TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025005754
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023106085
出願日
2023-06-28
発明の名称
移動体管理システム及び移動体管理方法
出願人
株式会社日立製作所
代理人
弁理士法人第一国際特許事務所
主分類
G05D
1/43 20240101AFI20250109BHJP(制御;調整)
要約
【課題】本発明では、移動体の計画経路と実走行の経路に差が発生しても、予定外の走行の揺らぎによって生じる経路の競合を回避可能な技術を提供することを目的とする。
【解決手段】本発明の移動体管理システムは、記憶部に、所定のエリアで移動する移動体に関する実走経路を示す実走経路情報と、前記実走経路の前提となった最適経路を示す最適経路情報と、所定のエリアにおける障害物の位置を示す地図情報を含んでいる。
そして、メモリには、前記実走経路情報と前記最適経路情報に基づいて、前記実走経路情報と前記最適経路の差分である経路の予実差を算出し、予実差モデルを生成する予実差学習部、前記予実差モデルに基づいて、走行可能経路を予測する走行可能経路予測部、
入力された確率閾値に基づいて、前記確率閾値に応じた経路の競合を回避する経路を算出する確率閾値決定部としてプロセッサを機能させるための処理命令を含んでいる。
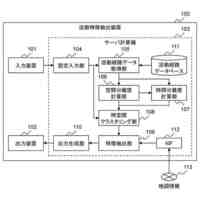
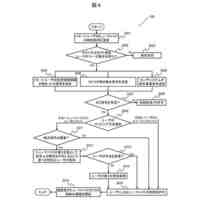
【選択図】図4
特許請求の範囲
【請求項1】
移動体管理システムであって、
プロセッサとメモリと記憶部とを備え、
前記記憶部は、
所定のエリアで移動する移動体に関する実走経路を示す実走経路情報と、前記実走経路の前提となった最適経路を示す最適経路情報と、
所定のエリアにおける障害物に関する情報を含み、
前記メモリは、
前記実走経路情報と前記最適経路情報に基づいて、前記実走経路情報と前記最適経路の差分である経路の予実差を算出し、予実差モデルを生成する予実差学習部、
前記予実差モデルに基づいて、走行可能経路を予測する走行可能経路予測部、
入力された確率閾値に基づいて、前記確率閾値に応じた経路の競合を回避する経路を算出する確率閾値決定部
として前記プロセッサを機能させるための処理命令を含むことを特徴とする移動体管理システム。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の移動体管理システムにおいて、
前記メモリは、
前記確率閾値決定部において選択された走行可能経路を動的障害物として登録する動的障害物情報管理部を備えることを特徴とする移動体管理システム。
【請求項3】
請求項2に記載の移動体管理システムにおいて、
前記予実差学習部は、算出した経路の予実差を統計学習することによって、予実差モデルを生成することを特徴とする移動体管理システム。
【請求項4】
請求項3に記載の移動体管理システムにおいて、
前記走行可能経路予測部は、前記予実差モデルを用いて走行可能経路予測を行い、走行可能経路及び走行可能経路の確率閾値を算出することを特徴とする移動体管理システム。
