TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024177219
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2024168700,2023178830
出願日
2024-09-27,2020-12-09
発明の名称
運転制御装置およびHMI制御装置
出願人
株式会社デンソー
代理人
弁理士法人ゆうあい特許事務所
主分類
B60W
50/14 20200101AFI20241212BHJP(車両一般)
要約
【課題】自動運転終了による運転レベルの移行に向けたドライバの意識付けを良好に行う。
【解決手段】HMI制御装置(25)は、運転レベル取得部(253)と表示制御部(255)とを備える。運転レベル取得部は、車両の運転を制御する運転制御装置(18)における運転自動化の実施の有無を含む実施状態に対応する運転レベルの決定結果を取得する。表示制御部は、運転レベル取得部にて取得した運転レベルに応じて、HMI装置(20)における画像表示動作を制御する。表示制御部は、自動運転に含まれる高レベルを終了して、ドライバ状態として高レベルよりも低レベルの運転レベルを実行可能な低レベル対応状態をドライバに取らせる動作指示表示を、HMI装置にて表示させ、中レベルの運転レベルを実行可能な中レベル対応状態をドライバに取らせる動作指示表示を行う。
【選択図】図2
特許請求の範囲
【請求項1】
自動運転可能な車両(1)のドライバにより視認可能に画像表示するHMI装置(20)を制御するように構成された、HMI制御装置(25)であって、
前記車両の運転を制御する運転制御装置(18)における運転自動化の実施の有無を含む実施状態に対応する運転レベルの決定結果を取得する、運転レベル取得部(253)と、
前記運転レベル取得部にて取得した前記運転レベルに応じて、前記HMI装置における画像表示動作を制御する、表示制御部(255)と、
を備え、
前記表示制御部は、前記自動運転に含まれる前記運転レベルである高レベルを終了して、前記ドライバの状態であるドライバ状態として前記高レベルよりも低レベルの前記運転レベルを実行可能な低レベル対応状態を前記ドライバに取らせる動作指示表示を、前記HMI装置にて表示させ、前記高レベルと前記低レベルとの間の運転レベルである中レベルの前記運転レベルを実行可能な中レベル対応状態を前記ドライバに取らせる動作指示表示を行う、
