TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024085822
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022200570
出願日
2022-12-15
発明の名称
車両のガタ通過期間の推定装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
B60K
17/04 20060101AFI20240620BHJP(車両一般)
要約
【課題】車両のガタ通過期間を推定する。
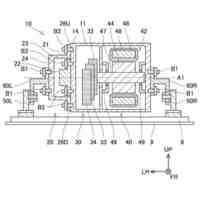
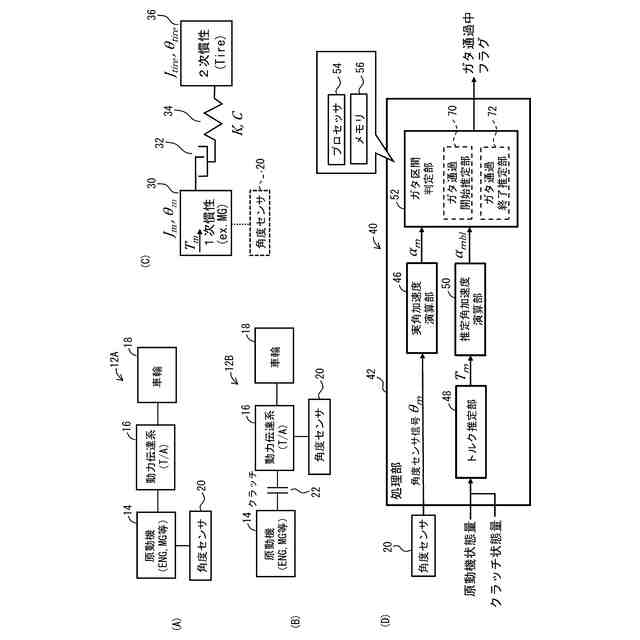
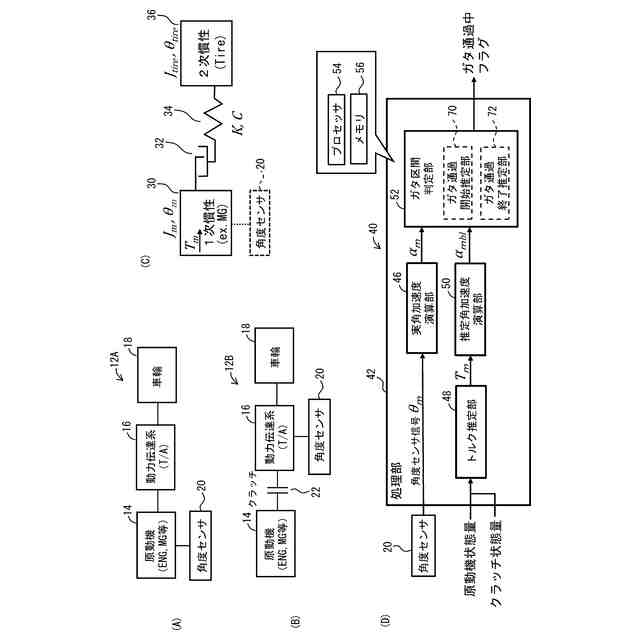
【解決手段】駆動源14から駆動輪18までの動力伝達経路上に互いに噛み合う複数の機械要素が設けられ、それらの間にガタ32が存在する車両に適用され、駆動源14を駆動させた際のガタ32の詰まり始めから詰まり終わりまでのガタ通過期間を推定する推定装置40である。推定装置40は、ガタ32よりも駆動源側に位置する駆動側慣性体30の実回転角θ
m
を検出する角度センサ20と、実回転角θ
m
から駆動側慣性体30の実角加速度α
m
を求める演算部46と、駆動側慣性体30の発生トルクT
m
を推定するトルク推定部48と、駆動側慣性体30のイナーシャJ
m
と発生トルクT
m
から、ガタ通過期間中の駆動側慣性体30の推定角加速度α
mbl
を求める演算部50と、実角加速度α
m
と推定角加速度α
mbl
の差分が閾値以内である場合に、車両がガタ通過期間にあると判定する判定部52とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
駆動源から駆動輪までの動力伝達経路上に互いに噛み合う複数の機械要素が設けられており、互いに噛み合う複数の前記機械要素の間にガタが存在する車両に適用され、前記駆動源を駆動させた際の前記ガタが詰まり始める時点から前記ガタが詰まり終える時点までのガタ通過期間を推定する装置であって、
前記ガタよりも駆動源側に位置する駆動側慣性体の実回転角を検出する角度センサと、
前記実回転角に基づいて前記駆動側慣性体の実角加速度を演算する実角加速度演算部と、
前記駆動源の状態に基づいて前記駆動側慣性体の発生トルクを推定するトルク推定部と、
前記駆動側慣性体におけるイナーシャと前記発生トルクに基づいて、前記ガタ通過期間中の前記駆動側慣性体の推定角加速度を演算する推定角加速度演算部と、
前記実角加速度と前記推定角加速度の差分が予め定められた閾値以内である場合に、前記車両が前記ガタ通過期間にあると判定する判定部と、を備える、
ことを特徴とする車両のガタ通過期間の推定装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の車両のガタ通過期間の推定装置であって、
前記駆動源はモータであり、
前記角度センサはレゾルバであり、前記レゾルバは、前記実回転角として、前記モータのロータの回転角を検出し、
前記実角加速度演算部は、前記実角加速度として、前記モータのロータの角加速度を演算し、
前記トルク推定部は、前記発生トルクとして、前記モータの発生トルクを推定する、
ことを特徴とする車両のガタ通過期間の推定装置。
【請求項3】
請求項1に記載の車両のガタ通過期間の推定装置であって、
前記駆動源はエンジンであり、
前記角度センサはクランク角センサであり、前記クランク角センサは、前記実回転角として、前記エンジンのクランクシャフトの回転角を検出し、
前記実角加速度演算部は、前記実角加速度として、前記エンジンのクランクシャフトの角加速度を演算し、
前記トルク推定部は、前記発生トルクとして、前記エンジンの発生トルクを推定する、
ことを特徴とする車両のガタ通過期間の推定装置。
【請求項4】