【請求項5】
請求項4に記載の移動体管理システムにおいて、
前記移動体管理システムは表示装置を備え、
前記表示装置には、走行可能経路の領域と確率閾値が連動して表示されることを特徴とする移動体管理システム。
【請求項6】
請求項5に記載の移動体管理システムにおいて、
前記メモリは、
過去の作業データから、確率閾値ごとに、移動体が一つのタスクを開始してから終了までの時間を集計し、平均作業時間を計算する作業データ保存部と、
作業タスクに示されたタスク数に平均作業時間を乗じて、確率閾値毎の予想作業時間を算出する作業時間算出部を備え、
与えられた作業タスクとタスク終了までの目標時間から、好ましい確率閾値を提示することを特徴とする移動体管理システム。
【請求項7】
請求項1に記載の移動体管理システムにおいて、
前記移動体管理システムは、最適経路探索部を備えており、
前記最適経路探索部が、前記障害物に関する情報を参照して最適経路を探査する工程と、
前記走行可能経路予測部が、予実差モデルに基づき、走行可能経路を予測する工程と、
前記走行可能経路を以降に走行する移動体に対する動的障害物として認識する工程
を備える移動体管理方法。
【請求項8】
請求項7に記載の移動体管理方法において、
前記移動体管理システムは、
過去の作業データから、確率閾値ごとに、移動体が一つのタスクを開始してから終了までの時間を集計し、平均作業時間を計算する作業データ保存部と、
作業タスクに示されたタスク数に平均作業時間を乗じて、各確率閾値毎の予想作業時間を算出する作業時間算出部を備えており、
前記作業時間算出部が、与えられた作業タスクとタスク終了までの目標時間から、最適な確率閾値を提示する工程を備える
ことを特徴とする移動体管理方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体管理システム及び移動体管理方法に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
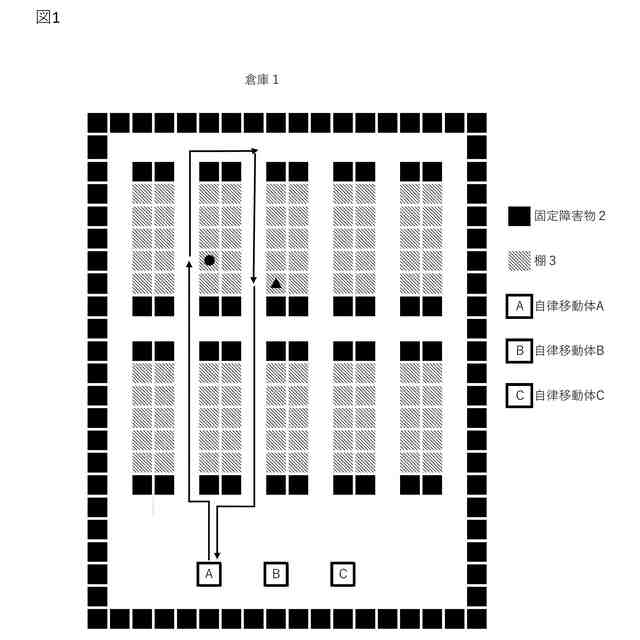
倉庫内等において、複数のロボットや人などの移動体が倉庫内を移動してピッキングタスクを行うことが行われており、その際に、他のロボットや人などが移動の障害物となることがある。
このため、ロボットや人が互いに衝突せず、効率的にピッキング作業等を行うためには、合理的な移動ルートを選択することが重要である。
このような、ロボットや人などの移動体の存在位置が動的に変化する環境下において、ロボットや人などの複数の移動体の運用を最適化する技術として、それぞれの移動体に移動ルートを含めた作業タスクを動的に割り当てる技術が開発されている。
また、複数のロボット、人などの移動体が移動しながら作業するフィールドでは、作業スペースや、移動ルードなどのリソース競合が発生しやすく、作業効率に悪影響をもたらしているため、リソース競合を解消できる協調的な経路最適化が必要となっている。
【0003】