HMI制御装置。
続きを表示(約 510 文字)
【請求項2】
自動運転可能な車両(1)のドライバにより視認可能に画像表示するHMI装置(20)を制御するように構成されたHMI制御装置(25)により実行される、HMI制御プログラムであって、
前記HMI制御装置により実行される処理は、
前記車両の運転を制御する運転制御装置(18)における運転自動化の実施の有無を含む実施状態に対応する運転レベルの決定結果を取得する、運転レベル取得処理と、
前記運転レベル取得処理にて取得した前記運転レベルに応じて、前記HMI装置における画像表示動作を制御する、表示制御処理と、
を含み、
前記表示制御処理は、前記自動運転に含まれる前記運転レベルである高レベルを終了して、前記ドライバの状態であるドライバ状態として前記高レベルよりも低レベルの前記運転レベルを実行可能な低レベル対応状態を前記ドライバに取らせる動作指示表示を、前記HMI装置にて表示させ、前記高レベルと前記低レベルとの間の運転レベルである中レベルの前記運転レベルを実行可能な中レベル対応状態を前記ドライバに取らせる動作指示表示を行う、
HMI制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転可能な車両の運転を制御する運転制御装置、および、当該車両に搭載されるHMI装置を制御するHMI制御装置に関する。HMIはヒューマン マシン インタフェースの略である。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
自動車等の車両における自動運転システムが種々提案されている(例えば特許文献1等参照)。自動運転中においては、車両における運転席乗員であるドライバは、セカンドタスクを自由に実行することが可能となる。セカンドタスクとは、ドライバが実行する、運転操作以外のタスクである。具体的には、セカンドタスクには、例えば、携帯端末操作、映像コンテンツ視聴、等が含まれる。セカンドタスクは、「運転外タスク」あるいは「セカンダリーアクティビティ」とも称される。
【先行技術文献】
【特許文献】
【0003】
特開2017-107502号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動運転は、例えば、自動運転が許可された所定の道路区間の終了等により、終了することがある。自動運転が終了する際には、車両運動制御および/または運転環境監視に関し、ドライバに対する権限移譲が必要となる。