請求項1に記載の車両のガタ通過期間の推定装置であって、
前記駆動側慣性体は、前記駆動源の回転要素と、前記回転要素の駆動力を受けるクラッチと、前記クラッチの下流であって前記ガタよりも前記クラッチ側に位置するクラッチ側慣性体とを含み、
前記角度センサは、前記実回転角として、前記クラッチ側慣性体の回転角を検出し、
前記実角加速度演算部は、前記実角加速度として、前記クラッチ側慣性体の角加速度を演算し、
前記トルク推定部は、前記駆動源の状態と前記クラッチの係合状態に基づいて、前記発生トルクとして、前記クラッチ側慣性体の発生トルクを推定する、
ことを特徴とする車両のガタ通過期間の推定装置。
【請求項5】
駆動源から駆動輪までの動力伝達経路上に互いに噛み合う複数の機械要素が設けられており、互いに噛み合う複数の前記機械要素の間にガタが存在する車両に適用され、前記駆動源を駆動させた際の前記ガタが詰まり始める時点から前記ガタが詰まり終える時点までのガタ通過期間を推定する装置であって、
前記ガタよりも駆動源側に位置する駆動側慣性体の実回転角を検出する角度センサと、
前記実回転角に基づいて前記駆動側慣性体の実角加速度を演算する実角加速度演算部と、
前記駆動源の状態に基づいて前記駆動側慣性体の発生トルクを推定するトルク推定部と、
前記駆動側慣性体におけるイナーシャと前記発生トルクに基づいて、前記駆動側慣性体の推定角加速度を演算する推定角加速度演算部と、
前記実角加速度と前記推定角加速度の差分が予め定められた閾値以内に最初になった時点を、前記ガタが詰まり始めた時点と推定するガタ通過開始推定部と、
前記ガタが詰まり終えた時点を推定するガタ通過終了推定部と、を備え、
前記ガタ通過終了推定部は、
前記駆動輪の実角速度に対する前記駆動側慣性体の実角速度の相対角速度に基づいて、前記ガタ通過開始推定部により推定された、前記ガタが詰まり始めた時点後の前記駆動輪に対する前記駆動側慣性体の積算相対角度を算出し、
算出した前記積算相対角度が予め定められたガタ量に到達した時点を前記ガタが詰まり終えた時点と推定する、
ことを特徴とする車両のガタ通過期間の推定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、駆動源から駆動輪までの動力伝達経路にガタが存在する車両に適用され、駆動源が駆動した際のガタの詰まり開始から終了までのガタ通過期間を推定する装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
車両は、駆動源から駆動輪までの動力伝達経路上に互いに噛み合うギヤやスプライン等の機械要素を有する。これらの機械要素の間には、ガタ(バックラッシュ)が設けられている。車両が減速から加速する場合、ガタにより、車両の動力伝達系は駆動源のトルクが駆動輪に伝達されないガタ通過期間(不感帯)に入る。そして、ガタが詰まる(ガタ通過期間を終える)と、駆動源のトルクが駆動輪に伝達されるようになる。
【0003】
特許文献1には、電動モータを制御する制御装置に関し、制御装置が、複数の動力伝達部材間のバックラッシュが詰まるタイミングを推定し、そのタイミングの到来に合わせて、バックラッシュの詰まりに起因して動力伝達系に発生する振動を抑制するための補正トルクを、電動モータの基本指令トルクに与える構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-27643号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
車両のガタ通過期間を簡素な構成で推定できる装置が望まれている。
【0006】
