TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024168864
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2023085883
出願日
2023-05-25
発明の名称
位置推定装置及び位置推定方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G01S
5/02 20100101AFI20241128BHJP(測定;試験)
要約
【課題】移動体が測位手段を変更する際に推定位置の精度低下を抑制可能な位置推定装置を提供する。
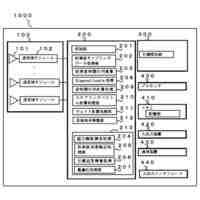
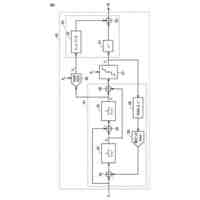
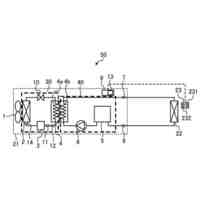
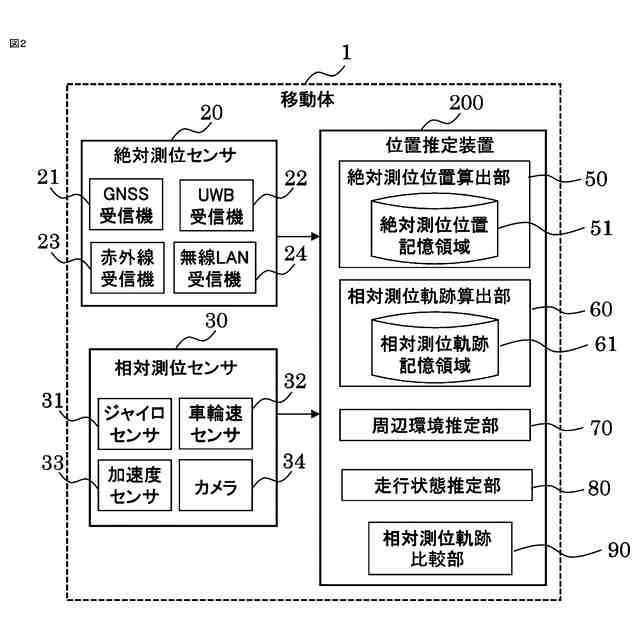
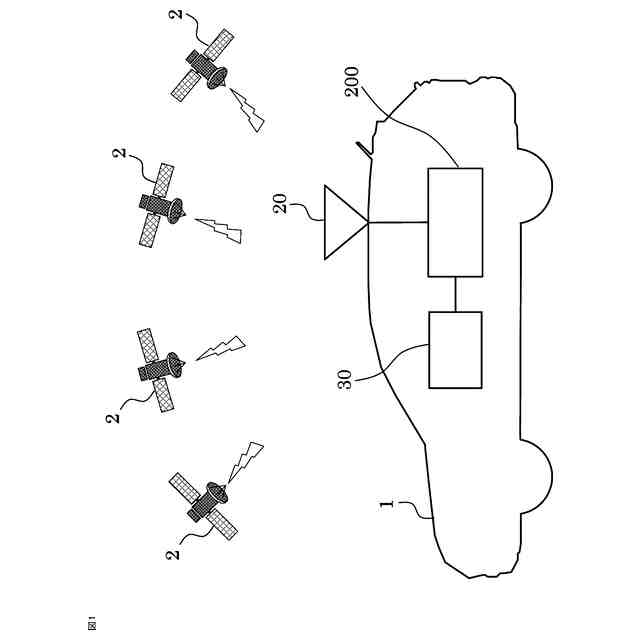
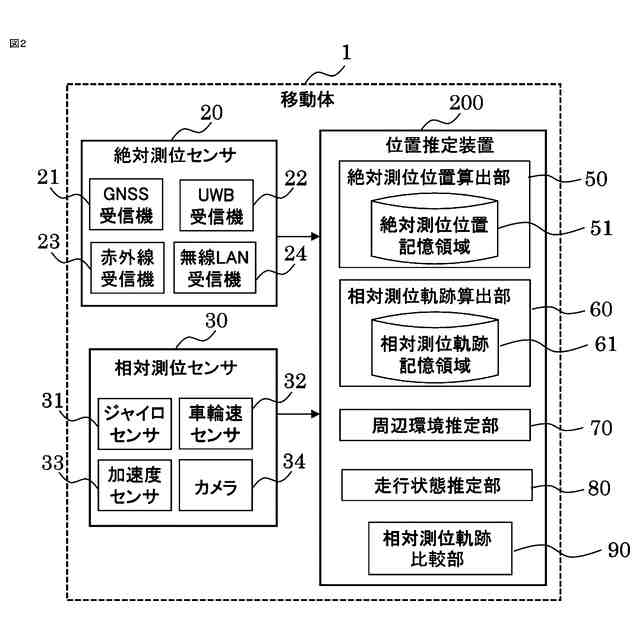
【解決手段】本願に開示される位置推定装置200は、絶対測位センサ20による絶対測位センサ情報、及び動体1の相対位置の変化を検出する相対測位センサ30による相対測位センサ情報に基づき自己位置を推定する位置推定装置200であって、絶対測位センサ情報に基づき移動体1の絶対測位位置を算出する絶対測位位置算出部50と、相対測位センサ情報に基づき絶対測位位置を基準とする移動体1の相対測位軌跡を算出する相対測位軌跡算出部60と、相対測位軌跡が相対測位軌跡選択条件を満足する場合に、選択された相対測位軌跡上にある移動体1の最新位置を移動体1の推定位置として出力する相対測位軌跡比較部90と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
移動体に搭載され、それぞれ既知の位置から放射される複数の信号を受信する絶対測位センサによって取得された絶対測位センサ情報、及び前記移動体に搭載され前記移動体の相対位置の変化を検出する相対測位センサによって取得された相対測位センサ情報に基づき自己位置を推定する位置推定装置であって、
前記絶対測位センサ情報に基づき、前記移動体の絶対測位位置を算出する絶対測位位置算出部と、
前記相対測位センサ情報に基づいて、前記絶対測位位置を基準とする前記移動体の相対測位軌跡を算出し、算出された前記相対測位軌跡を保持する相対測位軌跡記憶領域を有する相対測位軌跡算出部と、
前記相対測位軌跡が予め規定された相対測位軌跡選択条件を満足する場合に、選択された相対測位軌跡上にある前記移動体の最新位置を前記移動体の推定位置として出力する相対測位軌跡比較部と、
