TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024132548
公報種別
公開特許公報(A)
公開日
2024-10-01
出願番号
2023043360
出願日
2023-03-17
発明の名称
モータ制御装置及び車両
出願人
本田技研工業株式会社
代理人
弁理士法人クシブチ国際特許事務所
主分類
H02P
6/10 20060101AFI20240920BHJP(電力の発電,変換,配電)
要約
【課題】低回転時のモータ出力の安定化を達成できるモータ制御装置及び車両を提供する。
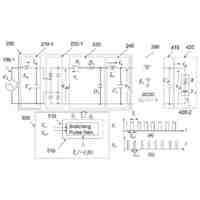
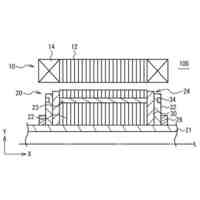
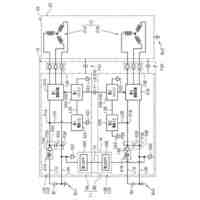
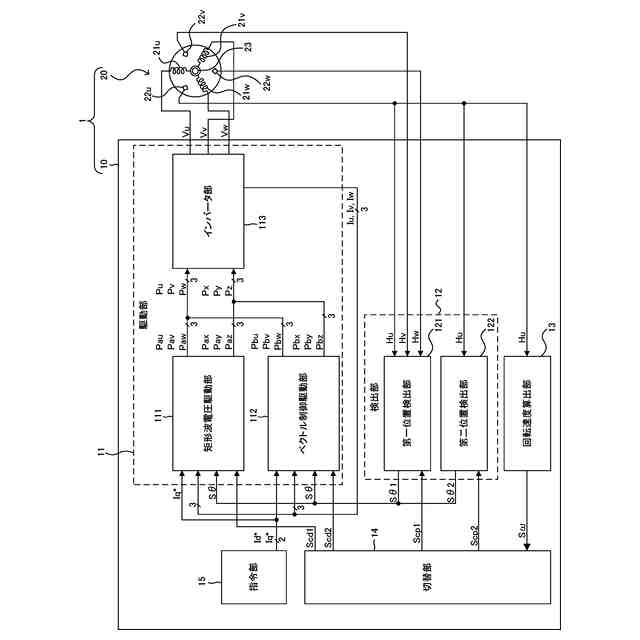
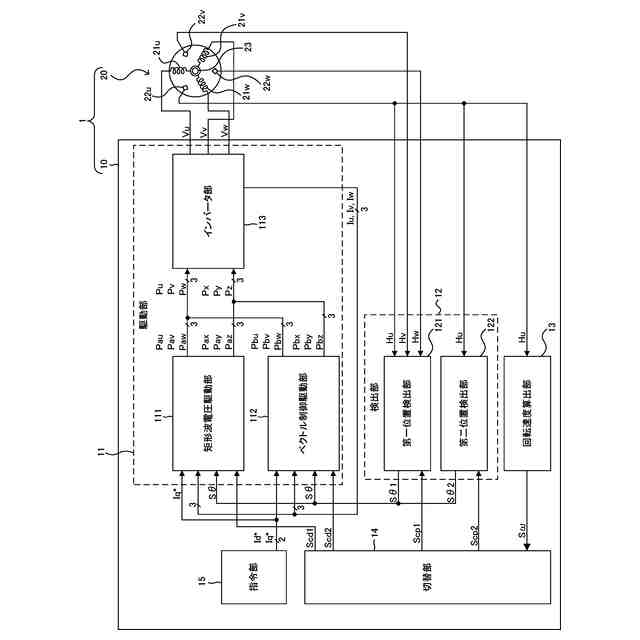
【解決手段】モータ制御装置10は、矩形波電圧駆動とベクトル制御駆動とによってモータ20を選択的に駆動可能な駆動部11と、第一位置検出と第二位置検出とによってロータ23の回転位置を選択的に検出可能な検出部12と、駆動部11に対してモータ20の駆動を、モータ20の回転速度が低回転速度閾値よりも低い場合に矩形波電圧駆動に切り替えさせ、回転速度が低回転速度閾値以上の場合にベクトル制御駆動に切り替えさせ、検出部12に対してモータ20に設けられたロータの回転位置の検出を、低回転速度より高い値に設定された高回転速度閾値よりも回転速度が低い場合に第一位置検出に切り替えさせ、回転速度が高回転速度閾値以上の場合に第二位置検出に切り替えさせる切替部14と、を備えている。
【選択図】図1
特許請求の範囲
【請求項1】
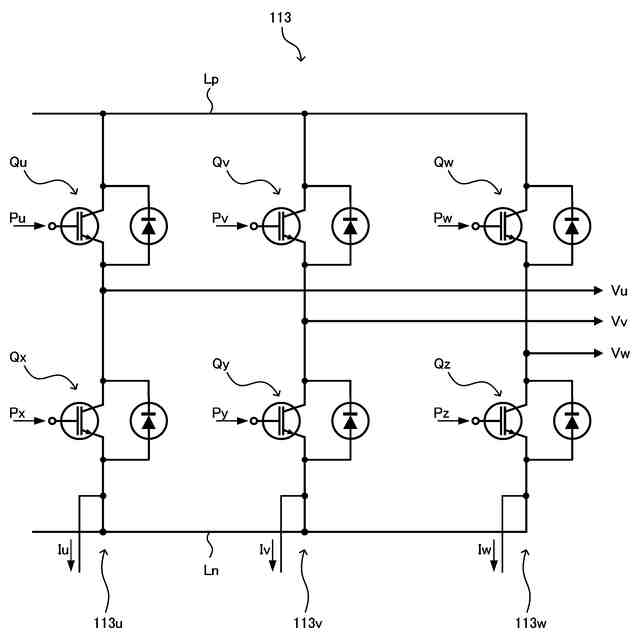
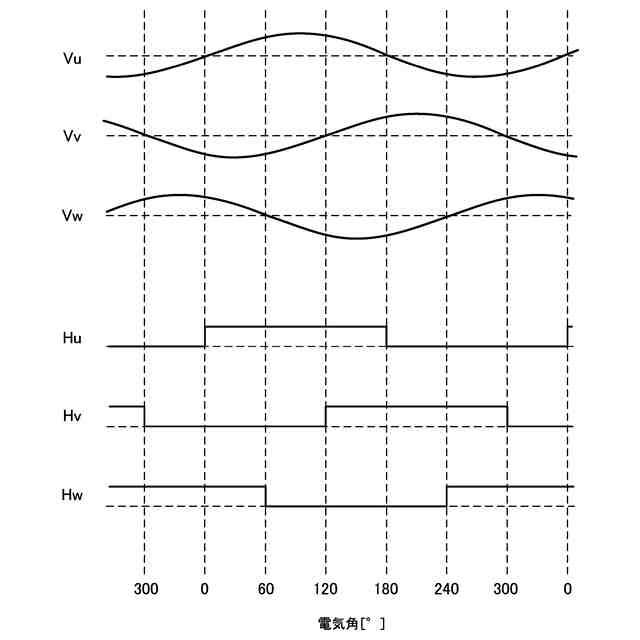