本発明の目的は、車両のガタ通過期間を簡素な構成で推定できる装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明に係る車両のガタ通過期間の推定装置は、駆動源から駆動輪までの動力伝達経路上に互いに噛み合う複数の機械要素が設けられており、互いに噛み合う複数の前記機械要素の間にガタが存在する車両に適用され、前記駆動源を駆動させた際の前記ガタが詰まり始める時点から前記ガタが詰まり終える時点までのガタ通過期間を推定する装置であって、前記ガタよりも駆動源側に位置する駆動側慣性体の実回転角を検出する角度センサと、前記実回転角に基づいて前記駆動側慣性体の実角加速度を演算する実角加速度演算部と、前記駆動源の状態に基づいて前記駆動側慣性体の発生トルクを推定するトルク推定部と、前記駆動側慣性体におけるイナーシャと前記発生トルクに基づいて、前記ガタ通過期間中の前記駆動側慣性体の推定角加速度を演算する推定角加速度演算部と、前記実角加速度と前記推定角加速度の差分が予め定められた閾値以内である場合に、前記車両が前記ガタ通過期間にあると判定する判定部と、を備える、ことを特徴とする。
【0008】
本発明に係る車両のガタ通過期間の推定装置において、前記駆動源はモータであり、前記角度センサはレゾルバであり、前記レゾルバは、前記実回転角として、前記モータのロータの回転角を検出し、前記実角加速度演算部は、前記実角加速度として、前記モータのロータの角加速度を演算し、前記トルク推定部は、前記発生トルクとして、前記モータの発生トルクを推定する、としてもよい。
【0009】
本発明に係る車両のガタ通過期間の推定装置において、前記駆動源はエンジンであり、前記角度センサはクランク角センサであり、前記クランク角センサは、前記実回転角として、前記エンジンのクランクシャフトの回転角を検出し、前記実角加速度演算部は、前記実角加速度として、前記エンジンのクランクシャフトの角加速度を演算し、前記トルク推定部は、前記発生トルクとして、前記エンジンの発生トルクを推定する、としてもよい。
【0010】
本発明に係る車両のガタ通過期間の推定装置において、前記駆動側慣性体は、前記駆動源の回転要素と、前記回転要素の駆動力を受けるクラッチと、前記クラッチの下流であって前記ガタよりも前記クラッチ側に位置するクラッチ側慣性体とを含み、前記角度センサは、前記実回転角として、前記クラッチ側慣性体の回転角を検出し、前記実角加速度演算部は、前記実角加速度として、前記クラッチ側慣性体の角加速度を演算し、前記トルク推定部は、前記駆動源の状態と前記クラッチの係合状態に基づいて、前記発生トルクとして、前記クラッチ側慣性体の発生トルクを推定する、としてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
電動車
11日前
トヨタ自動車株式会社
電極体
5日前
トヨタ自動車株式会社
自動車
4日前
トヨタ自動車株式会社
モータ
12日前
トヨタ自動車株式会社
ロータ
12日前
トヨタ自動車株式会社
サーバ
11日前
トヨタ自動車株式会社
二次電池
11日前
トヨタ自動車株式会社
二次電池
7日前
トヨタ自動車株式会社
システム
4日前
トヨタ自動車株式会社
伸縮機構
11日前
トヨタ自動車株式会社
電源装置
11日前
トヨタ自動車株式会社
通知装置
今日
トヨタ自動車株式会社
駆動装置
4日前
トヨタ自動車株式会社
駆動装置
4日前
トヨタ自動車株式会社
制御方法
5日前
トヨタ自動車株式会社
判定装置
5日前
トヨタ自動車株式会社
シャフト
7日前
トヨタ自動車株式会社
草刈装置
5日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
加飾フィン
7日前
トヨタ自動車株式会社
高圧タンク
5日前
トヨタ自動車株式会社
管理サーバ
11日前
トヨタ自動車株式会社
水電解装置
5日前
トヨタ自動車株式会社
ハンド構造
11日前
トヨタ自動車株式会社
リアクトル
4日前
トヨタ自動車株式会社
電気自動車
11日前
トヨタ自動車株式会社
充電制御装置
5日前
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
車両制御装置
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