を備える位置推定装置。
続きを表示(約 1,800 文字)
【請求項2】
前記相対測位軌跡算出部は、前記相対測位センサ情報に基づく最新の相対測位軌跡が相対測位軌跡保持条件を満足するごとに、前記最新の相対測位軌跡を前記相対測位軌跡記憶領域に保持する処理を繰り返して、前記相対測位軌跡記憶領域に保持された過去の相対測位軌跡を前記最新の相対測位軌跡に更新し、
前記最新の相対測位軌跡が予め規定された前記相対測位軌跡保持条件を満足しない場合は、前記最新の相対測位軌跡を前記相対測位軌跡記憶領域に保持せずに削除することを特徴とする請求項1に記載の位置推定装置。
【請求項3】
前記絶対測位位置算出部は、算出された前記絶対測位位置を保持することが可能な絶対測位位置記憶領域を有し、前記絶対測位位置記憶領域に保持された複数の前記絶対測位位置に基づき前記移動体の絶対測位軌跡を算出し、前記絶対測位センサ情報に基づき前記絶対測位軌跡上の前記移動体の最新位置を前記絶対測位位置として更新することを特徴とする請求項2に記載の位置推定装置。
【請求項4】
前記絶対測位位置算出部は、前記絶対測位軌跡の信頼度を表す絶対測位軌跡信頼度を算出し、
前記相対測位軌跡算出部は、前記絶対測位軌跡信頼度が予め設定された閾値信頼度以上である場合に、相対測位軌跡算出条件を満足すると判定することを特徴とする請求項3に記載の位置推定装置。
【請求項5】
前記絶対測位軌跡信頼度は、前記絶対測位軌跡の算出に用いる前記複数の絶対測位位置にそれぞれ生じる推定誤差と、前記絶対測位軌跡の算出に用いる前記複数の絶対測位位置の前記相対測位軌跡に対するそれぞれの位置誤差と、前記絶対測位軌跡の算出に用いる前記複数の絶対測位位置を算出する間に前記移動体が移動した距離との少なくとも一つを指標として算出されることを特徴とする請求項4に記載の位置推定装置。
【請求項6】
前記絶対測位センサ情報及び前記相対測位センサ情報に基づき、前記移動体の周囲の走行環境を推定する周辺環境推定部をさらに備え、
前記絶対測位軌跡信頼度を算出するための指標として、前記移動体の周囲の走行環境をさらに含むことを特徴とする請求項5に記載の位置推定装置。
【請求項7】
前記相対測位軌跡算出部は、前記相対測位軌跡の信頼度である相対測位軌跡信頼度を算出し、
前記相対測位軌跡比較部は、前記相対測位軌跡信頼度が予め設定された閾値信頼度以上である場合に、前記相対測位軌跡選択条件を満足すると判定することを特徴とする請求項1から6のいずれか1項に記載の位置推定装置。
【請求項8】