例えば、特許文献1においては、「自律移動体が走行するルートの制約を低減して最短距離のルートを設定可能とし、複数台の自律移動体が同時に走行しても衝突や渋滞が生じないようにするために、自律移動体1は、無線伝送路を通してワークWの荷積み場所および荷降し場所が指示されると荷積み場所から荷降し場所までのルートを含む走行計画を立案し、ワークWの搬送の指示を受けると立案したルートに従ってワークWを搬送する。
そして集中制御装置4は、複数台の自律移動体1と無線伝送路を通して通信可能であって各自律移動体1の位置を取得するとともに、ワークWを搬送しておらずかつ荷積み場所にもっとも近い自律移動体1に荷積み場所と荷降し場所とを通知してルートを立案させる。
また、集中制御装置4は、各自律移動体1の立案したルートの関係を評価し各自律移動体1のルート間で干渉を生じる可能性があるときには自律移動体1に走行計画を再立案させる」技術が開示されている。
【0004】
さらに、特許文献2においては、「ナビゲーション空間内の複数のロボットのロケーションをトラッキングするように構成されたロボット監視サーバと、ロボット監視サーバと通信している複数のロボットとを備える、ロボット渋滞管理のためのシステム及び方法が開示されている。ここで、各ロボットは、プロセッサとメモリとを備え、メモリは、プロセッサによって実行されたとき、自律型ロボットに、ロボットに割り当てられた作業リストから、第1の作業に対応する第1のポーズ・ロケーションを決定することと、ロボット監視サーバから、第1のポーズ・ロケーションに関連付けられた渋滞情報を受信することと、渋滞情報によって示された第1のポーズ・ロケーションの渋滞した状態を識別することと、渋滞した状態の識別に応答して、作業リストから第2の作業を選択することと、第2の作業に対応する第2のポーズ・ロケーションにナビゲートすることとを行わせる命令を格納する」技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2005-242489号公報
特表2022-519054号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ある移動体の経路を計画する際に、他の移動体の予定経路を時間軸上に動的障害物として登録しておき、これを回避できるように計画経路を探索し生成することは従来から行われている。しかし、実際の運用においては、移動体の制御の精度による計画経路からのズレ、移動体が現場において自律的に障害物を検知することによる計画経路からのズレなどによって、移動体が予定していた計画経路から外れて走行することに起因して、走行の揺らぎが発生し、新たな競合(渋滞またはデッドロック)の原因となることがある。
【0007】
特許文献1においては、複数の移動体の経路計画と、経路競合の回避を検討しているものの、実走行の揺らぎによって生じる競合については考慮されていない。
また、特許文献2においては、渋滞発生後に渋滞の影響拡大を抑止するために、ロボット監視サーバが、各ロボットに対してナビゲーションルール及びナビゲーションパラメータを更新するなどの対応を行うものの、渋滞の発生を防ぐことはできす、事後的に渋滞の影響拡大を抑止するという効果に留まる。
