TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024087790
公報種別
公開特許公報(A)
公開日
2024-07-01
出願番号
2023210559
出願日
2023-12-13
発明の名称
足位置の補正方法、装置及び記憶媒体
出願人
富士通株式会社
代理人
個人
,
個人
主分類
G06T
7/20 20170101AFI20240624BHJP(計算;計数)
要約
【課題】本開示は、目標追跡における足位置の補正方法、装置及び記憶媒体を提供する。
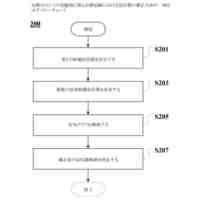
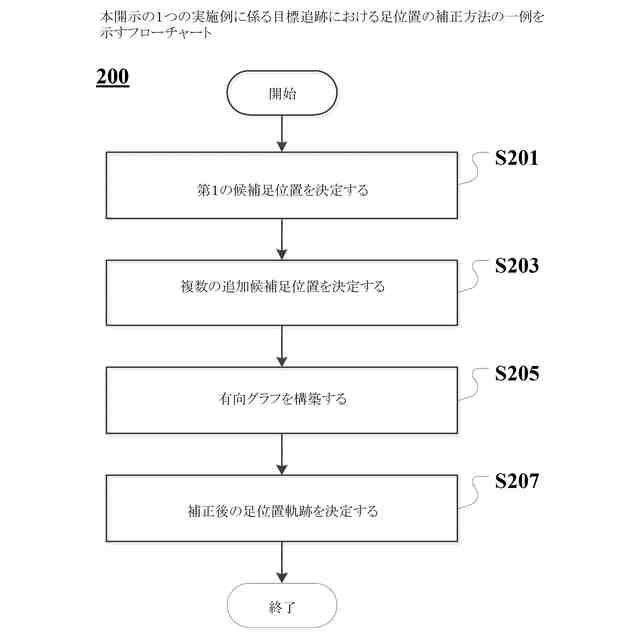
【解決手段】該方法は、少なくとも1つの目標が複数の棚が配置された空間内を移動する際に取り込まれた画像シーケンスに基づいて決定された少なくとも1つの目標のうちの1つの目標のトラックレットにおける複数の画像ブロックについて、各画像ブロックの外接枠を参照して画像ブロックの第1の候補足位置を決定するステップと、複数の画像ブロックについて、複数の棚の位置を参照して各画像ブロックの複数の追加候補足位置を決定するステップと、第1の候補足位置及び追加候補足位置を含む、複数の画像ブロックの候補足位置セットにおける候補足位置を頂点として、複数の画像ブロックのうちの開始画像ブロックから終了画像ブロックまでの有向グラフを構築するステップと、有向グラフの最小コスト経路に基づいて目標の補正後の足位置軌跡を決定するステップと、を含む。
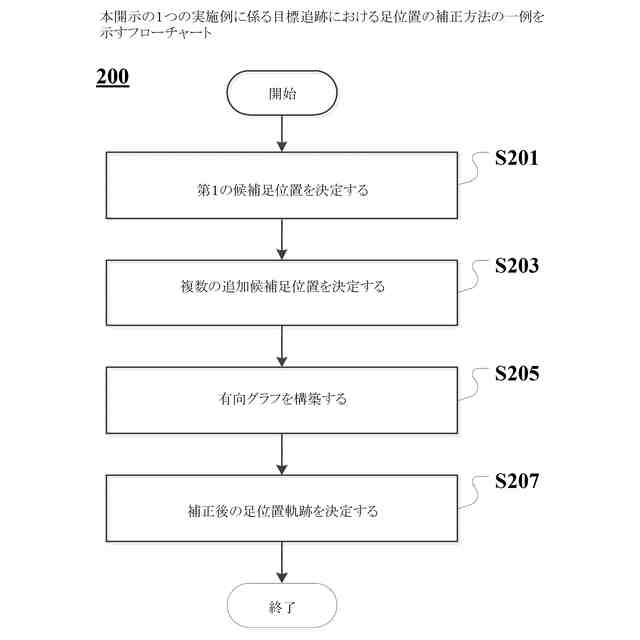
【選択図】図2
特許請求の範囲
【請求項1】
コンピュータが実行する、目標追跡における足位置の補正方法であって、
少なくとも1つの目標が複数の棚が配置された空間内を移動する際に取り込まれた画像シーケンスに基づいて決定された前記少なくとも1つの目標のうちの1つの目標のトラックレットにおける複数の画像ブロックについて、各画像ブロックの外接枠を参照して該画像ブロックの第1の候補足位置を決定するステップと、
前記複数の画像ブロックについて、前記複数の棚の位置を参照して各画像ブロックの複数の追加候補足位置を決定するステップと、
第1の候補足位置及び追加候補足位置を含む、前記複数の画像ブロックの候補足位置セットにおける候補足位置を頂点として、前記複数の画像ブロックのうちの開始画像ブロックから終了画像ブロックまでの有向グラフを構築するステップと、
前記有向グラフの最小コスト経路に基づいて前記目標の補正後の足位置軌跡を決定するステップと、を含む、方法。
続きを表示(約 3,600 文字)
【請求項2】