前記相対測位軌跡信頼度は、前記絶対測位位置の推定誤差と、前記絶対測位位置に対する前記相対測位軌跡の位置誤差と、前記相対測位軌跡記憶領域に保持された前記相対測位軌跡に対する前記相対測位軌跡の位置誤差と、前記相対測位軌跡の算出開始時における前記絶対測位位置の推定誤差と、前記絶対測位センサ情報及び前記相対測位センサ情報から推定される前記移動体の走行状態と、前記相対測位軌跡の算出開始時における前記移動体の走行状態と、前記絶対測位センサ及び前記相対測位センサから推定される前記移動体の周囲の走行環境と、前記相対測位軌跡の算出開始時における前記移動体の走行環境と、前記相対測位軌跡の算出開始後から経過した経過時間との少なくとも一つを指標として算出されることを特徴とする請求項7に記載の位置推定装置。
【請求項9】
前記絶対測位センサ情報及び前記相対測位センサ情報に基づき、前記移動体の走行状態を推定する走行状態推定部をさらに備え、
前記相対測位軌跡信頼度を算出するための指標として、前記走行状態推定部が推定した前記移動体の走行状態と、前記相対測位軌跡の算出開始時における前記移動体の走行状態と、をさらに含むことを特徴とする請求項8に記載の位置推定装置。
【請求項10】
前記相対測位軌跡算出部は、前記相対測位軌跡記憶領域に保持された前記相対測位軌跡に関して、全ての前記相対測位軌跡信頼度が予め設定された閾値信頼度未満である場合に、相対測位軌跡算出条件を満足することを特徴とする請求項9に記載の位置推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、位置推定装置及び位置推定方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
GPS(Global Positioning System)、GNSS(Global Navigation Satellite System)、QZSS(Quasi-Zenith Satellite System)といった測位衛星を利用する位置推定技術、複数の無線LAN基地局あるいは携帯電話基地局からの電波の伝達時間または電波の電界強度を利用する位置推定技術、赤外線を利用する位置推定技術など、様々な位置推定技術が開発されている。
【0003】
しかしながら、例えば測位衛星を利用する位置推定の場合には、信号の電離層における遅延、ビル等によるマルチパス、信号の途絶等に起因する測位誤差が存在する。この測位誤差の影響を軽減するために、移動体の相対位置を推定するデッドレコニング等の技術が存在する。デッドレコニングは、主にジャイロセンサから得られる角速度及び車速センサから得られる車速を用いて位置推定を実施する技術である。一方、精度が低下した衛星測位位置を基準にデッドレコニングを開始すると、デッドレコニングによる測位位置の精度も同時に低下する問題がある。
【0004】
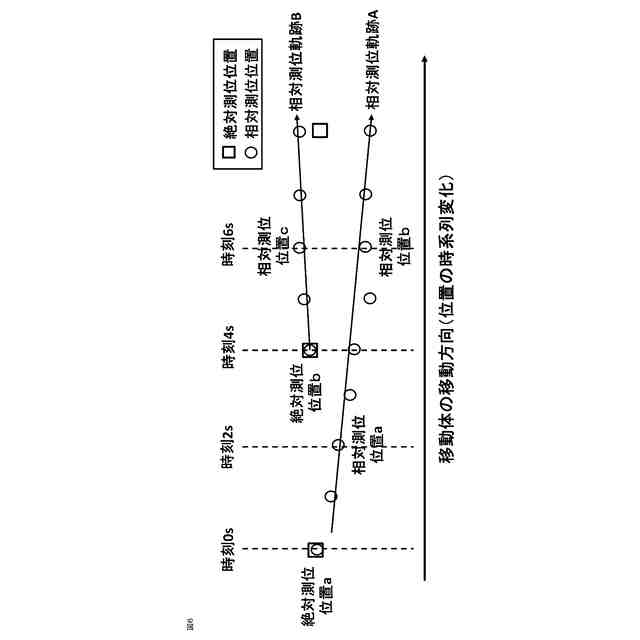
