TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024081086
公報種別
公開特許公報(A)
公開日
2024-06-17
出願番号
2022194544
出願日
2022-12-05
発明の名称
駐車支援装置
出願人
日本製鉄株式会社
代理人
弁理士法人ドライト国際特許事務所
主分類
B60W
30/06 20060101AFI20240610BHJP(車両一般)
要約
【課題】高精度に車両を駐車領域に駐車させることができる駐車支援装置を提供する。
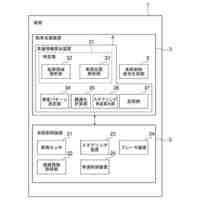
【解決手段】車両を駐車領域に自動で駐車させる駐車支援装置3であって、駐車領域の駐車目標地点の位置と車両進入方向を特定する駐車領域解析部32と、車両の車両基準点の位置と車両の進行方向を特定する車両位置解析部33と、駐車目標地点の位置及び車両基準点の位置に基づいて、各時間における車両の速度を決定する、速度パターン決定部34と、各時間における車両の速度を用い、車両の進行方向の曲率を決定変数とした、線形時変状態方程式を用いた最適化問題を解くことで、決定変数を算出する、最適化計算部35と、決定変数に基づいて、車両のステアリング角度を算出する、ステアリング角度算出部36と、車両のステアリング角度に基づいて、車両を制御し、車両を駐車領域に駐車させる車両制御信号生成部37と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
車両を駐車領域に自動で駐車させる駐車支援装置であって、
前記駐車領域の駐車目標地点の位置と車両進入方向を特定する駐車領域解析部と、
前記車両の車両基準点の位置と前記車両の進行方向を特定する車両位置解析部と、
前記駐車目標地点の位置及び前記車両基準点の位置に基づいて、各時間における前記車両の速度を決定する、速度パターン決定部と、
前記各時間における前記車両の速度を用い、前記車両の進行方向の曲率を決定変数とした、線形時変状態方程式を用いた最適化問題を解くことで、前記決定変数を算出する、最適化計算部と、
前記決定変数に基づいて、前記車両のステアリング角度を算出する、ステアリング角度算出部と、
前記車両のステアリング角度に基づいて、前記車両を制御し、前記車両を前記駐車領域に駐車させる車両制御信号生成部と、
を有する、駐車支援装置。
続きを表示(約 540 文字)
【請求項2】
前記速度パターン決定部は、
車両センサから取得した前記車両の現在時刻での速度、前記駐車目標地点の位置、及び、前記車両基準点の現在時刻での位置に基づいて、前記車両の現在時刻での挙動が反映された、時間に応じた前記車両の速度の変化を定めた速度パターンを決定し、前記速度パターンを前記各時間における前記車両の速度とする、請求項1に記載の駐車支援装置。
【請求項3】
前記最適化計算部は、
前記車両の進行方向と前記車両進入方向とがなす角度が0度に近いと見なして、最適化問題を解く、請求項1に記載の駐車支援装置。
【請求項4】
前記最適化計算部は、
前記車両が前記駐車領域からの幅方向の逸脱を回避するための制約条件として、前記車両基準点の位置と前記駐車目標地点の位置との、前記車両の幅方向の距離を用いる、請求項1~3のいずれか一項に記載の駐車支援装置。
【請求項5】
前記最適化計算部は、