【0005】
一方、自動運転中にセカンドタスクを実行中のドライバは、自車両の運転状態および運転環境から、意識が離れている。このため、権限移譲をスムーズに行うためには、ドライバの自動運転終了に向けた意識付けを良好に行うことが求められる。本発明は、上記に例示した事情等に鑑みてなされたものである。すなわち、本発明は、例えば、自動運転終了による運転自動化レベルの移行に向けたドライバの意識付けを良好に行うことを可能とする技術を提供する。
【課題を解決するための手段】
【0006】
HMI制御装置(25)は、自動運転可能な車両(1)のドライバにより視認可能に画像表示するHMI装置(20)を制御するように構成されている。
請求項1に記載のHMI制御装置は、
前記車両の運転を制御する運転制御装置(18)における運転自動化の実施の有無を含む実施状態に対応する運転レベルの決定結果を取得する、運転レベル取得部(253)と、
前記運転レベル取得部にて取得した前記運転レベルに応じて、前記HMI装置における画像表示動作を制御する、表示制御部(255)と、
を備え、
前記表示制御部は、前記自動運転に含まれる前記運転レベルである高レベルを終了して、前記ドライバの状態であるドライバ状態として前記高レベルよりも低レベルの前記運転レベルを実行可能な低レベル対応状態を前記ドライバに取らせる動作指示表示を、前記HMI装置にて表示させ、前記高レベルと前記低レベルとの間の運転レベルである中レベルの前記運転レベルを実行可能な中レベル対応状態を前記ドライバに取らせる動作指示表示を行う。
HMI制御プログラムは、自動運転可能な車両(1)のドライバにより視認可能に画像表示するHMI装置(20)を制御するように構成されたHMI制御装置(25)により実行される、コンピュータ読み取り可能なプログラムである。
請求項2に記載のHMI制御プログラムは、
前記HMI制御装置により実行される処理として、
前記車両の運転を制御する運転制御装置(18)における運転自動化の実施の有無を含む実施状態に対応する運転レベルの決定結果を取得する、運転レベル取得処理と、
前記運転レベル取得処理にて取得した前記運転レベルに応じて、前記HMI装置における画像表示動作を制御する、表示制御処理と、
