TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024103654
公報種別
公開特許公報(A)
公開日
2024-08-01
出願番号
2024088501,2022160979
出願日
2024-05-31,2019-10-07
発明の名称
計測精度算出装置、自己位置推定装置、制御方法、プログラム及び記憶媒体
出願人
パイオニア株式会社
代理人
個人
主分類
G01C
21/28 20060101AFI20240725BHJP(測定;試験)
要約
【課題】計測部による地物の計測精度を好適に算出可能な計測精度算出装置及び自己位置推定装置を提供する。
【解決手段】車載機1の自車位置推定部17は、ライダ2によるランドマークの計測結果である点群データを取得すると共に、地図DB10に含まれるランドマークの地物情報を取得する。そして、自車位置推定部17は、取得した点群データに基づき特定したランドマークのサイズと地物情報が示すランドマークのサイズとの差分に基づいて、ライダ2によるランドマークの計測精度を示す信頼度情報を算出する。
【選択図】図13
特許請求の範囲
【請求項1】
計測部による地物の計測結果を取得する第1取得部と、
地図データに含まれる前記地物の地物情報を取得する第2取得部と、
計測した前記計測結果と前記地物情報との比較結果に基づいて、前記計測部による前記地物の計測精度を示す精度情報を算出する算出部と、を有する計測精度算出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、計測部による計測の精度を算出する技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
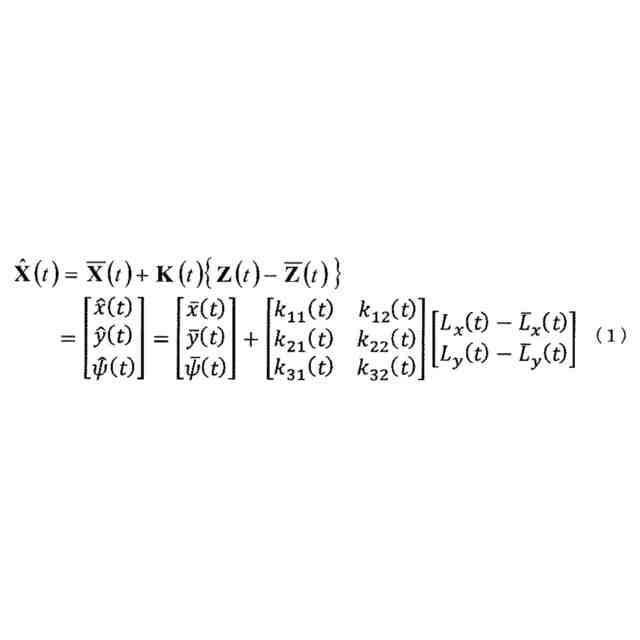
従来から、車両の進行先に設置される地物をレーダやカメラを用いて検出し、その検出結果に基づいて自車位置を校正する技術が知られている。例えば、特許文献1には、計測センサの出力と、予め地図上に登録された地物の位置情報とを照合させることで自己位置を推定する技術が開示されている。また、特許文献2には、カルマンフィルタを用いた自車位置推定技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-257742号公報
特開2017-72422号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自己位置推定処理において計測対象となる地物が他の地物と隣接している場合には、計測対象の地物と共に他の地物が計測データに含まれてしまい、計測結果の精度(正確性)が低下してしまうことがある。また、計測対象となる地物の一部にオクルージョンが発生した場合にも同様に、本来計測されるべき地物の一部が計測できなくなるため、計測結果の精度が低下してしまうことがある。
【0005】
本発明は、上記のような課題を解決するためになされたものであり、計測部による地物の計測精度を好適に算出可能な計測精度算出装置及び自己位置推定装置を提供することを主な目的とする。
【課題を解決するための手段】
【0006】
請求項に記載の発明は、計測精度算出装置であって、計測部による地物の計測結果を取得する第1取得部と、地図データに含まれる前記地物の地物情報を取得する第2取得部と、計測した前記計測結果と前記地物情報との比較結果に基づいて、前記計測部による前記地物の計測精度を示す精度情報を算出する算出部と、を有する。
【図面の簡単な説明】
【0007】
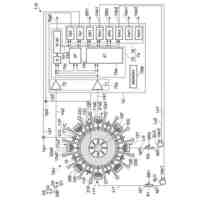
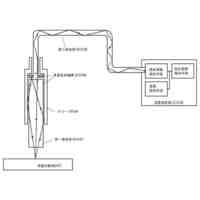
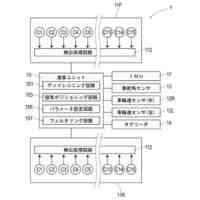
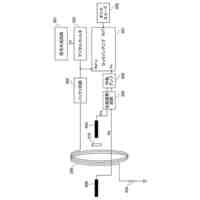
運転支援システムの概略構成図である。
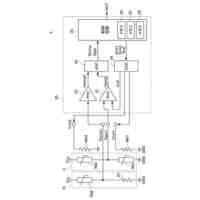
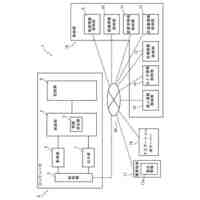
車載機の機能的構成を示すブロック図である。
地図データベースのデータ構造の一例を示す。
状態変数ベクトルを2次元直交座標で表した図である。
予測ステップと計測更新ステップとの概略的な関係を示す図である。
自車位置推定部の機能ブロックを示す。
信頼度情報のグラフを示す。
