TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024108240
公報種別
公開特許公報(A)
公開日
2024-08-13
出願番号
2023012505
出願日
2023-01-31
発明の名称
触覚検出装置、触覚検出システム、プログラム、及び触覚検出方法
出願人
豊田合成株式会社
,
国立研究開発法人理化学研究所
,
タッチエンス株式会社
代理人
個人
,
個人
主分類
G01L
5/165 20200101AFI20240805BHJP(測定;試験)
要約
【課題】接触対象物の触覚情報を推定する精度を向上させる。
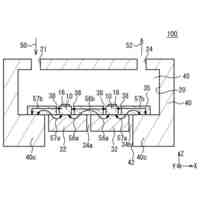
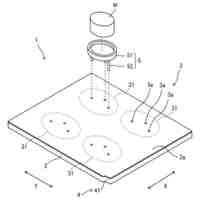
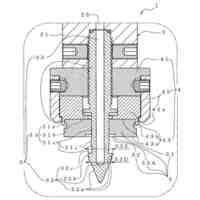
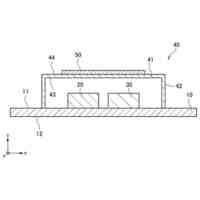
【解決手段】触覚検出装置11は、第1検出面21Aを有し、第1検出面21Aに加えられた荷重を検出する感圧センサ21と、感圧センサ21の第1検出面21Aに配置された中間部材22と、中間部材22の表面に配置され、第1検出面21Aよりも小さい面積の第2検出面23Aを有し、第2検出面23Aに加えられた外力を検出する多軸力覚センサ23と、を備える。感圧センサ21は、多軸力覚センサ23及び中間部材22を通じて第1検出面21Aに加えられた圧力を検出する。
【選択図】図4
特許請求の範囲
【請求項1】
第1検出面を有し、前記第1検出面に加えられた荷重を検出する感圧センサと、
前記感圧センサの前記第1検出面に配置された中間部材と、
前記中間部材の表面に配置され、前記第1検出面よりも小さい面積の第2検出面を有し、前記第2検出面に加えられた外力を検出する多軸力覚センサと、を備え、
前記感圧センサは、前記多軸力覚センサ及び前記中間部材を通じて前記第1検出面に加えられた圧力を検出する触覚検出装置。
続きを表示(約 960 文字)
【請求項2】
前記多軸力覚センサは、3次元直交座標の各座標軸方向の圧力、及び前記3次元直交座標の各座標軸周りのモーメントを検出する請求項1に記載の触覚検出装置。
【請求項3】
前記感圧センサの前記第1検出面に対する前記第2検出面の角度が異なる複数の前記多軸力覚センサを備える請求項1に記載の触覚検出装置。
【請求項4】
前記感圧センサは、エラストマー製の静電容量式感圧センサである請求項1に記載の触覚検出装置。
【請求項5】
前記多軸力覚センサを間に挟んで前記中間部材の表面を覆う被覆体を備え、
前記被覆体は、前記中間部材よりも柔らかい弾性材料により形成されている請求項1に記載の触覚検出装置。
【請求項6】
請求項1~5のいずれか一項に記載の触覚検出装置と、
前記感圧センサ及び前記多軸力覚センサの各検出結果に基づいて、前記触覚検出装置に接触した接触対象物の触覚情報を推定する情報処理装置とを備える触覚検出システム。
【請求項7】
請求項1~5のいずれか一項に記載の触覚検出装置の検出結果に基づいて、前記触覚検出装置に接触した接触対象物の触覚情報を推定する処理を実行する情報処理装置としてコンピュータを機能させるためのプログラムであって、
前記感圧センサの検出結果及び前記多軸力覚センサの検出結果に基づいて前記触覚情報を推定する処理を前記コンピュータに実行させるプログラム。
【請求項8】
第1検出面に加えられた荷重を検出する感圧センサの前記第1検出面に中間部材を配置し、
前記第1検出面よりも小さい面積の第2検出面を有し、前記第2検出面に加えられた外力を検出する多軸力覚センサを前記中間部材の表面に配置し、
前記中間部材の表面に直接又は間接的に接触対象物を接触させた際に、前記多軸力覚センサの前記第2検出面に加えられた圧力を検出するとともに、前記多軸力覚センサ及び前記中間部材を通じて前記感圧センサの前記第1検出面に加えられた圧力を検出し、
前記感圧センサの検出結果及び前記多軸力覚センサの検出結果に基づいて前記接触対象物の触覚情報を推定する触覚検出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、触覚検出装置、触覚検出システム、プログラム、及び触覚検出方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