モータに設けられた固定子巻線に矩形波電圧を印加して前記モータを駆動する矩形波電圧駆動と、前記固定子巻線に正弦波電圧を印加して前記モータを駆動するベクトル制御駆動とによって前記モータを選択的に駆動可能な駆動部と、
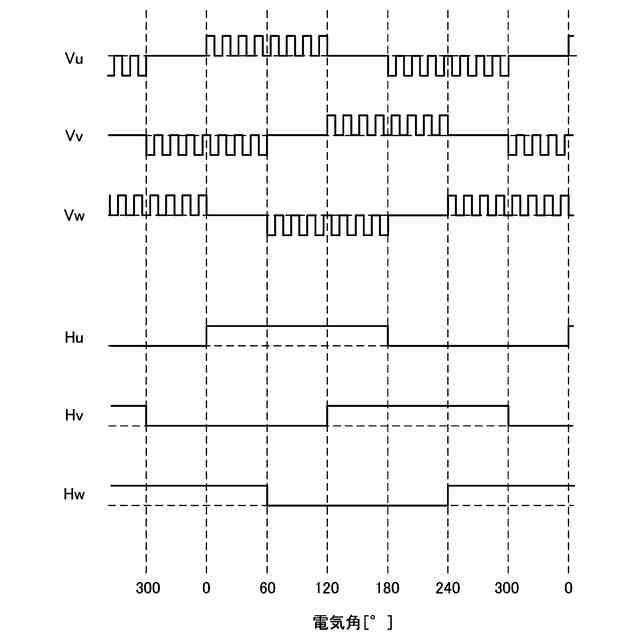
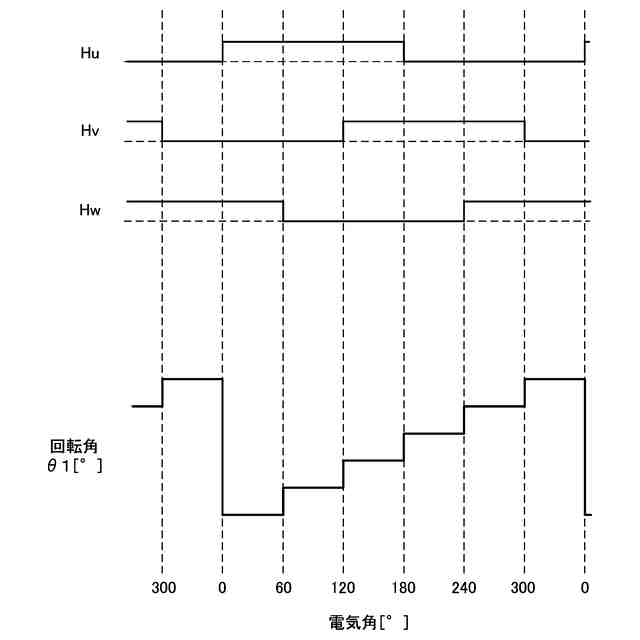
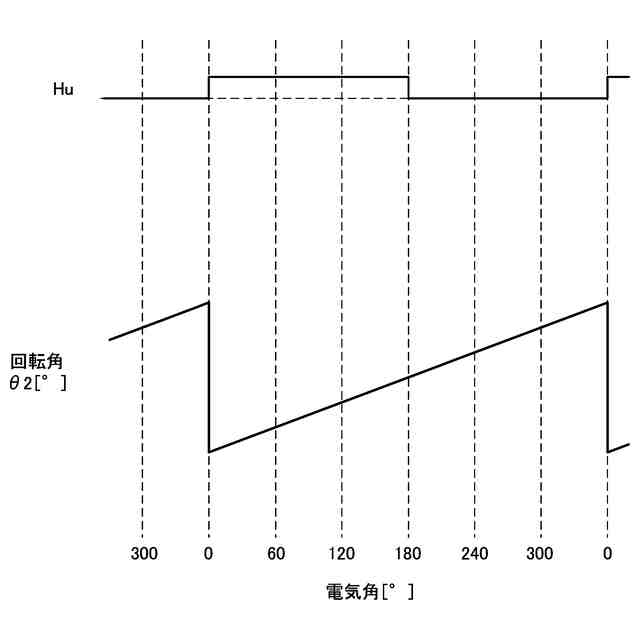
前記モータに設けられたロータの回転位置を示す複数の位置信号の信号レベルの組合せに基づく第一位置検出と、前記複数の位置信号のうちのいずれか1つの信号レベルの変化に基づく第二位置検出とによって前記回転位置を選択的に検出可能な検出部と、
前記モータの回転速度に基づいて、前記駆動部に対して前記モータの駆動を前記矩形波電圧駆動又は前記ベクトル制御駆動に切り替えさせ、かつ前記検出部に対して前記回転位置の検出を前記第一位置検出又は前記第二位置検出に切り替えさせる切替部と、
を備え、
前記切替部は、
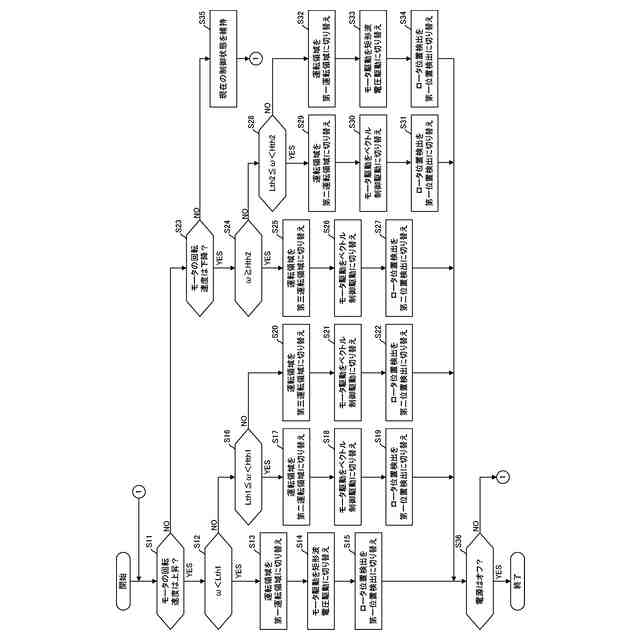
前記モータの回転速度が低回転速度閾値よりも低い場合に前記矩形波電圧駆動に切り替えさせ、前記回転速度が前記低回転速度閾値以上の場合に前記ベクトル制御駆動に切り替えさせ、
前記低回転速度より高い値に設定された高回転速度閾値よりも前記回転速度が低い場合に前記第一位置検出に切り替えさせ、前記回転速度が前記高回転速度閾値以上の場合に前記第二位置検出に切り替えさせる
モータ制御装置。
続きを表示(約 640 文字)
【請求項2】
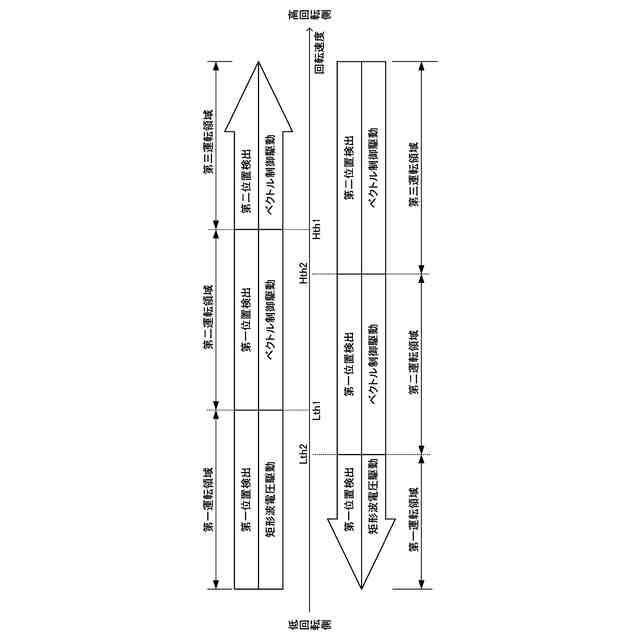
前記モータの運転領域は、前記低回転速度閾値及び前記高回転速度閾値に対応付けて、前記矩形波電圧駆動及び前記第一位置検出で運転される第一運転領域と、前記ベクトル制御駆動及び前記第一位置検出で運転される第二運転領域と、前記ベクトル制御駆動及び前記第二位置検出で運転される第三運転領域とに区分されており、
前記切替部は、前記運転領域を前記回転速度に応じて、前記第一運転領域、前記第二運転領域及び前記第三運転領域に切り替える