これらの問題に対して、特許文献1に記載の位置検出装置では、個々の衛星測位位置を起点として推測航法に基づく相対軌跡を推定し、保持することで、測位衛星から送信される測位信号が途絶する際に、衛星測位誤差の増大以前の相対軌跡を継承して推測航法に基づく推定位置を演算することによって、推測航法による推定位置の精度低下を抑制する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特許第6965720号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
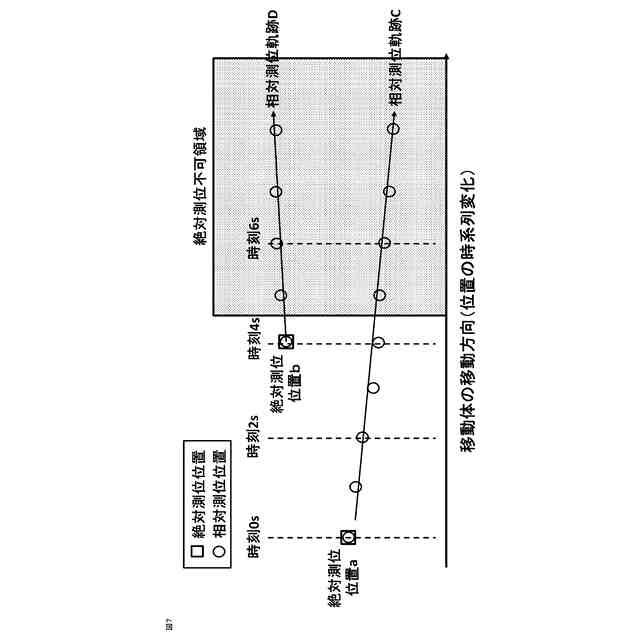
特許文献1に記載の位置検出装置によれば、衛星測位誤差の増大以前の相対軌跡を継承して推測航法に基づく推定位置を演算し、推測航法による位置の推定を継続する。しかしながら、相対軌跡の更新と棄却は逐次実施されており、衛星測位が不可な領域に進入した際に推測航法を継続するための相対軌跡の選択肢が限定され、推測航法の精度が低下してしまう可能性がある。
【0007】
本開示は、上述の課題を解決するためになされたもので、例えば衛星測位のような絶対測位が不可能な場合であっても推定位置の精度低下を抑制可能な位置推定装置及び位置推定方法を得ることを目的とする。
【課題を解決するための手段】
【0008】
本願に開示される位置推定装置は、
移動体に搭載され、それぞれ既知の位置から放射される複数の信号を受信する絶対測位センサによって取得された絶対測位センサ情報、及び前記移動体に搭載され前記移動体の相対位置の変化を検出する相対測位センサによって取得された相対測位センサ情報に基づき自己位置を推定する位置推定装置であって、
前記絶対測位センサ情報に基づき、前記移動体の絶対測位位置を算出する絶対測位位置算出部と、
前記相対測位センサ情報に基づいて、前記絶対測位位置を基準とする前記移動体の相対測位軌跡を算出し、算出された前記相対測位軌跡を保持する相対測位軌跡記憶領域を有する相対測位軌跡算出部と、
前記相対測位軌跡が予め規定された相対測位軌跡選択条件を満足する場合に、選択された相対測位軌跡上にある前記移動体の最新位置を前記移動体の推定位置として出力する相対測位軌跡比較部と、を備える。
【0009】
本願に開示される位置推定方法は、
移動体の位置を推定する位置推定装置によって以下の各ステップが実行される位置推定方法であって、
絶対測位センサによって取得された絶対測位センサ情報に基づき前記移動体の絶対測位位置を算出するステップと、
前記移動体の相対位置の変化を検出する相対測位センサによって取得された相対測位センサ情報に基づいて、前記絶対測位位置を基準とする前記移動体の相対測位軌跡を算出し、算出された前記相対測位軌跡を相対測位軌跡記憶領域に保持するステップと、
