TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024081085
公報種別
公開特許公報(A)
公開日
2024-06-17
出願番号
2022194543
出願日
2022-12-05
発明の名称
経路算出装置
出願人
日本製鉄株式会社
代理人
弁理士法人ドライト国際特許事務所
主分類
B60W
30/06 20060101AFI20240610BHJP(車両一般)
要約
【課題】ステアリング角度の急激な変化を抑制した緩やかな移動経路を算出することができる経路算出装置を提供する。
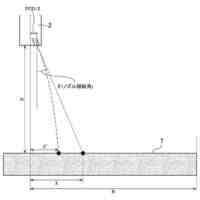
【解決手段】経路算出装置は、始点Sから中間点Hまでを結び、かつ複数の制御点T,U,E,Fで定義されるベジェ曲線を、始点Sから中間点Hまでの候補中間経路として算出した後、車両1の走行性能と駐車領域ER1とに関して予め定めた制約条件を、候補中間経路が満たすか否かを判定する。経路算出装置は、制約条件を満たした候補中間経路について、当該候補中間経路内に含む曲線の曲率最大値に関する評価値Jを算出し、得られた評価値Jに基づいて当該曲率最大値が最小となる候補中間経路を中間経路TP1として決定し、中間経路TP1と直線経路TP2とを、車両1の現在位置から駐車領域ER1までの車両1の移動経路TPとして算出する。
【選択図】図3
特許請求の範囲
【請求項1】
車両が現在地点から駐車領域まで移動する際の移動経路を算出する経路算出装置であって、
前記駐車領域の駐車目標地点を通り前記駐車領域の長手方向に延びた前記車両の進入方向を示す直線状の駐車基準線を特定し、前記車両に対して予め定めた前記車両の基準点を通り前記車両の全長方向に沿った直線状の車両中心線を特定する特定部と、
前記特定部から得られた結果に基づいて、前記車両の現在地点を始点とし、前記駐車領域内の駐車目標地点を終点として、前記始点から前記終点までの前記車両の移動経路を算出する算出部と、
を備え、
前記算出部は、
前記特定部で得られた結果に基づいて、前記駐車基準線に沿って直線状に前進又は後進するだけで前記車両が前記駐車領域に進入できる地点として中間点を決定し、前記始点から前記中間点までの間で前記車両が移動可能な領域の中から1つ以上の制御点を設定し、
前記制御点に基づいて定義され、前記始点から前記中間点までを結んだベジェ曲線を、前記始点から前記中間点までの候補中間経路として算出し、
前記候補中間経路が、前記駐車領域への前記車両の駐車に関して予め定めた制約条件を満たすか否かを判断し、
前記制約条件を満たした前記候補中間経路について、前記候補中間経路内に含む曲線の曲率最大値を含む評価値を算出し、前記評価値が最小となる前記候補中間経路を中間経路として決定し、
前記中間経路と、前記中間点から前記終点までを直線で結んだ直線経路とを、前記車両の現在位置から前記駐車領域までの前記車両の移動経路として算出する、経路算出装置。
続きを表示(約 680 文字)
【請求項2】
前記算出部は、
前記始点から前記終点に向かう側に、前記始点から離れた前記車両中心線上の点と、前記終点から前記始点に向かう側に、前記中間点から離れた前記駐車基準線上の点とを、それぞれ前記制御点として設定して前記ベジェ曲線を算出する、請求項1に記載の経路算出装置。
【請求項3】
前記算出部は、
前記始点から前記終点に向かう側に、前記始点から離れた前記車両中心線上の点を第1制御点とし、
前記始点から前記終点に向かう側に、前記始点から前記第1制御点までの距離だけ前記第1制御点から離れた前記車両中心線上の点を第2制御点とし、
前記終点から前記始点に向かう側に、前記中間点から離れた前記駐車基準線上の点を第4制御点とし、
前記終点から前記始点に向かう側に、前記中間点から前記第4制御点までの距離だけ前記第4制御点から離れた前記駐車基準線上の点を第3制御点として設定し、
