TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024133844
公報種別
公開特許公報(A)
公開日
2024-10-03
出願番号
2023043832
出願日
2023-03-20
発明の名称
ハンドリングシステム、情報処理装置、方法、プログラム、情報処理システム、およびデータ構造
出願人
株式会社東芝
代理人
弁理士法人志賀国際特許事務所
主分類
B25J
13/00 20060101AFI20240926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ピッキング動作の効率性を向上させることができるハンドリングシステム、情報処理装置、方法、プログラム、情報処理システム、およびデータ構造を提供する。
【解決手段】実施形態のハンドリングシステムは、物体のハンドリングを行うハンドリングシステムである。ハンドリングシステムは、保持部と、記憶部と、処理部と、を持つ。保持部は、物体を保持する。記憶部は、動作設定情報と、動作履歴情報と、を記憶する。動作設定情報は、保持部が物体を保持する保持動作に付帯する第1情報と保持部を動作させるための動作設定を含む第2情報とを関連付ける。動作履歴情報は、保持部の動作記録を含む。処理部は、動作設定情報に基づいて、保持部の動作を制御し、動作の動作記録に基づいて、動作履歴情報を更新し、更新された動作履歴情報に基づいて、動作設定情報を更新するか否かを判定する。
【選択図】図2
特許請求の範囲
【請求項1】
物体のハンドリングを行うハンドリングシステムであって、
前記物体を保持する保持部と、
前記保持部が前記物体を保持する保持動作に付帯する第1情報と前記保持部を動作させるための動作設定を含む第2情報とを関連付ける動作設定情報と、前記保持部の動作記録を含む動作履歴情報と、を記憶する記憶部と、
処理部と、
を備え、
前記処理部は、
前記動作設定情報に基づいて、前記保持部の動作を制御し、
前記動作の動作記録に基づいて、前記動作履歴情報を更新し、
前記更新された動作履歴情報に基づいて、前記動作設定情報を更新するか否かを判定する、
ハンドリングシステム。
続きを表示(約 1,000 文字)
【請求項2】
前記処理部は、特定の第1情報について前記動作設定情報を更新すると判定した場合に、他の第1情報について前記動作設定情報を更新するか否かを判定する、
請求項1に記載のハンドリングシステム。
【請求項3】
前記処理部は、前記特定の第1情報および前記他の第1情報における前記物体の属性、前記物体の配置、前記保持部の属性、および前記保持部の配置のうち1以上に少なくとも基づいて、前記他の第1情報について前記動作設定情報を更新するか否かを判定する、
請求項2に記載のハンドリングシステム。
【請求項4】
前記処理部は、前記保持部の動作制御の結果を評価し、
前記動作履歴情報は、動作制御の評価情報を含む、
請求項1~3のいずれか一項に記載のハンドリングシステム。
【請求項5】
前記処理部は、前記保持部の動作制御において失敗の予兆があったか否かを判定し、
前記評価情報は、失敗の予兆があったか否かを示す情報を含む、
請求項4に記載のハンドリングシステム。
【請求項6】
前記処理部は、前記動作履歴情報における特定の評価の出現回数または出現頻度に基づいて、前記動作設定情報を更新するか否かを判定する、
請求項4に記載のハンドリングシステム。
【請求項7】
前記処理部は、ハンドリング動作を行う前記保持部を変更するように前記動作設定情報を更新するか否か、を判定する第1更新判定を行う、
請求項1~3のいずれか一項に記載のハンドリングシステム。
【請求項8】
前記処理部は、前記保持部の移動経路において前記保持部の速度および/または加速度が減少するように前記動作設定情報を更新するか否か、を判定する第2更新判定を行う、
請求項1~3のいずれか一項に記載のハンドリングシステム。
【請求項9】
前記動作履歴情報は、前記処理部がハンドリング動作のための処理をリトライしたか否かを示すリトライ情報を含み、
前記処理部は、前記リトライ情報に少なくとも基づいて、前記動作設定情報を更新するか否かを判定する、
請求項1~3のいずれか一項に記載のハンドリングシステム。
【請求項10】
前記処理部は、リトライの回数または頻度が閾値以上である場合に、前記動作設定情報を更新すると判定する、
請求項9に記載のハンドリングシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、ハンドリングシステム、情報処理装置、方法、プログラム、情報処理システム、およびデータ構造に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
物流現場などにおいて、指定された物品のオーダに従って、1以上の物品を収納場所からピックアップし、別の領域に搬送するピッキング動作が行われる。ピッキングを行うピッキング装置が知られている。
【先行技術文献】
【特許文献】
【0003】
特許第5623358号
特許第5787642号
特開平10-249767号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、ピッキング動作の効率性を向上させることができるハンドリングシステム、情報処理装置、方法、プログラム、情報処理システム、およびデータ構造を提供することである。
【課題を解決するための手段】
【0005】