前記相対測位軌跡が予め規定された相対測位軌跡選択条件を満足する場合に、選択された相対測位軌跡上にある前記移動体の最新位置を前記移動体の位置として推定するステップと、
前記相対測位センサ情報に基づき最新の相対測位軌跡が相対測位軌跡保持条件を満足するごとに、前記最新の相対測位軌跡を前記相対測位軌跡記憶領域に保持する処理を繰り返して、前記相対測位軌跡記憶領域に保持された過去の相対測位軌跡を前記最新の相対測位軌跡に更新するステップと、を備える。
【発明の効果】
【0010】
本願に開示される位置推定装置及び位置推定方法によれば、絶対測位位置を基準とし、相対測位センサから取得する相対測位センサ情報に基づいて、相対測位軌跡及び相対測位軌跡信頼度を随時保持及び更新することにより、移動体の走行中に絶対測位が不可になった場合であっても、より信頼度の高い相対測位軌跡を用いて、高精度な位置推定を継続することが可能となる効果を奏する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
換気扇
22日前
三菱電機株式会社
照明器具
2日前
三菱電機株式会社
照明器具
1日前
三菱電機株式会社
照明器具
1日前
三菱電機株式会社
電機機器
16日前
三菱電機株式会社
照明器具
1日前
三菱電機株式会社
照明装置
1日前
三菱電機株式会社
照明器具
23日前
三菱電機株式会社
照明器具
14日前
三菱電機株式会社
加熱調理器
23日前
三菱電機株式会社
空気清浄機
28日前
三菱電機株式会社
空気清浄機
28日前
三菱電機株式会社
空気清浄機
28日前
三菱電機株式会社
半導体装置
22日前
三菱電機株式会社
レーダ装置
15日前
三菱電機株式会社
空気清浄機
28日前
三菱電機株式会社
加熱調理器
15日前
三菱電機株式会社
空気清浄機
28日前
三菱電機株式会社
食器洗浄機
2日前
三菱電機株式会社
半導体装置
8日前
三菱電機株式会社
ホームドア
2日前
三菱電機株式会社
回路遮断器
1日前
三菱電機株式会社
溝加工方法
21日前
三菱電機株式会社
電気掃除機
1か月前
三菱電機株式会社
疑似窓照明
1日前
三菱電機株式会社
ΔΣ変調器
1日前
三菱電機株式会社
真空バルブ
1日前
三菱電機株式会社
半導体装置
22日前
三菱電機株式会社
レーダ装置
14日前
三菱電機株式会社
手乾燥装置
22日前
三菱電機株式会社
温水熱源機
22日前
三菱電機株式会社
電力変換装置
16日前
三菱電機株式会社
床暖房パネル
1日前
三菱電機株式会社
換気システム
1か月前
三菱電機株式会社
空調システム
15日前
三菱電機株式会社
アンテナ装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