を含み、
前記表示制御処理は、前記自動運転に含まれる前記運転レベルである高レベルを終了して、前記ドライバの状態であるドライバ状態として前記高レベルよりも低レベルの前記運転レベルを実行可能な低レベル対応状態を前記ドライバに取らせる動作指示表示を、前記HMI装置にて表示させ、前記高レベルと前記低レベルとの間の運転レベルである中レベルの前記運転レベルを実行可能な中レベル対応状態を前記ドライバに取らせる動作指示表示を行う。
【0007】
なお、出願書類中の各欄において、各要素に括弧付きの参照符号が付されている場合がある。この場合、参照符号は、単に、同要素と後述する実施形態に記載の具体的構成との対応関係の一例を示すものであるにすぎない。よって、本発明は、参照符号の記載によって、何ら限定されるものではない。
【図面の簡単な説明】
【0008】
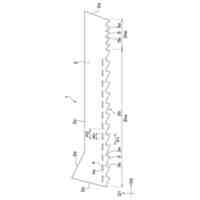
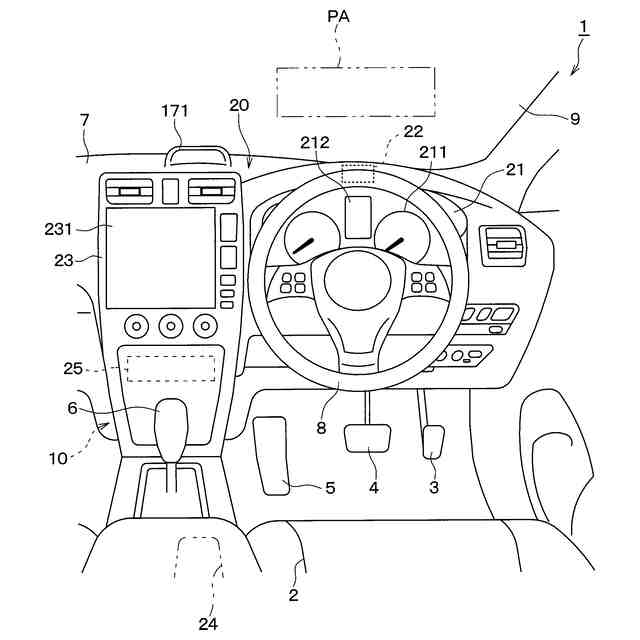
運転制御装置およびHMI制御装置を含む車載システムを搭載した車両における車室内部の外観を示す概略図である。
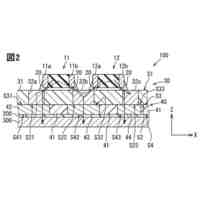
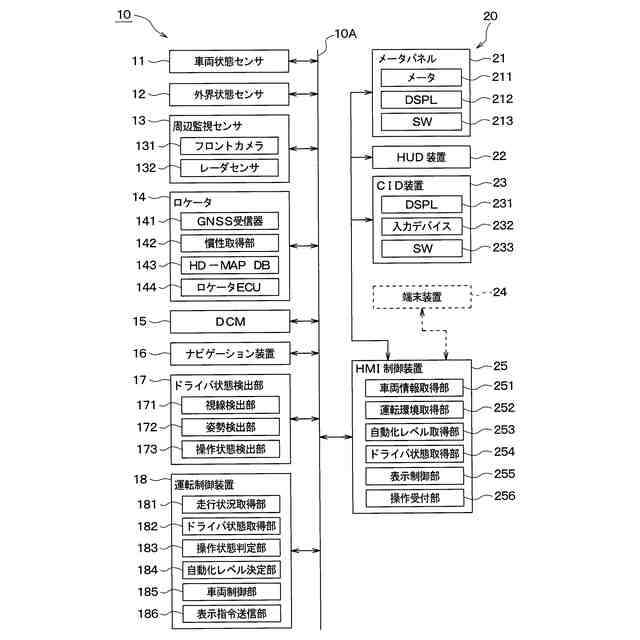
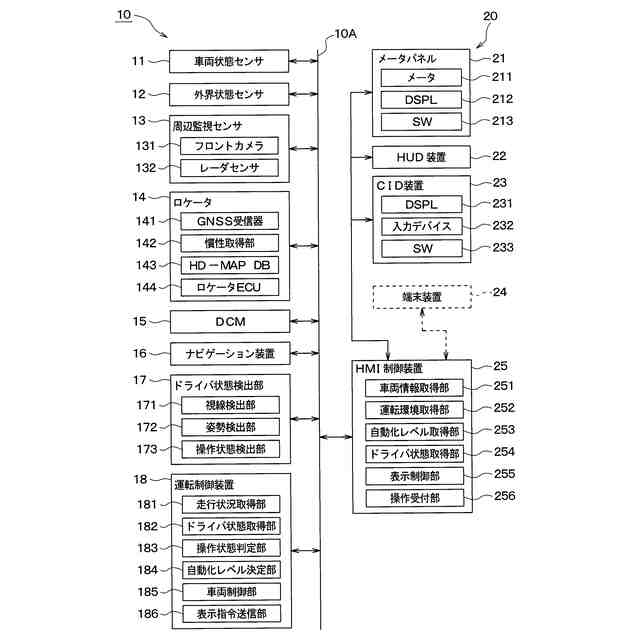
図1に示された車載システムの概略構成を示すブロック図である。
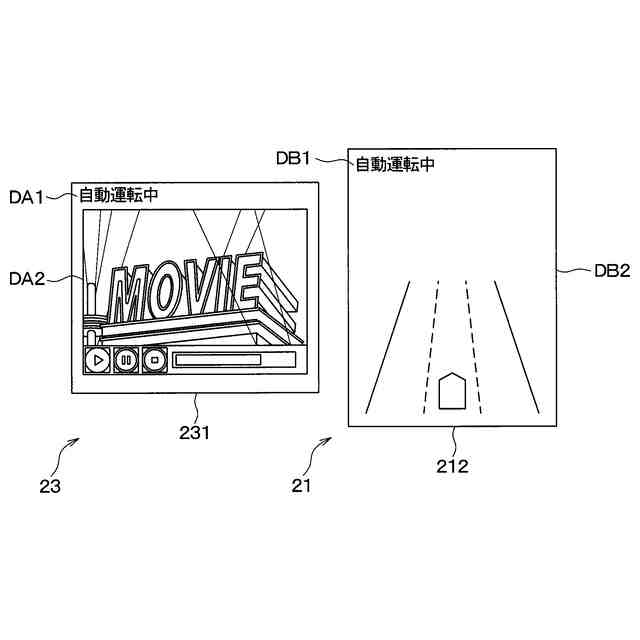
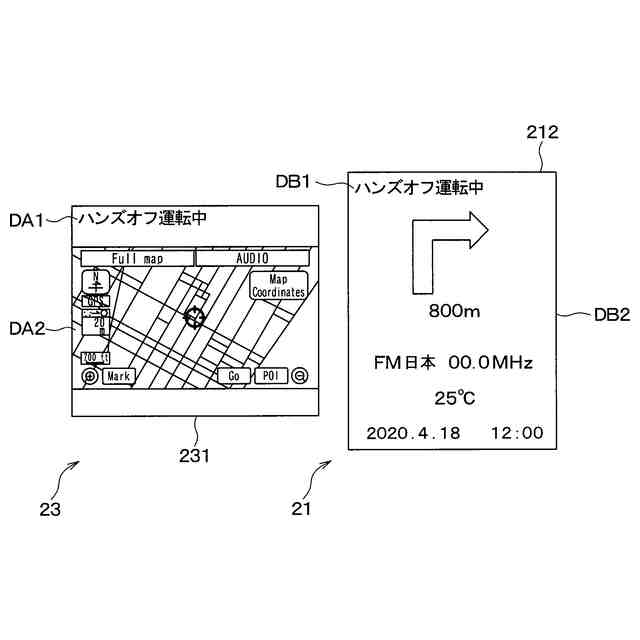
第一実施形態におけるHMI装置の表示例を示す概略図である。
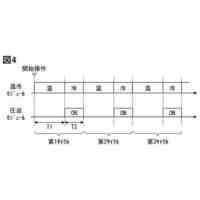
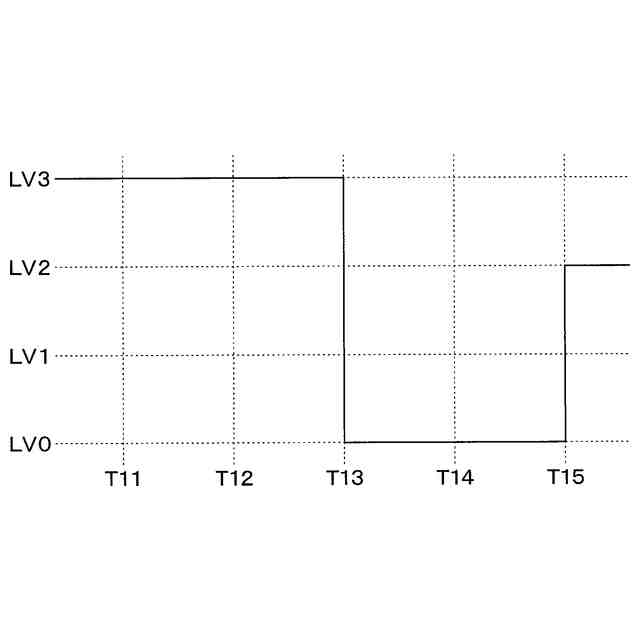
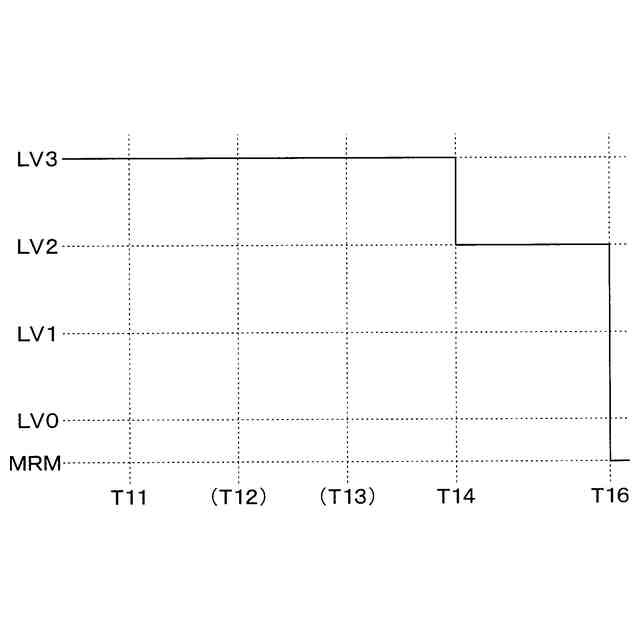
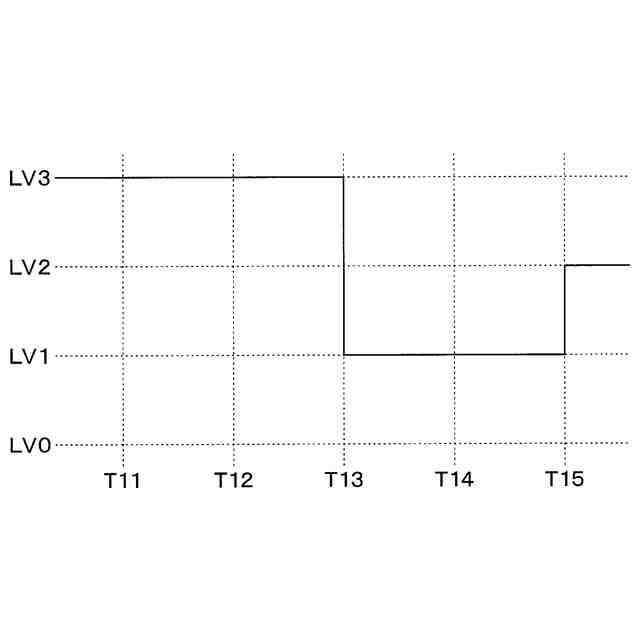
第一実施形態における運転自動化レベルの推移を示すタイムチャートである。
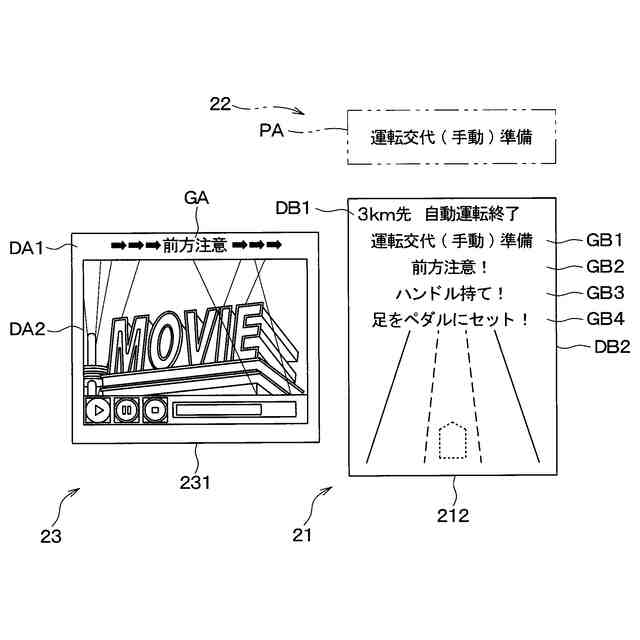
第一実施形態におけるHMI装置の表示例を示す概略図である。