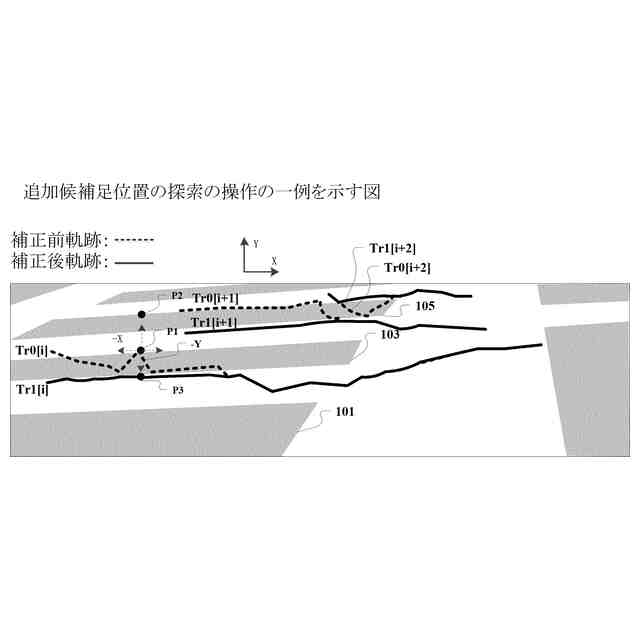
追加候補位置選択操作により、各画像ブロックの第2の候補足位置及び第3の候補足位置を該画像ブロックの2つの追加候補足位置として決定し、
前記追加候補位置選択操作は、
該画像ブロックの前記第1の候補足位置から、第1の方向に沿って前記第2の候補足位置を探索することと、
該画像ブロックの前記第1の候補足位置から、前記第1の方向とは反対の第2の方向に沿って前記第3の候補足位置を探索することと、を含み、
前記複数の棚の位置及び該画像ブロックの外接枠を参照して前記第2の候補足位置及び前記第3の候補足位置を探索する、請求項1に記載の方法。
【請求項3】
前記追加候補位置選択操作は、各画像ブロックの第4の候補足位置及び第5の候補足位置を該画像ブロックの他の2つの追加候補足位置として決定することをさらに含み、
該画像ブロックの前記第1の候補足位置から、前記第1の方向に垂直な第3の方向に沿って前記第4の候補足位置を探索し、
該画像ブロックの前記第1の候補足位置から、前記第3の方向とは反対の第4の方向に沿って前記第5の候補足位置を探索し、
前記複数の棚の位置及び該画像ブロックの外接枠を参照して前記第4の候補足位置及び前記第5の候補足位置を探索する、請求項2に記載の方法。
【請求項4】
該画像ブロックの前記第1の候補足位置から、第1の方向に沿って前記第2の候補足位置を探索する際に、
第1の条件を満たす第1の点が存在する場合、該第1の点の位置を前記第2の候補足位置として選択し、
前記第1の条件を満たす前記第1の点が存在しない場合、該第1の候補足位置及び該第1の候補足位置の直前の候補足位置に基づいて該第2の候補足位置を決定し、
前記第1の条件は、該第1の候補足位置から前記第1の方向に沿って1つの棚を通過して該棚の外の前記第1の点に到達し、且つ前記第1の点と該第1の候補足位置との距離と該第1の候補足位置に対応する対応画像ブロックの高さとの比が第1の所定閾値よりも小さいことであり、
該画像ブロックの前記第1の候補足位置から、第2の方向に沿って前記第3の候補足位置を探索する際に、
第2の条件を満たす第2の点が存在する場合、該第2の点の位置を前記第3の候補足位置として選択し、
前記第2の条件を満たす前記第2の点が存在しない場合、該第1の候補足位置及び該第1の候補足位置の直前の候補足位置に基づいて該第3の候補足位置を決定し、
前記第2の条件は、該第1の候補足位置から前記第2の方向に沿って1つの棚を通過して該棚の外の前記第2の点に到達し、且つ前記第2の点と該第1の候補足位置との距離と該第1の候補足位置に対応する対応画像ブロックの高さとの比が第2の所定閾値よりも小さいことである、請求項2に記載の方法。
【請求項5】
該画像ブロックの前記第1の候補足位置から、前記第1の方向に垂直な第3の方向に沿って前記第4の候補足位置を探索する際に、
