TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024105189
公報種別
公開特許公報(A)
公開日
2024-08-06
出願番号
2024000560
出願日
2024-01-05
発明の名称
ブドウの品質を予測するために画像を自律的に取得し処理するモバイルカメラシステム
出願人
株式会社クボタ
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01N
21/27 20060101AFI20240730BHJP(測定;試験)
要約
【課題】ブドウの品質を予測するために画像を自律的に取得して処理する方法に関する。
【解決手段】その方法は、第1の画像データを取得することと、前記第1の画像データに基づいて対象物を検出することと、前記第1の画像データに基づいて前記対象物の位置を決定することと、前記対象物の位置に基づいて第2の画像データを取得することと、前記対象物の特性を決定するために、前記第2の画像データを分析することと、を含む。前記第2の画像データはハイパースペクトル画像データを含む。
【選択図】なし
特許請求の範囲
【請求項1】
第1の画像データを取得することと、
前記第1の画像データに基づいて対象物を検出することと、
前記第1の画像データに基づいて前記対象物の位置を決定することと、
前記対象物の位置に基づいて第2の画像データを取得することと、
前記対象物の特性を決定するために、前記第2の画像データを分析することと、
を含む方法であって、
前記第2の画像データはハイパースペクトル画像データを含む、
方法。
続きを表示(約 670 文字)
【請求項2】
前記対象物は農産物である、請求項1に記載の方法。
【請求項3】
前記第1の画像データは、色データおよび深度データを含む、請求項1に記載の方法。
【請求項4】
前記第1の画像データは、色データおよび深度データを含み、
前記色データのみに基づいて前記対象物を検出し、
前記対象物の位置は、前記色データと前記深度データとの組み合わせに基づいて決定される、
請求項1に記載の方法。
【請求項5】
前記第1の画像データを取得する間に、前記対象物を照明する光源をオンにすることをさらに含む、請求項1に記載の方法。
【請求項6】
前記光源はLED光源である、請求項5に記載の方法。
【請求項7】
前記光源は、前記第2の画像データを取得する前にオフにされる、請求項5に記載の方法。
【請求項8】
前記対象物の位置を決定した後、前記第2の画像データを取得する前に、ハイパースペクトルカメラを移動させることをさらに含み、
前記第2の画像データは前記ハイパースペクトルカメラによって取得される、請求項1に記載の方法。
【請求項9】
前記ハイパースペクトルカメラは、前記対象物の決定された位置に基づいて動かされる、請求項8に記載の方法。
【請求項10】
前記ハイパースペクトルカメラは直交アームによって動かされる、請求項8に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、カメラシステムおよび画像処理に関する。より具体的には、本発明は、ブドウの品質を予測するために画像を取得し処理することが可能なモバイルカメラシステムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
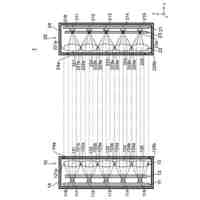
直交座標ロボットを含む直交座標システムは、フライス加工、印刷などの産業用途に使用されてきた。直交座標システムは、直線状で互いに直交して配置された3つの制御主軸を含み、各主軸は別々の駆動機構を有することができる。直交座標システムの剛性構造および直線運動により、高負荷下でも荷重を正確かつ確実に移動させることができる。しかし、直交座標システムは、一般に、カメラや光源のような装置の移動や位置決めには適用されていない。
【0003】
野菜、果物、その他の生産物のような食品の特性を決定するための公知のシステムは、カメラを使用して食品の画像を撮影し、その画像を分析して食品の所望の特性を決定することを含む。米国特許第10,408,748号、米国特許第8,014,569号、米国特許出願公開第2021/0311011号、米国特許第10,885,675号、および米国特許第9,922,261号には、そのような公知のシステムが開示されている。しかし、食品のハイパースペクトル画像の分析は行われていない。
【0004】
スペイン特許第2795499号は、果実のなる植物の少なくとも一部分のハイパースペクトル画像を撮像することを含む、一群の果実特性を決定する方法を開示している。しかし、スペイン特許第2795499号は、自然光を使用してハイパースペクトル画像を撮像するだけであるため、自然光のスペクトルが変動し得ることや、撮像中の果実のなる植物には関係しない光スペクトルをハイパースペクトル画像が含むことのために、画像を処理および分析する際にエラーが発生する可能性がある。さらに、スペイン特許第2795499号は、果実のなる植物の他の画像を得ることを開示しておらず、ユーザがハイパースペクトル画像から決定されたデータを検証し、人工知能(AI)モデルに基づいて追加的な処理を実行することを可能にするために、果実のなる植物の所望の部分を分離することが困難な場合がある。