そこで、本発明では、移動体の計画経路と実走行の経路に差が発生しても、予定外の走行の揺らぎによって生じる経路の競合を回避可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、代表的な本発明のロボット移動管理システムの一つは、
プロセッサとメモリと記憶部とを備え、前記記憶部は、所定のエリアで移動する移動体に関する実走経路を示す実走経路情報と、前記実走経路の前提となった最適経路を示す最適経路情報と、所定のエリアにおける障害物に関する情報として、固定障害物の位置を示す地図情報を含むことができる。
そして、前記メモリは、前記実走経路情報と前記最適経路情報に基づいて、前記実走経路情報と前記最適経路の差分である経路の予実差(以下、「経路予実差」ということがある。)を算出し、予実差モデルを生成する予実差学習部、前記予実差モデルに基づいて、走行可能経路を予測する走行可能経路予測部、入力された確率閾値に基づいて、前記確率閾値に応じた経路の競合を回避する経路を算出する確率閾値決定部として前記プロセッサを機能させるための処理命令を含むことができる。
【発明の効果】
【0009】
本発明によれば、移動体の計画経路と実走行の経路に差が発生しても、予定外の走行の揺らぎによって生じる経路の競合を回避可能な技術を提供することができる。
上記した以外の課題、構成および効果は、以下の発明を実施をするための形態における説明により明らかにされる。
【図面の簡単な説明】
【0010】
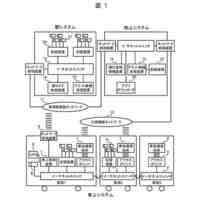
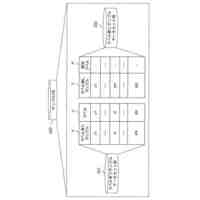
図1は、本開示の実施形態を説明するための倉庫と自律移動体の一例を示す模式図である。
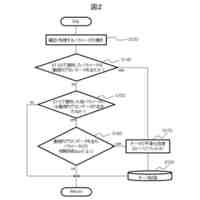
図2は、本開示の実施形態を説明するための作業タスクの一例である。
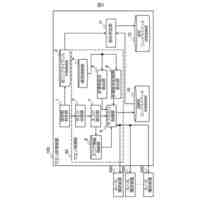
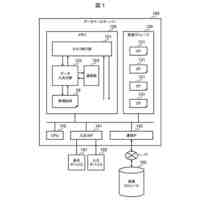
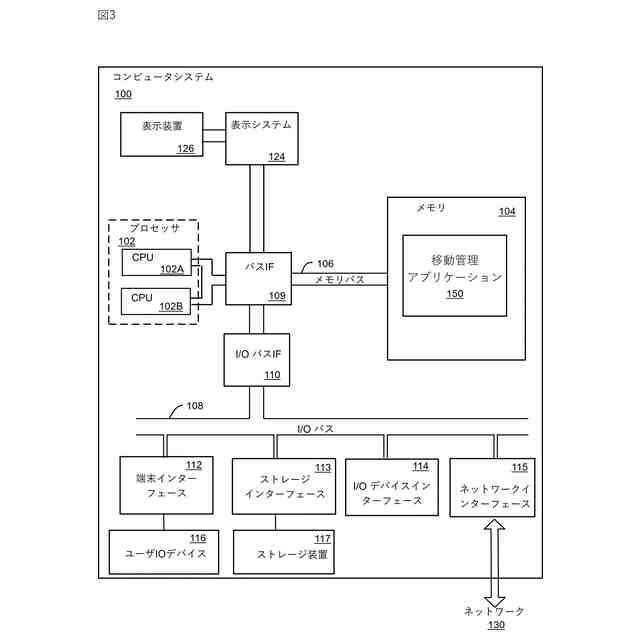
図3は、本開示の実施形態を実施するためのコンピュータシステムを示す図である。
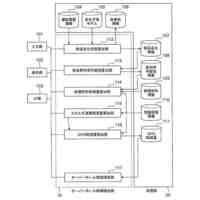
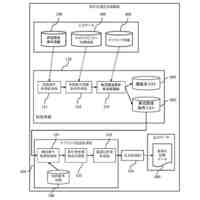
図4は、本開示の実施形態に係る移動体管理システム構成の一例を示す図である。
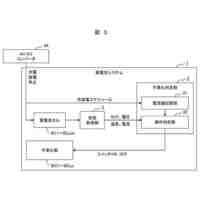
図5は、本開示の実施形態に係る最適経路探索部における処理の流れの一例を示す図である。
図6は、本開示の実施形態に係る移動体制御部の処理の流れの一例を示す図である。
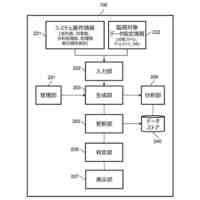
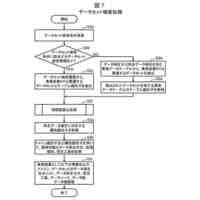
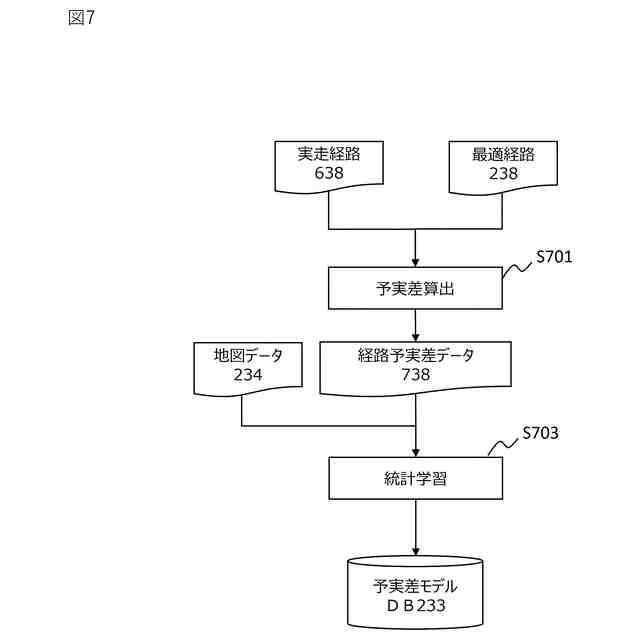
図7は、本開示の実施形態に係る予実差学習部の処理の流れの一例を示す図である。
図8は、本開示の実施形態に係る走行可能経路予測部処理の流れの一例を示す図である。