第3の条件を満たす第3の点が存在する場合、該第3の点の位置を前記第4の候補足位置として選択し、
前記第3の条件を満たす前記第3の点が存在しない場合、該第1の候補足位置及び該第1の候補足位置の直前の候補足位置に基づいて該第4の候補足位置を決定し、
前記第3の条件は、該第1の候補足位置から前記第3の方向に沿って1つの棚を通過して該棚の外の前記第3の点に到達し、且つ前記第3の点と該第1の候補足位置との距離と該第1の候補足位置に対応する対応画像ブロックの幅との比が第3の所定閾値よりも小さいことであり、
該画像ブロックの前記第1の候補足位置から、前記第3の方向とは反対の第4の方向に沿って前記第5の候補足位置を探索する際に、
第4の条件を満たす第4の点が存在する場合、該第4の点の位置を前記第5の候補足位置として選択し、
前記第4の条件を満たす前記第4の点が存在しない場合、該第1の候補足位置及び該第1の候補足位置の直前の候補足位置に基づいて該第5の候補足位置を決定し、
前記第4の条件は、該第1の候補足位置から前記第4の方向に沿って1つの棚を通過して該棚の外の前記第4の点に到達し、且つ前記第4の点と該第1の候補足位置との距離と該第1の候補足位置に対応する対応画像ブロックの幅との比が第4の所定閾値よりも小さいことである、請求項3に記載の方法。
【請求項6】
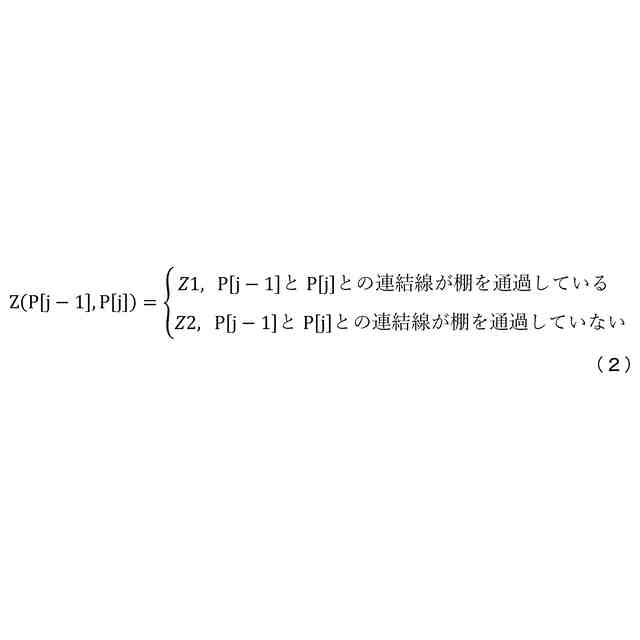
前記有向グラフにおける時間的に隣接する2つの候補足位置について、先行候補足位置から後続候補足位置までの辺のコスト関数は、前記先行候補足位置からそれに対応する第1の候補足位置までのユークリッド距離、前記後続候補足位置からそれに対応する第1の候補足位置までのユークリッド距離、及び前記先行候補足位置と前記後続候補足位置との連結線が棚を通過しているか否かに関連する、請求項1に記載の方法。
【請求項7】
前記先行候補足位置から前記後続候補足位置までの辺のコスト関数は、第1のコストと第2のコストと第3のコストとの合計であり、
前記第1のコストは、前記先行候補足位置から前記先行候補足位置に対応する第1の候補足位置までのユークリッド距離であり、
前記第2のコストは、前記後続候補足位置から前記後続候補足位置に対応する第1の候補足位置までのユークリッド距離であり、
前記第3のコストは、前記先行候補足位置と前記後続候補足位置との連結線が前記空間内の棚を通過しているか否かに関連する、請求項6に記載の方法。
【請求項8】
前記先行候補足位置と前記後続候補足位置との連結線が前記空間内の棚を通過している場合、前記第3のコストは第1の非負数に設定され、
前記先行候補足位置と前記後続候補足位置との連結線が前記空間内の棚を通過していない場合、前記第3のコストは第2の非負数に設定され、