前記第1制御点、前記第2制御点、前記第3制御点及び前記第4制御点で定義される前記ベジェ曲線を算出する、請求項1に記載の経路算出装置。
【請求項4】
前記制約条件は、
前記車両の走行性能に関する制約条件として、前記候補中間経路内にある曲線の曲率最大値が、前記車両の向きを変えるステアリング角度の限界範囲内であることを定め、
前記駐車領域に関する制約条件として、前記車両が前記駐車領域に進入する際に前記駐車領域の境界に衝突しない条件を定める、請求項1に記載の経路算出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、経路算出装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、運転者が運転操作を行わなくてもコンピュータによる制御により自動走行する自動運転車(以下、単に車両とも称する)の開発が進んでいる。このような車両では、車道からはみ出さずに目標経路に沿って自動的に走行する自動走行技術の他にも、予め決められた車庫(以下、駐車領域とも称する)に自動的に駐車させる自動駐車技術の開発も進んでいる(例えば、特許文献1,2参照)。
【0003】
例えば、特許文献1には、車両が移動する始点から終点までを複数の領域に分割し、領域ごとに車両の移動経路を4次以上の多項式で表し、さらに各領域の接続点で曲率や曲率の変化量等が連続となる制約や、操舵角及び走行速度の上限制約、移動範囲の制約の下、始点から駐車場内の終点までの移動距離が最小となる車両の移動経路を求める方法が開示されている。また、特許文献2には、前進走行で車両を駐車領域に駐車させる自動駐車技術が開示されており、最小回転半径以上の2つの円弧を接続したS字カーブの移動経路を生成することが開示されている。
【先行技術文献】
【特許文献】
【0004】
国際公開第2020/217315号
特開2021-194962号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1では、運転効率を重視し、車両の移動距離を最小にした移動経路を算出しており、車両の向きを変えるステアリング角度を急激に変化させるような移動経路になるおそれもある。また、特許文献2では、2つの円弧を組み合わせた移動経路であり、2つの円弧の接点で曲率が不連続となるため、2つの円弧の接点でステアリング角度を急激に変化させる必要がある。このように、車両のステアリング角度を急激に変化させる必要がある移動経路が算出されると、例えば、全長の長い車両を横幅が狭い駐車領域に正確に駐車させる必要がある場合、車両の制動性能や旋回性能によってはステアリング角度を急激に変化させても車両が移動経路から外れてしまうおそれもあり、車両を移動経路に沿って正確に移動し難い可能性もある。そのため、なるべくステアリング角度の急激な変化を抑制した緩やかな曲線でなる移動経路を算出することが望まれる。
【0006】
そこで、本発明は、上記のような問題に鑑みてなされたものであり、ステアリング角度の急激な変化を抑制した緩やかな移動経路を算出することができる経路算出装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の経路算出装置は、車両が現在地点から駐車領域まで移動する際の移動経路を算出する経路算出装置であって、前記駐車領域の駐車目標地点を通り前記駐車領域の長手方向に延びた前記車両の進入方向を示す直線状の駐車基準線を特定し、前記車両に対して予め定めた前記車両の基準点を通り前記車両の全長方向に沿った直線状の車両中心線を特定する特定部と、前記特定部から得られた結果に基づいて、前記車両の現在地点を始点とし、前記駐車領域内の駐車目標地点を終点として、前記始点から前記終点までの前記車両の移動経路を算出する算出部と、を備え、前記算出部は、前記特定部で得られた結果に基づいて、前記駐車基準線に沿って直線状に前進又は後進するだけで前記車両が前記駐車領域に進