前記車両が前記駐車領域からの幅方向の逸脱を回避するための制約条件として、前記車両の先頭の位置と前記駐車目標地点の位置との、前記車両の幅方向の距離を用いる、請求項1~3のいずれか一項に記載の駐車支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両を前方又は後方に移動させることで駐車領域に自動で駐車させる駐車支援装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、運転者が運転操作を行わなくてもコンピュータによる制御により自動走行する自動運転車(以下、単に車両とも称する)の開発が進んでいる。このような車両では、車道からはみ出さずに目標経路に沿って自動的に走行する自動走行技術の他にも、予め決められた車庫(以下、駐車領域とも称する)に自動的に駐車させる自動駐車技術の開発も進んでいる。例えば、非特許文献1には、車両のダイナミクス(挙動)を表す非線形状態方程式を用いて、評価関数の値を最小にするような決定変数を求める最適化計算を行うことで、決定変数に含まれるステアリング角速度と前後加速度を求めることで、駐車支援処理に用いる支援情報を算出し、算出したステアリング角速度と車両の前後方向の加速度を用いて車両を駐車支援する技術が開示されている。
【先行技術文献】
【非特許文献】
【0003】
Maksym Diachuk, Said M.Easa, Joel Bannis, "Path and Control Planning for Autonomous Vehicles in Restricted Space and Low Speed", Infrastructures 2020, 5(5), 42
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1に開示されている技術によれば、車両を駐車領域まで導く目標経路、及び、その目標経路を達成するためのステアリング角速度と車両の前後方向の加速度を算出することができる。しかしながら、車両の駐車支援を実際に行うためには、短い周期で非線形状態方程式の決定変数を求める最適化計算を繰り返し行う必要がある。精度よく駐車支援を行うためには最適化計算の計算周期(制御周期とも称する)が短いことが好ましいが、非特許文献1に開示された技術は非線形状態方程式を用いているため決定変数を求めるための計算量が多く、その分、計算周期も長くなってしまう。そのため、車両を駐車領域に駐車させる際の車両の速度及びステアリング角度を求める演算処理時間が長くなり、車両を駐車領域に駐車させるのに要する時間が長くなってしまうという課題がある。
【0005】
本発明は、このような課題に鑑みてなされたものであり、線形状態方程式を用いて、従来よりも高精度に車両を駐車領域に駐車させることができる駐車支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の駐車支援の用いる駐車支援装置は、車両を駐車領域に自動で駐車させる駐車支援装置であって、前記駐車領域の駐車目標地点の位置と車両進入方向を特定する駐車領域解析部と、前記車両の車両基準点の位置と前記車両の進行方向を特定する車両位置解析部と、前記駐車目標地点の位置及び前記車両基準点の位置に基づいて、各時間における前記車両の速度を決定する、速度パターン決定部と、前記各時間における前記車両の速度を用い、前記車両の進行方向の曲率を決定変数とした、線形時変状態方程式を用いた最適化問題を解くことで、前記決定変数を算出する、最適化計算部と、前記決定変数に基づいて、前記車両のステアリング角度を算出する、ステアリング角度算出部と、前記車両のステアリング角度に基づいて、前記車両を制御し、前記車両を前記駐車領域に駐車させる車両制御信号生成部と、を有する。
【発明の効果】
【0007】
本発明によれば、車両の速度パターンを予め決定し、車両の挙動を線形状態方程式で表現し、2次式の評価関数の値を最小又は最大にする2次計画問題を解くようにしたことで、車両を駐車領域に駐車させる際の車両の速度及びステアリング角度を従来よりも短時間で求めることができ、その分、従来よりも高精度に車両を駐車領域に駐車させることができる。
【図面の簡単な説明】
【0008】
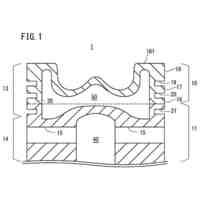
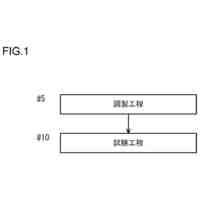
本実施形態に係る駐車支援装置を有する車両の回路構成を示すブロック図である。