前記第1の非負数及び前記第2の非負数は、前記第1の非負数と前記第2の非負数との差が前記複数の棚の画像空間における最大マッピング幅の3倍よりも大きくなるように設定される、請求項7に記載の方法。
【請求項9】
目標追跡における足位置の補正装置であって、
命令が記憶されたメモリと、
前記メモリに接続され、且つ前記命令を実行するように構成された少なくとも1つのプロセッサと、を含み、
前記少なくとも1つのプロセッサは、
少なくとも1つの目標が複数の棚が配置された空間内を移動する際に取り込まれた画像シーケンスに基づいて決定された前記少なくとも1つの目標のうちの1つの目標のトラックレットにおける複数の画像ブロックについて、各画像ブロックの外接枠を参照して該画像ブロックの第1の候補足位置を決定するステップと、
前記複数の画像ブロックについて、前記複数の棚の位置を参照して各画像ブロックの複数の追加候補足位置を決定するステップと、
第1の候補足位置及び追加候補足位置を含む、前記複数の画像ブロックの候補足位置セットにおける候補足位置を頂点として、前記複数の画像ブロックのうちの開始画像ブロックから終了画像ブロックまでの有向グラフを構築するステップと、
前記有向グラフの最小コスト経路に基づいて前記目標の補正後の足位置軌跡を決定するステップと、を実現するように前記命令を実行する、装置。
【請求項10】
プログラムが記憶されたコンピュータ読み取り可能な非一時的な記憶媒体であって、前記プログラムがコンピュータにより実行される際に、前記コンピュータは、
少なくとも1つの目標が複数の棚が配置された空間内を移動する際に取り込まれた画像シーケンスに基づいて決定された前記少なくとも1つの目標のうちの1つの目標のトラックレットにおける複数の画像ブロックについて、各画像ブロックの外接枠を参照して該画像ブロックの第1の候補足位置を決定するステップと、
前記複数の画像ブロックについて、前記複数の棚の位置を参照して各画像ブロックの複数の追加候補足位置を決定するステップと、
第1の候補足位置及び追加候補足位置を含む、前記複数の画像ブロックの候補足位置セットにおける候補足位置を頂点として、前記複数の画像ブロックのうちの開始画像ブロックから終了画像ブロックまでの有向グラフを構築するステップと、
前記有向グラフの最小コスト経路に基づいて前記目標の補正後の足位置軌跡を決定するステップと、を実現する、記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理及びコンピュータビジョンに関し、具体的には、コンピュータが実行する目標追跡における足位置の補正方法、装置及び記憶媒体に関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