請求項1に記載のモータ制御装置。
【請求項3】
前記低回転速度閾値及び前記高回転速度閾値のそれぞれは、前記回転速度が上昇する場合と前記回転速度が下降する場合とで異なる値に設定されている
請求項1に記載のモータ制御装置。
【請求項4】
前記低回転速度閾値及び前記高回転速度閾値のそれぞれは、前記回転速度が上昇する場合よりも前記回転速度が下降する場合の方が低い値に設定されている
請求項3に記載のモータ制御装置。
【請求項5】
前記複数の位置信号のうちのいずれか1つに基づいて前記回転速度を算出する算出部を備える
請求項1に記載のモータ制御装置。
【請求項6】
請求項1から5までのいずれか一項に記載のモータ制御装置と、
前記モータと、
前記モータに設けられ前記複数の位置信号を出力する複数の位置検出部と、
を備える車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置及び車両に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、低炭素社会又は脱炭素社会の実現に向けた取り組みが活発化し、車両においてもCO
2
排出量の削減やエネルギー効率の改善のために、電動化技術に関する研究開発が行われている。この電動化技術の1つとして、所定の電圧波形を有する駆動電圧を印加して車両に設けられたモータを駆動する技術が知られている。
【0003】
特許文献1は、DCモータの回転速度がしきい値未満の場合に矩形波通電駆動を行い、DCモータの回転速度がしきい値以上の場合に正弦波通電駆動を行う技術が開示する。特許文献1に開示された技術により、モータ起動時における相切り換え時のブレーキ動作を回避し、起動トルクの低減を抑制することができる。
【0004】
特許文献2は、ブラシレスモータに設けられた各ホールセンサで検出されるパルス状位置センサ信号の立ち上りあるいは立ち下りエッジ間の間隔である半周期または1周期の時間間隔に基づいて、ブラシレスモータに設けられた永久磁石回転子の回転数を計算する技術を開示する。特許文献2に開示された技術により、各ホールセンサの取付け位置のばらつきにより発生する回転数の計算誤差を小さくすることができ、滑らかな回転で騒音の低いブラシレスモータが実現できる。