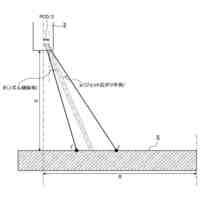
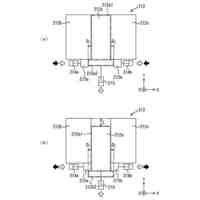
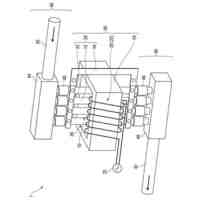
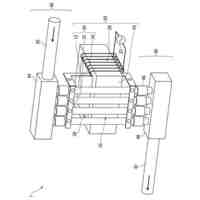
(a)は、駐車支援処理の開始前の車両の初期状態を示す概略図であり、(b)は、駐車支援処理中の車両の状態を示す概略図であり、(c)は、駐車支援処理完了時における車両の状態を示す概略図である。
(a)は、車両が停止している状態の速度パターンの概略図であり、(b)は、車両が加速中の状態の速度パターンの概略図であり、(c)は、車両が最高速度で走行中の状態の速度パターンの概略図である。
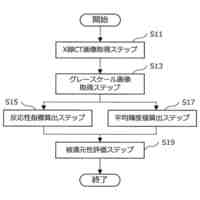
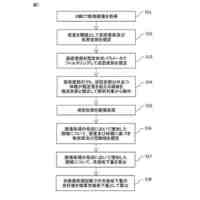
駐車支援装置により実行される駐車支援処理を示すフローチャートである。
(a)は、駐車支援処理を実行した車両のステアリング角度を示し、(b)は当該車両の軌跡を示す図である。
(a)は、他の最適化計算を行う場合の駐車支援処理を実行した車両のステアリング角度を示し、(b)は当該車両の軌跡を示す図である。
【発明を実施するための形態】
【0009】
以下、図面について本発明の一実施の形態を詳述する。以下の説明において、同一の構成要素には同一の符号を付し、重複する説明は省略する。
【0010】
(1)<本実施形態に係る駐車支援装置の構成>
図1に示すように、本実施形態に係る駐車支援装置3は、車両1に設けられており、車両1に備える車両制御装置2を制御し、運転者による操作なしに自動で車両1の前進、後進、操舵及び停車を行わせることによって、予め決められた駐車領域に車両1を自動走行により駐車させる装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本製鉄株式会社
鋼材
1か月前
日本製鉄株式会社
堤防
16日前
日本製鉄株式会社
鋼材
1か月前
日本製鉄株式会社
溶接継手
1か月前
日本製鉄株式会社
構造部品
1か月前
日本製鉄株式会社
接合継手
1か月前
日本製鉄株式会社
接合継手
1か月前
日本製鉄株式会社
クランク軸
2か月前
日本製鉄株式会社
シャフト部材
1か月前
日本製鉄株式会社
駐車支援装置
9日前
日本製鉄株式会社
経路算出装置
9日前
日本製鉄株式会社
駐車支援装置
9日前
日本製鉄株式会社
転炉吹錬方法
28日前
日本製鉄株式会社
表面処理鋼板
1か月前
日本製鉄株式会社
表面処理鋼板
1か月前
日本製鉄株式会社
連続鋳造方法
今日
日本製鉄株式会社
溶鋼の製造方法
2日前
日本製鉄株式会社
溶銑の脱珪方法
27日前
日本製鉄株式会社
多角形筒形構造
今日
日本製鉄株式会社
高炉の操業方法
今日
日本製鉄株式会社
表面処理金属板
19日前
日本製鉄株式会社
コイル搬送吊具
23日前
日本製鉄株式会社
スチールピストン
1か月前
日本製鉄株式会社
被還元性評価方法
2か月前
日本製鉄株式会社
焼結鉱の製造方法
16日前
日本製鉄株式会社
電磁ブレーキ装置
1か月前
日本製鉄株式会社
電気炉の精錬方法
1日前
日本製鉄株式会社
鉄源の溶解精錬方法
1か月前
日本製鉄株式会社
溶鋼の脱窒処理方法
2日前
日本製鉄株式会社
鋼管の水圧試験方法
2か月前
日本製鉄株式会社
鉄源の溶解精錬方法
1か月前
日本製鉄株式会社
低りん溶鉄製造方法
1か月前
日本製鉄株式会社
流体の電気加熱装置
1か月前
日本製鉄株式会社
流体の電気加熱装置
1か月前
日本製鉄株式会社
コークスの製造方法
1か月前
日本製鉄株式会社
溶接継手、及びタンク
21日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