コンピュータ科学及び人工知能の発展に伴い、コンピュータビジョン技術はさらに発展した。コンピュータビジョン技術は、カメラにより取り込まれた画像シーケンス(ビデオ)に対して目標(ターゲット)追跡を行う目標追跡技術を含む。目標追跡技術は、ビデオにおける歩行者、自動車及び/又は動物などの複数の関心のあるタイプの目標を検出し、目標に基づいて識別子(ID)を付与して、異なる目標の軌跡を取得することができる。
【0003】
マルチ目標追跡では、入力ビデオについて、目標の追跡結果を出力する。追跡結果画像において、各目標は、例えば、対応するID識別情報を有する矩形の外接枠で示される。ビデオの複数のフレームの画像シーケンスにおいて、同一のIDの外接枠の移動軌跡(例えば、外接枠の中心点の移動軌跡、外接枠の底辺中点の移動軌跡、又は外接枠の頂辺中点の移動軌跡)を該IDの目標の軌跡として見なしてもよい。該複数のフレームにおいて、該ID外接枠により示される複数の画像ブロックの画像ブロックシーケンスは、該IDの目標のトラックレット(tracklet)と称される。トラックレットにおいて、各画像ブロックは、該トラックレットの1つのフレームの画像と見されてもよく、各フレームの画像に目標軌跡を表現する時間情報及び空間位置情報の情報を割り当ててもよい。言い換えれば、目標軌跡上の軌跡点は、位置属性及び時間属性を有してもよい。
【0004】
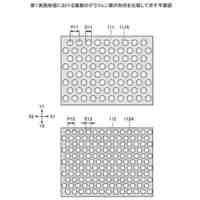
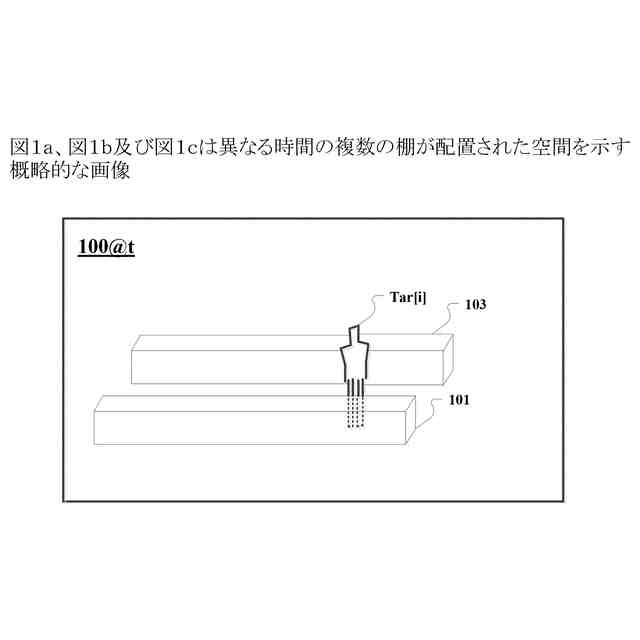
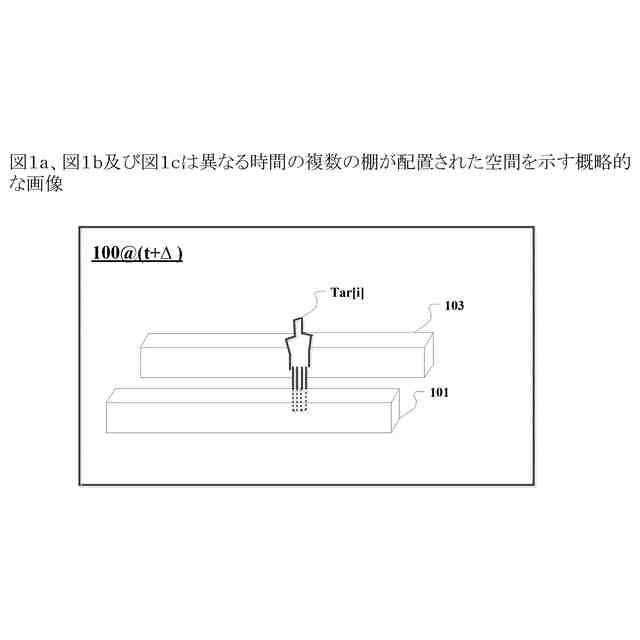
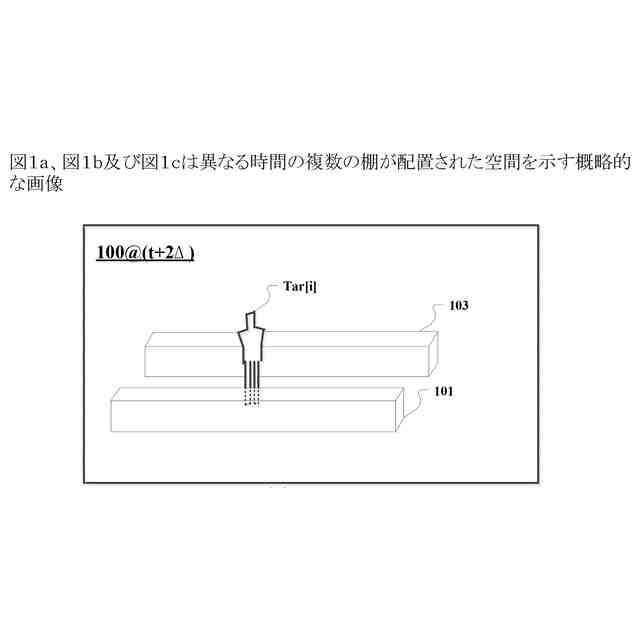
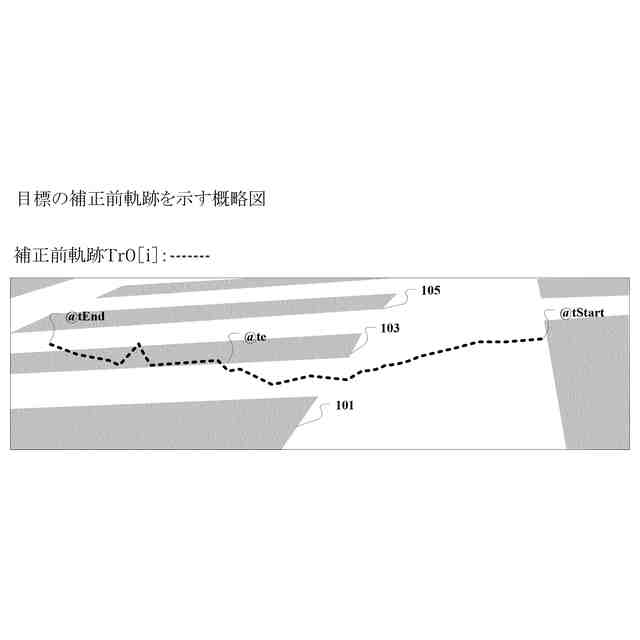
通常、商品を保管又は陳列する空間(例えば、オフラインの販売場所)には、監視カメラが設置されている。なお、目標追跡モデルを用いて、空間内の関心のあるタイプの目標の空間内の移動軌跡を取得することができる。目標Tar[i]の軌跡は、目標追跡モデルにより取得された目標Tar[i]についてのトラックレットを用いて決定されてもよい。例えば、トラックレットにおける各画像ブロックの底辺の中点を用いて表されてもよい。該空間には、通常1つ以上の棚が配置されており、棚の上には製品(商品)が配置されている。棚の存在により、理想的には、目標(例えば、顧客)は隣接する監視ビデオフレームにより規定される時間内に棚の第1の側から棚の第2の側に突然変化することができず、顧客の足が棚の所在する領域に位置することもできない。しかし、実際には、目標追跡モデルに基づいて決定された軌跡には、例えば、同一の目標の時間的に隣接する2つの軌跡点が同一の棚の両側に出現するような誤りが発生する可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0005】
