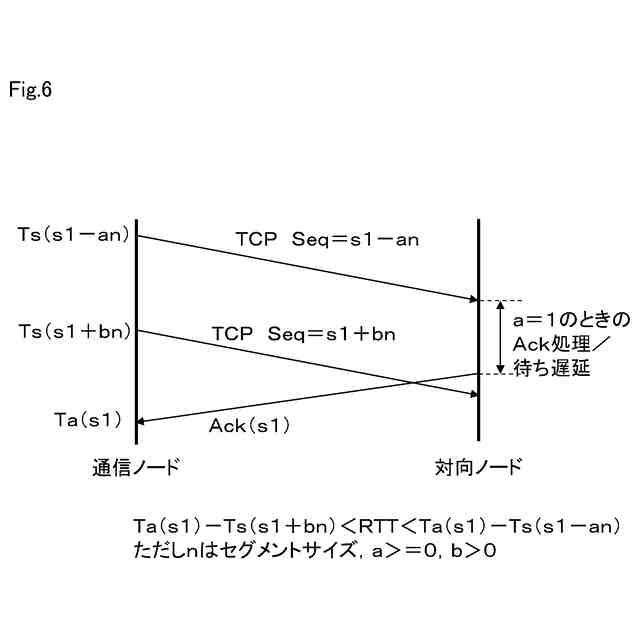
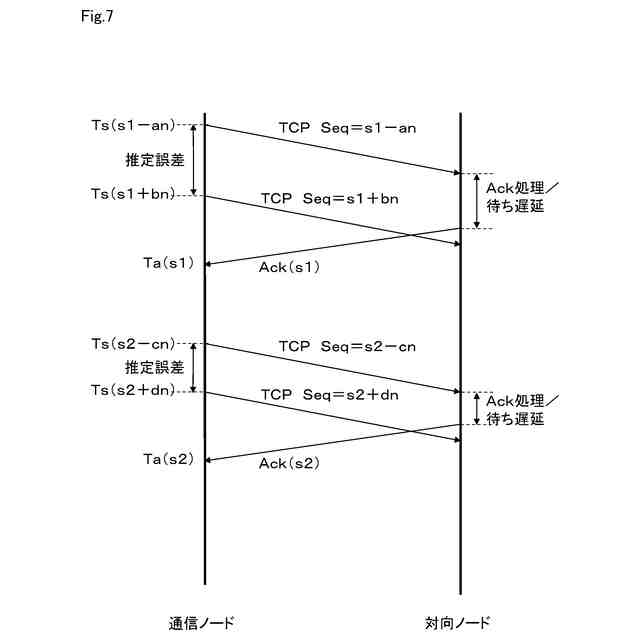
第1手法によるRTTの推定処理を説明する図
第1手法によるRTTの推定処理を説明する図
第2手法によるRTTの推定処理を示すフローチャート
第2手法によるRTTの推定処理を説明する図
第2手法によるRTTの推定処理を説明する図
RTT変動幅の下限の推定処理を示すフローチャート
RTT変動幅の下限の推定処理を説明する図
RTT変動幅の下限の推定処理を説明する図
【発明を実施するための形態】
【0009】
以下、本発明を、例えば車両に搭載される通信ノードに適用した実施形態について図面を参照して説明する。図1に示すように、通信システム1は、通信ノード2(通信装置に相当する)と対向ノード3(対向装置に相当する)とが無線回線を介してデータ通信可能に構成されている。通信ノード2と対向ノード3との間で行うデータ通信は、TCP/IP(Transmission Control Protocol/Internet Protocol)の通信プロトコルに準拠したデータ通信である。通信ノード2は、通信パケットを無線回線を介して対向ノード3へ送信する。対向ノード3は、通信ノード2から通信パケットを受信すると、その受信した通信パケットに対する送達確認パケットを無線回線を介して通信ノード2へ送信する。尚、通信ノード2と対向ノード3とが基地局を中継してデータ通信可能に構成され、通信ノード2と基地局とが無線回線を介してデータ通信を行い、対向ノード3と基地局とが有線回線を介してデータ通信を行う構成でも良い。
【0010】
通信ノード2は、例えば車速、加減速、急旋回、走行経路、燃費等の走行制御に関する走行制御データを対向ノード3へ送信する。対向ノード3は、複数の通信ノード2と無線回線を介してデータ通信可能であり、例えば不特定多数の車両を対象として走行制御データを統計処理する機能を有するサーバである。対向ノード3は、不特定多数の車両に搭載されている各通信ノード2から走行制御データを受信すると、その受信した走行制御データを統計処理する。尚、通信ノード2と対向ノード3との間で送受信されるデータは上記した走行制御データ以外のデータでも良く、他の用途に利用されるデータでも良い。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
熱交換器
11日前
株式会社デンソー
光学部材
5日前
株式会社デンソー
検出装置
11日前
株式会社デンソー
測距装置
5日前
株式会社デンソー
駆動装置
5日前
株式会社デンソー
駆動装置
5日前
株式会社デンソー
半導体装置
15日前
株式会社デンソー
半導体装置
15日前
株式会社デンソー
半導体装置
15日前
株式会社デンソー
半導体装置
15日前
株式会社デンソー
半導体装置
15日前
株式会社デンソー
半導体装置
15日前
株式会社デンソー
輻射ヒータ
4日前
株式会社デンソー
物体検知装置
6日前
株式会社デンソー
電力変換装置
11日前
株式会社デンソー
潅水システム
11日前
株式会社デンソー
信号処理装置
5日前
株式会社デンソー
電子制御装置
11日前
株式会社デンソーテン
電源制御装置
12日前
株式会社デンソー
スパークプラグ
11日前
株式会社デンソー
モータ駆動装置
5日前
株式会社デンソー
電池モジュール
5日前
株式会社デンソー
基板支持構造体
11日前
株式会社デンソー
コンデンサ装置
12日前
株式会社デンソー
蓄放熱システム
11日前
株式会社デンソー
基板支持構造体
11日前
株式会社デンソー
信号伝送デバイス
11日前
株式会社デンソー
半導体モジュール
15日前
株式会社デンソー
信号伝送デバイス
11日前
株式会社デンソー
ガスバリア被膜体
12日前
株式会社デンソー
半導体モジュール
15日前
株式会社デンソーウェーブ
空調コントローラ
15日前
株式会社デンソーウェーブ
流通管理システム
5日前
株式会社デンソー
障害物通知システム
12日前
株式会社デンソー
巻線界磁型回転電機
5日前
株式会社デンソー
巻線界磁型回転電機
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