入できる地点として中間点を決定し、前記始点から前記中間点までの間で前記車両が移動可能な領域の中から1つ以上の制御点を設定し、前記制御点に基づいて定義され、前記始点から前記中間点までを結んだベジェ曲線を、前記始点から前記中間点までの候補中間経路として算出し、前記候補中間経路が、前記駐車領域への前記車両の駐車に関して予め定めた制約条件を満たすか否かを判断し、前記制約条件を満たした前記候補中間経路について、前記候補中間経路内に含む曲線の曲率最大値を含む評価値を算出し、前記評価値が最小となる前記候補中間経路を中間経路として決定し、前記中間経路と、前記中間点から前記終点までを直線で結んだ直線経路とを、前記車両の現在位置から前記駐車領域までの前記車両の移動経路として算出する。
【発明の効果】
【0008】
本発明によれば、始点から中間点を経由して終点まで移動する車両の移動経路として、車両のステアリング角度の急激な変化を抑制した緩やかな移動経路を算出することができる。
【図面の簡単な説明】
【0009】
本実施形態に係る経路算出装置を有する車両の回路構成を示すブロック図である。
(a)は、移動経路を算出する前の車両の初期状態を示す概略図であり、(b)は、算出された移動経路を示す概略図であり、(c)は、移動経路に沿って車両が駐車領域まで移動して駐車領域に駐車した駐車完了後の状態を示す概略図である。
経路算出処理を説明するための概略図である。
経路算出処理手順を示すフローチャートである。
(a)は、シミュレーションにより求めた移動経路を示す概略図であり、(b)は、(a)に示した移動経路に沿って車両を移動させる際のステアリング角度を示すグラフである。
【発明を実施するための形態】
【0010】
以下図面について本発明の一実施の形態を詳述する。以下の説明において、同一の構成要素には同一の符号を付し、重複する説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本製鉄株式会社
鋼材
15日前
日本製鉄株式会社
ボルト
19日前
日本製鉄株式会社
鋼矢板
29日前
日本製鉄株式会社
チタン材
1日前
日本製鉄株式会社
構造部材
8日前
日本製鉄株式会社
クランク軸
9日前
日本製鉄株式会社
耐火構造物
9日前
日本製鉄株式会社
耐火構造物
9日前
日本製鉄株式会社
耐火構造物
9日前
日本製鉄株式会社
鉄道架線柱
15日前
日本製鉄株式会社
油井用金属管
15日前
日本製鉄株式会社
管用ねじ継手
16日前
日本製鉄株式会社
連続鋳造装置
23日前
日本製鉄株式会社
連続鋳造方法
25日前
日本製鉄株式会社
連続鋳造装置
25日前
日本製鉄株式会社
転炉精錬方法
25日前
日本製鉄株式会社
溶銑の製造方法
9日前
日本製鉄株式会社
低P鋼の溶製方法
15日前
日本製鉄株式会社
鋼の連続鋳造方法
15日前
日本製鉄株式会社
モールドパウダー
29日前
日本製鉄株式会社
金属材の冷却方法
15日前
日本製鉄株式会社
鋼の連続鋳造方法
25日前
日本製鉄株式会社
焼結装置の運転方法
8日前
日本製鉄株式会社
連続鋳造用浸漬ノズル
16日前
日本製鉄株式会社
光触媒及びその製造方法
25日前
日本製鉄株式会社
高温流体の配管移送装置
9日前
日本製鉄株式会社
鋼板及び鋼板の製造方法
25日前
日本製鉄株式会社
スマットを除去する方法
4日前
日本製鉄株式会社
高力ボルト摩擦接合構造
4日前
日本製鉄株式会社
Cu含有鋼鋳片の製造方法
15日前
日本製鉄株式会社
空気ばねの高さの計算方法
29日前
日本製鉄株式会社
薄鋼板および連続鋳造鋳片
15日前
日本製鉄株式会社
梁接合構造及び梁接合方法
9日前
日本製鉄株式会社
梁接合構造及び梁接合方法
9日前
日本製鉄株式会社
傾斜管内壁安全幕設置方法
8日前
日本製鉄株式会社
RH真空脱ガス設備の下部槽
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