【0005】
Fernandez-Novalesら("Non-Invasive Monitoring of Berry Ripening Using On-the-Go Hyperspectral Imaging in the Vineyard", Agronomy 2021, no. 12:2534)は、車両に設けられたハイパースペクトルカメラによるハイパースペクトル画像の撮像を含む、ブドウの成分を測定するためのハイパースペクトル撮像のプロセスを開示している。しかし、Fernandez-Novalesらは、環境光による日中のハイパースペクトル画像の撮像を示しているだけであり、日光のスペクトルが変動し得ることや、撮像中の果実のなる植物には関係しない光スペクトルをハイパースペクトル画像が含むことのために、画像を処理および分析する際にエラーが発生する可能性がある。さらに、Fernandez-Novalesらは、果実のなる植物のその他の画像が得られることを開示しておらず、ユーザがハイパースペクトル画像から決定されたデータを検証し、AIモデルに基づいて追加的な処理を実行するために、果実のなる植物の所望の部分を分離することが困難な場合がある。
【発明の概要】
【0006】
本発明の好適な実施形態は、ブドウの品質を予測するために画像を自律的に取得して処理することができるモバイルカメラシステムを提供する。
【0007】
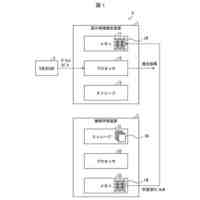
本発明の好適な実施形態による方法は、第1の画像データを取得することと、前記第1の画像データに基づいて対象物を検出することと、前記第1の画像データに基づいて前記対象物の位置を決定することと、前記対象物の位置に基づいて第2の画像データを取得することと、前記対象物の特性を決定するために、前記第2の画像データを分析することと、を含む。前記第2の画像データはハイパースペクトル画像データを含む。
【0008】
前記対象物は農産物であってもよい。前記第1の画像データは、色データおよび深度データを含んでもよい。前記第1の画像データは、色データおよび深度データを含んでもよい。前記色データのみに基づいて前記対象物が検出されてもよい。前記対象物の位置は、前記色データと前記深度データとの組み合わせに基づいて決定されてもよい。
【0009】
前記方法は、前記第1の画像データを取得する間に、前記対象物を照明する光源をオンにすることをさらに含んでもよい。前記光源はLED光源であってもよい。前記光源は、前記第2の画像データを取得する前にオフにされてもよい。
【0010】
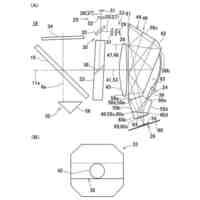
前記方法は、前記対象物の位置を決定した後、前記第2の画像データを取得する前に、ハイパースペクトルカメラを移動させることをさらに含んでもよい。前記第2の画像データは前記ハイパースペクトルカメラによって取得されてもよい。前記ハイパースペクトルカメラは、前記対象物の決定された位置に基づいて動かされてもよい。前記ハイパースペクトルカメラは直交アームによって動かされてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
電動作業車
19日前
株式会社クボタ
歩行型管理機
1か月前
株式会社クボタ
倉庫システム
6日前
株式会社クボタ
歩行型作業機
1か月前
株式会社クボタ
歩行型管理機
20日前
株式会社クボタ
歩行型管理機
20日前
株式会社クボタ
フロントローダ
1か月前
株式会社クボタケミックス
圃場管理システム
23日前
株式会社クボタ
操作機構および歩行型作業機
1か月前
株式会社クボタ
作業車のための改良したタンク
25日前
株式会社クボタ
操作システム、作業機、操作ユニット
1か月前
株式会社クボタ建設
シールドマシンおよびゲートユニット
18日前
株式会社クボタ
直交アームを有するモバイルカメラシステム
16日前
株式会社クボタ
作業車
3日前
株式会社クボタ
作業車
3日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
トラクタ
17日前
株式会社クボタ
トラクタ
1か月前
株式会社クボタ
トラクタ
1か月前
株式会社クボタ
トラクタ
1か月前
株式会社クボタ
コンバイン
1か月前
株式会社クボタ
電動作業車
10日前
株式会社クボタ
電動作業車
23日前
株式会社クボタ
粉粒体供給装置の制御パラメータの算出方法および粉粒体供給装置
18日前
株式会社クボタ
歪み領域推定装置、歪み領域推定方法、機械学習装置、及び機械学習方法
6日前
株式会社クボタ
作業管理装置および作業管理方法
1か月前
前澤給装工業株式会社
樹脂管用継手
24日前
株式会社IFG
単板試験器
27日前
個人
電気抵抗の測定方法
3日前
太陽誘電株式会社
検出装置
6日前
新光電子株式会社
検知装置
26日前
エイブリック株式会社
半導体装置
20日前
株式会社トプコン
測量装置
18日前
株式会社トプコン
測量装置
18日前
太陽誘電株式会社
検出装置
23日前
CKD株式会社
錠剤検査装置
10日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