以下は、本開示の態様を基本的に理解させるために、本開示の簡単な概要を説明する。なお、この簡単な概要は、本開示を網羅的な概要ではなく、本開示のポイント又は重要な部分を意図的に特定するものではなく、本開示の範囲を意図的に限定するものではなく、後述するより詳細的な説明の前文として、単なる概念を簡単な形で説明することを目的とする。
【0006】
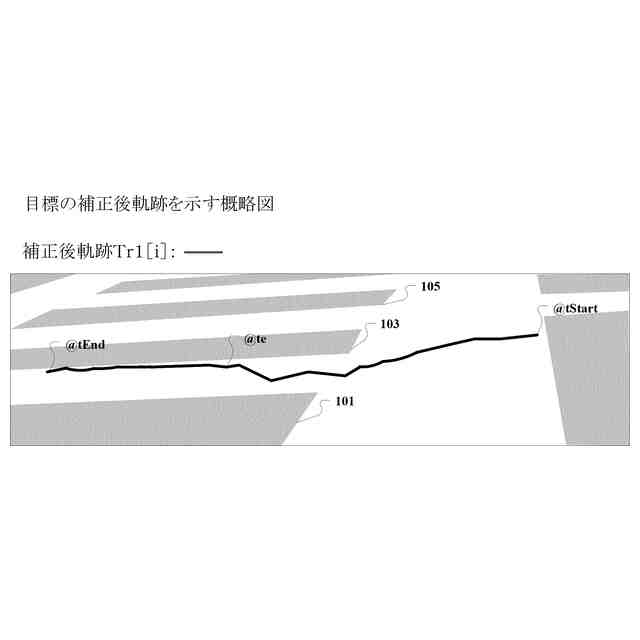
目標追跡モデルにより決定された軌跡に誤りがある可能性があることを考慮して、決定された軌跡の正確度を改善するために軌跡を補正することが望ましい。本発明の発明者は、複数の棚が配置された空間における目標追跡を検討し、本開示の技術的解決策を考案した。本開示の実施例が解決しようとする技術的課題は、以下の少なくとも1つの課題を含むが、これらに限定されない。誤った軌跡点を低減させ、目標追跡の正確度を改善する。
【課題を解決するための手段】
【0007】
本開示の1つの態様では、コンピュータが実行する、目標追跡における足位置の補正方法であって、少なくとも1つの目標が複数の棚が配置された空間内を移動する際に取り込まれた画像シーケンスに基づいて決定された前記少なくとも1つの目標のうちの1つの目標のトラックレットにおける複数の画像ブロックについて、各画像ブロックの外接枠を参照して該画像ブロックの第1の候補足位置を決定するステップと、前記複数の画像ブロックについて、前記複数の棚の位置を参照して各画像ブロックの複数の追加候補足位置を決定するステップと、第1の候補足位置及び追加候補足位置を含む、前記複数の画像ブロックの候補足位置セットにおける候補足位置を頂点として、前記複数の画像ブロックのうちの開始画像ブロックから終了画像ブロックまでの有向グラフを構築するステップと、前記有向グラフの最小コスト経路に基づいて前記目標の補正後の足位置軌跡を決定するステップと、を含む、方法を提供する。
【0008】
本開示のもう1つの態様では、目標追跡における足位置の補正装置であって、命令が記憶されたメモリと、前記メモリに接続され、且つ前記命令を実行するように構成された少なくとも1つのプロセッサと、を含み、前記少なくとも1つのプロセッサは、少なくとも1つの目標が複数の棚が配置された空間内を移動する際に取り込まれた画像シーケンスに基づいて決定された前記少なくとも1つの目標のうちの1つの目標のトラックレットにおける複数の画像ブロックについて、各画像ブロックの外接枠を参照して該画像ブロックの第1の候補足位置を決定するステップと、前記複数の画像ブロックについて、前記複数の棚の位置を参照して各画像ブロックの複数の追加候補足位置を決定するステップと、第1の候補足位置及び追加候補足位置を含む、前記複数の画像ブロックの候補足位置セットにおける候補足位置を頂点として、前記複数の画像ブロックのうちの開始画像ブロックから終了画像ブロックまでの有向グラフを構築するステップと、前記有向グラフの最小コスト経路に基づいて前記目標の補正後の足位置軌跡を決定するステップと、を実現するように前記命令を実行する、装置を提供する。
【0009】
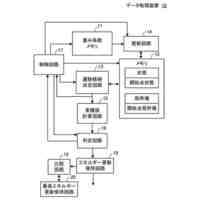
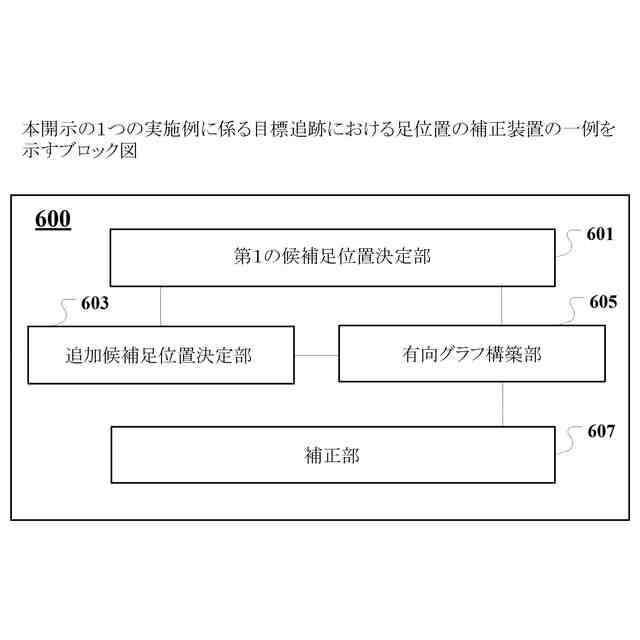
本開示のもう1つの態様では、目標追跡における足位置の補正装置であって、少なくとも1つの目標が複数の棚が配置された空間内を移動する際に取り込まれた画像シーケンスに基づいて決定された前記少なくとも1つの目標のうちの1つの目標のトラックレットにおける複数の画像ブロックについて、各画像ブロックの外接枠を参照して該画像ブロックの第1の候補足位置を決定する第1の候補足位置決定部と、前記複数の画像ブロックについて、前記複数の棚の位置を参照して各画像ブロックの複数の追加候補足位置を決定する追加候補足位置決定部と、第1の候補足位置及び追加候補足位置を含む、前記複数の画像ブロックの候補足位置セットにおける候補足位置を頂点として、前記複数の画像ブロックのうちの開始画像ブロックから終了画像ブロックまでの有向グラフを構築する有向グラフ構築部と、前記有向グラフの最小コスト経路に基づいて前記目標の補正後の足位置軌跡を決定する補正部と、を含む、装置を提供する。
【0010】
本開示のもう1つの態様では、プログラムが記憶されたコンピュータ読み取り可能な非一時的な記憶媒体であって、前記プログラムがコンピュータにより実行される際に、前記コンピュータは、少なくとも1つの目標が複数の棚が配置された空間内を移動する際に取り込まれた画像シーケンスに基づいて決定された前記少なくとも1つの目標のうちの1つの目標のトラックレットにおける複数の画像ブロックについて、各画像ブロックの外接枠を参照して該画像ブロックの第1の候補足位置を決定するステップと、前記複数の画像ブロックについて、前記複数の棚の位置を参照して各画像ブロックの複数の追加候補足位置を決定するステップと、第1の候補足位置及び追加候補足位置を含む、前記複数の画像ブロックの候補足位置セットにおける候補足位置を頂点として、前記複数の画像ブロックのうちの開始画像ブロックから終了画像ブロックまでの有向グラフを構築するステップと、前記有向グラフの最小コスト経路に基づいて前記目標の補正後の足位置軌跡を決定するステップと、を実現する、記憶媒体を提供する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