【先行技術文献】
【特許文献】
【0005】
特開2004-242432号公報
特開2003-264990号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、電動化技術に関する技術の1つとしてモータの駆動技術では、モータの低回転時はモータに設けられたロータの磁極位置検出の分解能が低下するため、低回転時のモータ出力が安定しない、という課題がある。
【0007】
本願は上記課題解決のため、低回転時のモータ出力の安定化の達成を目的としたものである。そして、延いてはエネルギー効率の改善に寄与するものである。
【課題を解決するための手段】
【0008】
上記目的を達成するための一態様は、モータに設けられた固定子巻線に矩形波電圧を印加して前記モータを駆動する矩形波電圧駆動と、前記固定子巻線に正弦波電圧を印加して前記モータを駆動するベクトル制御駆動とによって前記モータを選択的に駆動可能な駆動部と、前記モータに設けられたロータの回転位置を示す複数の位置信号の信号レベルの組合せに基づく第一位置検出と、前記複数の位置信号のうちのいずれか1つの信号レベルの変化に基づく第二位置検出とによって前記回転位置を選択的に検出可能な検出部と、前記モータの回転速度に基づいて、前記駆動部に対して前記モータの駆動を前記矩形波電圧駆動又は前記ベクトル制御駆動に切り替えさせ、かつ前記検出部に対して前記回転位置の検出を前記第一位置検出又は前記第二位置検出に切り替えさせる切替部と、を備え、前記切替部は、前記モータの回転速度が低回転速度閾値よりも低い場合に前記矩形波電圧駆動に切り替えさせ、前記回転速度が前記低回転速度閾値以上の場合に前記ベクトル制御駆動に切り替えさせ、前記低回転速度より高い値に設定された高回転速度閾値よりも前記回転速度が低い場合に前記第一位置検出に切り替えさせ、前記回転速度が前記高回転速度閾値以上の場合に前記第二位置検出に切り替えさせるモータ制御装置である。
【0009】