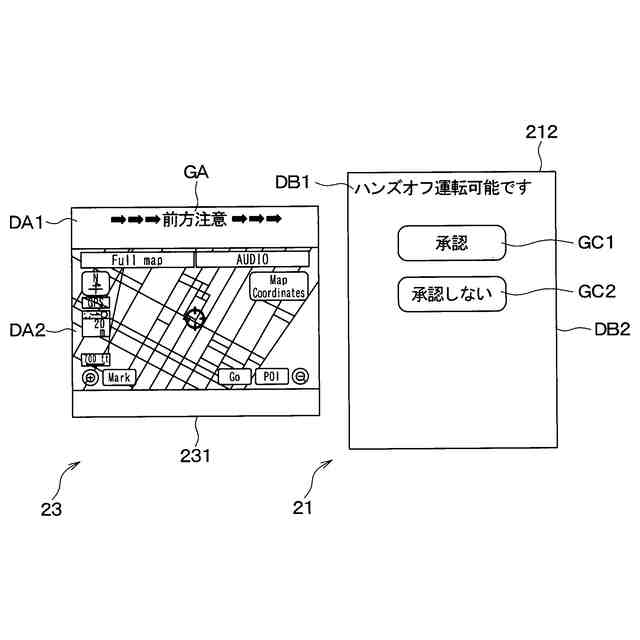
第一実施形態におけるHMI装置の表示例を示す概略図である。
第一実施形態におけるHMI装置の表示例を示す概略図である。
第一実施形態における運転自動化レベルの推移を示すタイムチャートである。
第二実施形態における運転自動化レベルの推移を示すタイムチャートである。
第二実施形態における運転自動化レベルの推移を示すタイムチャートである。
第三実施形態における運転自動化レベルの推移を示すタイムチャートである。
第三実施形態におけるHMI装置の表示例を示す概略図である。
第三実施形態における運転自動化レベルの推移を示すタイムチャートである。
第三実施形態におけるHMI装置の表示例を示す概略図である。
第四実施形態における運転自動化レベルの推移を示すタイムチャートである。
第四実施形態におけるHMI装置の表示例を示す概略図である。
第五実施形態における運転自動化レベルの推移を示すタイムチャートである。
第五実施形態における運転自動化レベルの推移を示すタイムチャートである。
第五実施形態における運転自動化レベルの推移を示すタイムチャートである。
第六実施形態における運転自動化レベルの推移を示すタイムチャートである。
第六実施形態における運転自動化レベルの推移を示すタイムチャートである。
第七実施形態における運転自動化レベルの推移を示すタイムチャートである。
第七実施形態における運転自動化レベルの推移を示すタイムチャートである。
第七実施形態における運転自動化レベルの推移を示すタイムチャートである。
第八実施形態における運転自動化レベルの推移を示すタイムチャートである。
第八実施形態および第九実施形態における運転自動化レベルの推移を示すタイムチャートである。
第九実施形態および第十実施形態における運転自動化レベルの推移を示すタイムチャートである。
第十実施形態における運転自動化レベルの推移を示すタイムチャートである。
【発明を実施するための形態】
【0009】
(実施形態)
以下、本発明の実施形態を、図面を参照しつつ説明する。なお、一つの実施形態に対して適用可能な各種の変形例の説明は、当該実施形態に関する一連の説明の途中に挿入されると、当該実施形態の理解が妨げられるおそれがある。このため、変形例については、当該実施形態に関する一連の説明の途中ではなく、その後にまとめて説明する。