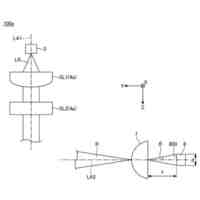
オクルージョンが発生した場合のライダのレーザ光の照射範囲を概略的に示した図である。
ランドマークとなる地物に隣接して他の地物が存在する場合のライダのレーザ光の照射範囲を概略的に示した図である。
2次元のワールド座標系及び車両座標系により表された車両とランドマークとの位置関係を示した図である。
車両から見てランドマークがほぼ正面を向いているときの信頼度情報の2次元グラフである。
車両から見てランドマークがやや横向きに近いときの信頼度情報の2次元グラフである。
自車位置推定処理を示すフローチャートである。
変形例1に係る信頼度情報のグラフを示す。
変形例2に係る信頼度情報のグラフを示す。
【発明を実施するための形態】
【0008】
本発明の好適な実施形態によれば、計測精度算出装置は、計測部による地物の計測結果を取得する第1取得部と、地図データに含まれる前記地物の地物情報を取得する第2取得部と、計測した地物のサイズと前記地物情報が示す地物のサイズとの差分に基づいて、前記計測部による前記地物の計測精度を示す精度情報を算出する算出部と、を有する。この態様により、計測精度算出装置は、計測対象の地物にオクルージョンが発生して一部の計測データが取得できなかった場合又は計測対象の地物に隣接する他の地物の計測データを計測対象の地物の計測データの一部として取得した場合のいずれにおいても、計測部による地物の計測精度を示す精度情報を的確に算出することができる。
【0009】
上記計測精度算出装置の一態様では、前記算出部は、前記差分が大きいほど、前記計測精度が低い精度情報を生成する。このようにすることで、計測対象の地物にオクルージョンが発生して一部の計測データが取得できなかった場合又は隣接地物の計測データを計測対象の地物の計測データの一部として取得した場合のいずれにおいても、計測精度が低いことを示す精度情報を好適に生成することができる。
【0010】
上記計測精度算出装置の一態様では、前記算出部は、前記差分と、移動体の進行方向と、前記地物情報が示す前記地物の法線方向とに基づき、前記移動体の進行方向と横方向のそれぞれに対する前記地物の計測精度を示す精度情報を生成する。一般に、移動体の進行方向に対する地物の向きによって、計測誤差が生じにくい方向と計測誤差が生じやすい方向とがそれぞれ生じる場合がある。従って、この態様によれば、計測精度算出装置は、移動体の進行方向と横方向のそれぞれに対する地物の計測精度を示す精度情報を好適に生成することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
半導体装置
15日前
太陽誘電株式会社
検出装置
1日前
株式会社トプコン
測量装置
13日前
株式会社トプコン
測量装置
13日前
太陽誘電株式会社
検出装置
18日前
スガ試験機株式会社
ガス腐食試験機
18日前
日本碍子株式会社
ガスセンサ
11日前
CKD株式会社
錠剤検査装置
5日前
株式会社東芝
センサ
1日前
株式会社キーエンス
超音波流量センサ
1日前
株式会社日立国際電気
試験装置
15日前
栗田工業株式会社
pH電極
20日前
TDK株式会社
ガスセンサ
20日前
中国電力株式会社
経路案内システム
19日前
ミツミ電機株式会社
測距装置
20日前
株式会社イシダ
電子秤
18日前
株式会社ジークエスト
感温センサー
1日前
大陽日酸株式会社
液面センサ
11日前
株式会社チノー
放射光導光型温度計
1日前
愛知製鋼株式会社
位置推定システム
4日前
株式会社トクヤマ
全固体型イオン選択性電極
11日前
東レ株式会社
センサー素子及びガスセンサー
4日前
中央精機株式会社
変角平行光投光装置
11日前
株式会社ヒロハマ
包装用容器の気密検査治具
7日前
ミネベアミツミ株式会社
測距装置
20日前
TDK株式会社
センサモジュール
7日前
トヨタ自動車株式会社
電力供給システム
18日前
TDK株式会社
磁気検出システム
7日前
株式会社イシダ
X線検査装置
1日前
三菱電機株式会社
腐食促進試験装置
7日前
株式会社SUBARU
ナビゲーション装置
15日前
エスペック株式会社
耐電圧試験装置
18日前
株式会社イシダ
計量装置
13日前
コムスキャンテクノ株式会社
X線CT装置
13日前
ホシデン株式会社
センサ装置
1日前
住友金属鉱山株式会社
試料の評価方法
20日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