人の物体認知において、直接触れることによって得られる情報である感触(例えば、重さ、硬軟、表面粗さ)は大きな役割を果たしている。近年、ロボットや義手などの機械に触覚機能を付与する技術の開発が行われている。例えば、特許文献1には、弾性体により形成される球殻構造体と、球殻構造体の内部に配置された2個の歪みゲージとを備える触覚検出装置が開示されている。この触覚検出装置は、球殻構造体の表面が接触対象物と接触することによって該表面に生じる歪み分布を歪みゲージによって検出し、その検出結果に基づいて接触対象物の材質を認知する。
【先行技術文献】
【特許文献】
【0003】
特開2007-017243号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
触覚検出装置には、触覚に基づく人の認識体系に近い物体認知ができるようにするために、接触対象物に関して、人が触覚から取得する情報である触覚情報(例えば、接触対象物の硬軟)を機械的に推定する精度を向上させることが求められている。
【課題を解決するための手段】
【0005】
上記課題を解決する態様を記載する。
[態様1]
第1検出面を有し、前記第1検出面に加えられた荷重を検出する感圧センサと、前記感圧センサの前記第1検出面に配置された中間部材と、前記中間部材の表面に配置され、前記第1検出面よりも小さい面積の第2検出面を有し、前記第2検出面に加えられた外力を検出する多軸力覚センサと、を備え、前記感圧センサは、前記多軸力覚センサ及び前記中間部材を通じて前記第1検出面に加えられた圧力を検出する触覚検出装置。
【0006】
上記構成によれば、触覚検出装置に接触対象物を接触させる触動作時において、中間部材の表面に加えられる局所的な外力、及び中間部材全体に加えられた総荷重の2種類の情報を取得できる。これらの2種類の情報を組み合わせて触覚情報を推定することにより、多軸力覚センサの検出結果のみに基づいて触覚情報を推定する場合と比較して、推定の精度が向上する。
【0007】
[態様2]
前記多軸力覚センサは、3次元直交座標の各座標軸方向の圧力、及び前記3次元直交座標の各座標軸周りのモーメントを検出する態様1に記載の触覚検出装置。
【0008】
上記構成によれば、触覚情報の推定の精度が更に向上する。
[態様3]
前記感圧センサの前記第1検出面に対する前記第2検出面の角度が異なる複数の前記多軸力覚センサを備える態様1又は態様2に記載の触覚検出装置。
【0009】
上記構成によれば、接触対象物が接触している部分の推定、及び接触対象物が接触している角度の推定の精度が向上する。これらの結果、触覚情報の推定の精度が更に向上する。
【0010】
[態様4]
前記感圧センサは、エラストマー製の静電容量式感圧センサである態様1~3のいずれか一つに記載の触覚検出装置。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
電気抵抗の測定方法
3日前
株式会社トプコン
測量装置
18日前
株式会社トプコン
測量装置
18日前
エイブリック株式会社
半導体装置
20日前
太陽誘電株式会社
検出装置
23日前
太陽誘電株式会社
検出装置
6日前
スガ試験機株式会社
ガス腐食試験機
23日前
日本碍子株式会社
ガスセンサ
16日前
北陽電機株式会社
光電センサ
2日前
CKD株式会社
錠剤検査装置
10日前
株式会社キーエンス
超音波流量センサ
6日前
株式会社日立国際電気
試験装置
20日前
株式会社東芝
センサ
6日前
TDK株式会社
ガスセンサ
25日前
栗田工業株式会社
pH電極
25日前
株式会社ジークエスト
感温センサー
6日前
株式会社イシダ
電子秤
23日前
ニデック株式会社
測定用治具
3日前
ミツミ電機株式会社
測距装置
25日前
ニデック株式会社
測定用治具
3日前
株式会社チノー
放射光導光型温度計
6日前
大陽日酸株式会社
液面センサ
16日前
愛知製鋼株式会社
位置推定システム
9日前
中国電力株式会社
経路案内システム
24日前
株式会社ヒロハマ
包装用容器の気密検査治具
12日前
東レ株式会社
センサー素子及びガスセンサー
9日前
株式会社トクヤマ
全固体型イオン選択性電極
16日前
中央精機株式会社
変角平行光投光装置
16日前
TDK株式会社
磁気検出システム
12日前
TDK株式会社
センサモジュール
12日前
トヨタ自動車株式会社
電力供給システム
23日前
ミネベアミツミ株式会社
測距装置
25日前
株式会社SUBARU
ナビゲーション装置
20日前
ホシデン株式会社
センサ装置
6日前
エスペック株式会社
耐電圧試験装置
23日前
コムスキャンテクノ株式会社
X線CT装置
18日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