実施形態のハンドリングシステムは、物体のハンドリングを行うハンドリングシステムである。ハンドリングシステムは、保持部と、記憶部と、処理部と、を持つ。保持部は、物体を保持する。記憶部は、動作設定情報と、動作履歴情報と、を記憶する。動作設定情報は、保持部が物体を保持する保持動作に付帯する第1情報と保持部を動作させるための動作設定を含む第2情報とを関連付ける。動作履歴情報は、保持部の動作記録を含む。処理部は、動作設定情報に基づいて、保持部の動作を制御する。処理部は、動作の動作記録に基づいて、動作履歴情報を更新する。処理部は、更新された動作履歴情報に基づいて、動作設定情報を更新するか否かを判定する。
【図面の簡単な説明】
【0006】
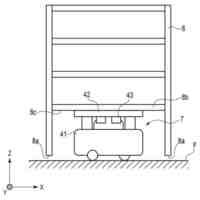
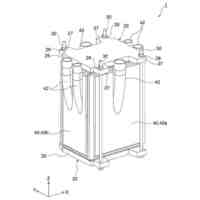
第1実施形態に係るピッキングシステム1の全体構成を示す概略図。
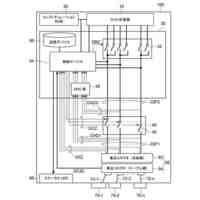
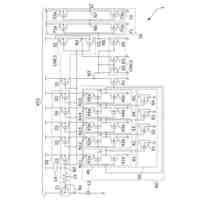
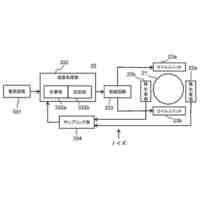
第1実施形態に係るピッキングシステム1の機能構成を示すブロック図。
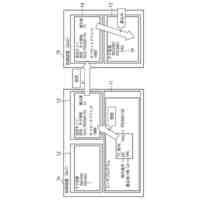
第1実施形態に係る動作履歴DB440のデータ構造を示す図。
第1実施形態に係るアイテムDB442のデータ構造を示す図。
第1実施形態に係るロボットDB444のデータ構造を示す図。
第1実施形態に係る動作設定DB446のデータ構造を示す図。
第1実施形態に係るピッキングシステム1によるピッキング動作の全体フローを示すフローチャート。
第1実施形態に係る動作設定更新部466が動作設定DB446を更新する処理を示すフローチャート。
第1実施形態に係る更新対象判定部464が更新対象を判定する処理を示すフローチャート。
第1実施形態に係る表示部580に表示される画面例を示す図。
第2実施形態に係る更新対象判定部464が更新対象を判定する処理を示すフローチャート。
【発明を実施するための形態】
【0007】
以下、実施形態のハンドリングシステム、情報処理装置、方法、プログラム、情報処理システム、およびデータ構造を、図面を参照して説明する。なお、図面は模式的または概念的なものであり、各部分の厚みと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。また、同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。また、図面に示すXYZ座標は、説明の便宜上定義されたものであり、発明を限定するものではない。
【0008】
本明細書において、「XXに基づく」とは「少なくともXXに基づく」ことを意味し、XXに加えて別の要素に基づく場合も含む。また、「XXに基づく」とは、XXを直接に用いる場合に限定されず、XXに対して演算や加工が行われたものに基づく場合も含む。「XX」は、任意の要素(例えば情報)である。
【0009】
(第1の実施形態)
図1~図10を参照して、第1の実施形態に係るピッキングシステム1(「ハンドリングシステム」の一例)について説明する。
まず、図1および図2を参照して、ピッキングシステム1の全体構成について概観する。
【0010】
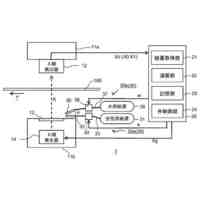
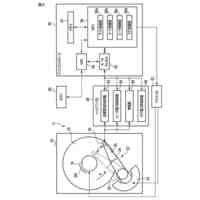
図1は、第1実施形態に係るピッキングシステム1の全体構成を示す概略図である。
図2は、第1実施形態に係るピッキングシステム1の機能構成を示すブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
2か月前
株式会社東芝
立て看板
1か月前
株式会社東芝
配線治具
23日前
株式会社東芝
遮断装置
1か月前
株式会社東芝
搬送装置
1か月前
株式会社東芝
電子機器
1か月前
株式会社東芝
判定装置
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
制御装置
1か月前
株式会社東芝
燃料電池
8日前
株式会社東芝
回転電機
3か月前
株式会社東芝
回転電機
3か月前
株式会社東芝
発振回路
3か月前
株式会社東芝
回転電機
3か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
真空バルブ
3か月前
株式会社東芝
主幹制御器
16日前
株式会社東芝
半導体装置
3か月前
株式会社東芝
電磁流量計
25日前
株式会社東芝
半導体装置
3か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
2か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
8日前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
X線厚み計
1日前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
スイッチギヤ
2か月前
株式会社東芝
車両システム
2か月前
株式会社東芝
ディスク装置
25日前
株式会社東芝
操作盤カバー
29日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