富士通株式会社
基板連結構造
1か月前
富士通株式会社
アバター制御
1か月前
富士通株式会社
画像処理方法
23日前
富士通株式会社
光信号パワー利得
1か月前
富士通株式会社
増幅装置及び増幅方法
24日前
富士通株式会社
演算装置および演算方法
28日前
富士通株式会社
演算回路及び演算処理方法
24日前
富士通株式会社
物体検出システム及び方法
29日前
富士通株式会社
電子装置及び改竄検知方法
21日前
富士通株式会社
情報処理装置及び情報処理方法
今日
富士通株式会社
光伝送システムでの異常の位置特定
1か月前
富士通株式会社
分散学習プログラム、方法、及び装置
9日前
富士通株式会社
表示制御方法及び表示制御プログラム
9日前
富士通株式会社
足位置の補正方法、装置及び記憶媒体
3日前
富士通株式会社
半導体装置及び半導体装置の製造方法
1か月前
富士通株式会社
病変検出方法および病変検出プログラム
24日前
富士通株式会社
情報処理方法および情報処理プログラム
23日前
富士通株式会社
情報処理プログラムおよび情報処理装置
15日前
富士通株式会社
移相量調整装置、及び、移相量調整方法
1か月前
富士通株式会社
スイッチング電源、増幅装置及び通信装置
23日前
富士通株式会社
プログラム、算出方法および情報処理装置
16日前
富士通株式会社
情報処理装置,プログラムおよび制御方法
今日
富士通株式会社
自動化されたカスタム特徴エンジニアリング
1か月前
富士通株式会社
物品数量を検出する装置と方法及び電子機器
28日前
富士通株式会社
物品数量を検出する装置と方法及び電子機器
28日前
富士通株式会社
クエリ実行方法およびクエリ実行プログラム
1か月前
富士通株式会社
働きかけ表示方法、働きかけ表示プログラム
24日前
富士通株式会社
車両経路選択問題及びその変形例の経路生成
21日前
富士通株式会社
3次元人体動的着装モデル推定装置及び方法
1か月前
富士通株式会社
特定プログラム、特定方法および情報処理装置
今日
富士通株式会社
制御方法、制御プログラムおよび情報処理装置
2日前
富士通株式会社
データ処理装置、プログラム及びデータ処理方法
14日前
富士通株式会社
データ処理装置、プログラム及びデータ処理方法
27日前
富士通株式会社
データ処理装置、プログラム及びデータ処理方法
24日前
富士通株式会社
カスタム特徴量エンジニアリングのための単位予測
1か月前
富士通株式会社
グラフェン光素子及びグラフェン光素子の製造方法
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