また、上記目的を達成するための他の態様は、上記一態様のモータ制御装置と、前記モータと、前記モータに設けられ前記複数の位置信号を出力する複数の位置検出部と、を備える車両である。
【発明の効果】
【0010】
上記態様によれば、低回転時のモータ出力の安定化を達成できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
共振形AC-DC電源
1日前
個人
ファラデー発電改良型
18日前
個人
磁気浮上モーター
6日前
キヤノン電子株式会社
モータ
11日前
中国電力株式会社
梯子
1日前
ニデック株式会社
モータ
22日前
株式会社ミクロブ
駆動装置
4日前
キヤノン株式会社
制御装置
11日前
オムロン株式会社
保護装置
1日前
トヨタ自動車株式会社
ロータ
12日前
ダイハツ工業株式会社
冷却装置
19日前
本田技研工業株式会社
回転電機
19日前
本田技研工業株式会社
回転電機
19日前
サンデン株式会社
電力変換装置
4日前
株式会社ダイヘン
溶接機
28日前
オムロン株式会社
フィルタ装置
4日前
ニデック株式会社
ステータ
19日前
ニデック株式会社
ステータ
19日前
個人
多目的 プロペラコアモーター
5日前
株式会社アイシン
回転電機駆動装置
1日前
株式会社豊田自動織機
ロータ
今日
個人
引掛け金具付きソーラーパネル用架台
12日前
株式会社ダイヘン
電力システム
1日前
ミネベアミツミ株式会社
モータ
7日前
アイシン高丘株式会社
ロータシャフト
7日前
富士電機株式会社
電力変換装置
4日前
富士電機株式会社
電力変換装置
1日前
株式会社ジェイテクト
制御装置
28日前
日産自動車株式会社
インバータ
22日前
株式会社ダイヘン
電力供給装置
29日前
株式会社ダイヘン
電力システム
19日前
住友電装株式会社
電線固定部材
28日前
株式会社アイシン
巻線界磁型回転電機
28日前
株式会社東芝
電力変換装置
19日前
株式会社デンソー
電気部品
11日前
株式会社日立製作所
回転電機
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