【0010】
(第一実施形態:構成)
図1を参照すると、車両1は、いわゆる普通自動車であって、箱状の車体の内部空間である車室内に運転席2等の乗員座席を複数備えている。運転席2に搭乗する乗員を、以下「ドライバ」と称する。また、ドライバが運転席2にて標準運転姿勢を取った状態における、ドライバの視線方向を、以下「前方」と称する。「標準運転姿勢」とは、前進且つ直進中の車両1において左右両眼の眼球配列方向と左右両肩の配列方向とを略平行にしたドライバが、運転席2にて適切に手動運転可能に着座した場合の、当該ドライバの姿勢をいうものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
変調器
2日前
株式会社デンソー
回転子
9日前
株式会社デンソー
通信装置
1か月前
株式会社デンソー
トランス
24日前
株式会社デンソー
栽培装置
24日前
株式会社デンソー
光学部材
15日前
株式会社デンソー
回転電機
1か月前
株式会社デンソー
電子装置
23日前
株式会社デンソー
光学部材
10日前
株式会社デンソー
光学部材
1か月前
株式会社デンソー
電子装置
9日前
株式会社デンソー
圧電素子
1か月前
株式会社デンソー
清掃装置
22日前
株式会社デンソー
操作装置
1か月前
株式会社デンソー
電子部品
23日前
株式会社デンソー
駆動回路
3日前
株式会社デンソー
半導体装置
9日前
株式会社デンソー
電磁継電器
9日前
株式会社デンソー
輻射ヒータ
9日前
株式会社デンソー
熱輸送装置
29日前
株式会社デンソー
電力変換器
15日前
株式会社デンソー
半導体装置
4日前
株式会社デンソー
レーダ装置
9日前
株式会社デンソー
慣性センサ
9日前
株式会社デンソー
半導体装置
24日前
株式会社デンソー
レーダ装置
9日前
株式会社デンソー
半導体装置
16日前
株式会社デンソー
レーダ装置
1か月前
株式会社デンソー
半導体装置
16日前
株式会社デンソー
半導体装置
2日前
株式会社デンソー
点火コイル
23日前
株式会社デンソー
電力変換装置
23日前
株式会社デンソー
血流促進装置
2日前
株式会社デンソー
回路基板装置
23日前
株式会社デンソー
電力変換装置
9日前
株式会社デンソー
電力変換装置
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