図9は、本開示の実施形態に係る確率閾値決定部の処理の流れの一例を示す図である。
図10は、本開示の実施形態に係る動的障害物情報管理部の一例を示す図である。
図11は、本開示の実施形態に係る全体フローの一例を示す図である。
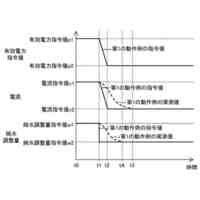
図12は、本開示の実施形態に係る経路表示と確率閾値入力した場合の表示の一例を示す図である。
図13は、本開示の実施形態に係る経路表示と確率閾値入力した場合の表示の一例を示す図である。
図14は、本開示の実施形態に係る経路表示と確率閾値入力した場合の表示の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
制御装置
4日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
電力変換装置
17日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
放射線モニタ
16日前
株式会社日立製作所
設計支援装置
17日前
株式会社日立製作所
スクリュー圧縮機
16日前
株式会社日立製作所
電磁波処理システム
12日前
株式会社日立製作所
タスク管理システム
16日前
株式会社日立製作所
位置推定システムおよび方法
16日前
株式会社日立製作所
オーバーホール計画作成装置
9日前
株式会社日立製作所
電力系統監視装置および方法
9日前
株式会社日立製作所
蓄電池の制御方法及び制御装置
16日前
株式会社日立製作所
情報処理装置及び情報処理方法
16日前
株式会社日立製作所
蓄電池システム及びその制御方法
2日前
株式会社日立製作所
充電管理装置および充電管理方法
11日前
株式会社日立製作所
クエリ処理装置及びクエリ処理方法
12日前
株式会社日立製作所
発想支援システム及び発想支援方法
16日前
株式会社日立製作所
データ処理装置及びデータ処理方法
12日前
株式会社日立製作所
情報照会システム及び情報照会方法
11日前
株式会社日立製作所
塩基検出用長鎖ssDNAプライマー
10日前
株式会社日立製作所
データ処理システム及びデータ処理方法
16日前
株式会社日立製作所
生成支援プログラムおよび生成支援装置
2日前
株式会社日立製作所
データ統合方法及びデータ統合システム
10日前
株式会社日立製作所
活動特徴抽出装置、及び活動特徴抽出方法
11日前
株式会社日立製作所
分析装置、分析方法および分析プログラム
11日前
株式会社日立製作所
設定装置、設定方法、および設定プログラム
9日前
株式会社日立製作所
取引先選定支援装置、及び取引先選定支援方法
9日前
株式会社日立製作所
テレイグジスタンスの実施方法およびシステム
16日前
株式会社日立製作所
水電解システムの制御方法及び水電解システム
10日前
株式会社日立製作所
エレベーターシステム及びエレベーター制御方法
10日前
株式会社日立製作所
情報処理装置、情報処理システム及び情報処理方法
3日前
株式会社日立製作所
多層樹脂配管、水電解システム、及び水素の移送方法
12日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