TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024054076
公報種別
公開特許公報(A)
公開日
2024-04-16
出願番号
2023143137
出願日
2023-09-04
発明の名称
枠体施工ロボット
出願人
鹿島建設株式会社
,
株式会社テムザック
代理人
弁理士法人後藤特許事務所
主分類
E04G
21/16 20060101AFI20240409BHJP(建築物)
要約
【課題】高所作業である枠体の設置作業を枠体施工ロボットによって行う。
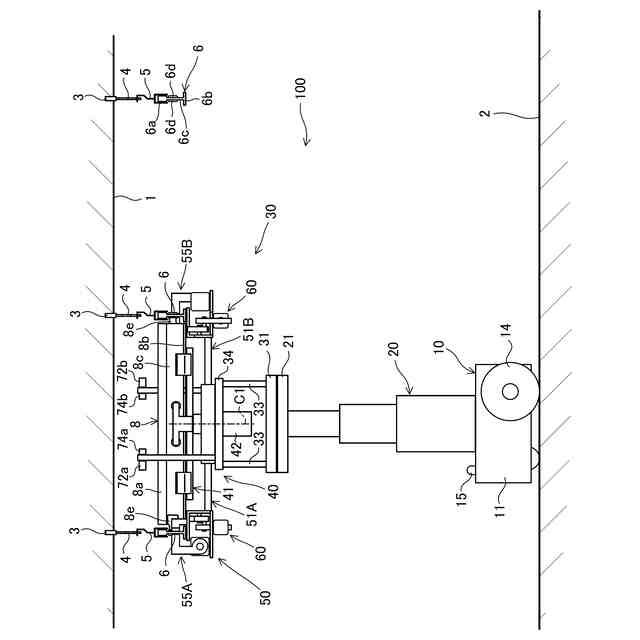
【解決手段】一対のメインバー6にサブバー8を取り付ける枠体施工ロボット100は、台車部10と、昇降部20と、一対のメインバー6にサブバー8を取り付ける作業を行う取付作業部30と、一対のメインバー6の状態を検知可能な既設バーセンサ72a,72bと、取付作業部30の作動を制御する制御部70と、を備え、取付作業部30は、サブバー8の位置を調整可能な第1位置調整部40と、一対のメインバー6間の間隔を所定の大きさとすることが可能な第2位置調整部50と、を有し、制御部70は、間隔が所定の大きさである一対のメインバー6の差込口6dへ差込部8eを差し込むことが可能となるように、第1位置調整部40を制御して、サブバー8の位置を調整する。
【選択図】図15
特許請求の範囲
【請求項1】
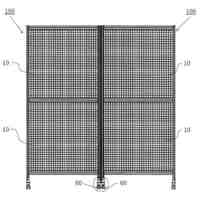
天井スラブにより支持された一対の既設バーにクロスバーを取り付ける枠体施工ロボットであって、
床面を移動可能な台車部と、
前記台車部上に載置される昇降部と、
前記昇降部上に載置され、一対の前記既設バーに前記クロスバーを取り付ける作業を行う取付作業部と、
一対の前記既設バーの状態を検知可能な既設バー検知部と、
前記既設バー検知部により検出された一対の前記既設バーの状態に基づいて前記取付作業部の作動を制御する制御部と、を備え、
前記取付作業部は、
前記クロスバーを保持するとともに、前記クロスバーの両端部にそれぞれ設けられた差込部が一対の前記既設バーにそれぞれ設けられた差込口に近付くように前記クロスバーの位置を調整可能な第1位置調整部と、
一対の前記既設バー間の間隔を所定の大きさとすることが可能な第2位置調整部と、を有し、
前記制御部は、間隔が所定の大きさである一対の前記既設バーの前記差込口へ前記差込部を差し込むことが可能となるように、前記第1位置調整部を制御して、前記クロスバーの位置を調整する、
枠体施工ロボット。
続きを表示(約 1,000 文字)
【請求項2】
一対の前記既設バーに対して略直交するように設けられた基準バーの状態を検知可能な基準バー検知部をさらに備え、
前記第2位置調整部は、一対の前記既設バーを把持可能な一対の把持部を有し、
前記制御部は、一対の前記把持部により一対の前記既設バーを把持させる前に、前記基準バー検知部により検知された前記基準バーの長手方向に対して、一対の前記把持部による一対の前記既設バーの把持方向が直交するように、前記取付作業部の位置を調整する、
請求項1に記載の枠体施工ロボット。
【請求項3】
前記第1位置調整部は、前記差込部を一対の前記既設バーに対して押し付け可能な押付部を有する、
請求項1または2に記載の枠体施工ロボット。
【請求項4】
前記第1位置調整部は、
前記クロスバーの一端側を保持する第1保持部と、
一対の前記既設バーと平行な方向及び直交する方向に前記第1保持部を移動可能な第1移動部と、
前記クロスバーの他端側を保持する第2保持部と、
一対の前記既設バーと平行な方向及び直交する方向に前記第2保持部を移動可能な第2移動部と、を有し、
前記制御部は、前記第1移動部及び前記第2移動部を制御して、前記クロスバーの両端部にそれぞれ設けられた前記差込部を前記差込口に向けて移動させる、
請求項1または2に記載の枠体施工ロボット。
【請求項5】
一対の前記既設バーにそれぞれ設けられた前記差込口の位置を検知する差込口検知部をさらに備え、
前記制御部は、前記差込口検知部により検知された前記差込口の位置に基づいて、前記第1位置調整部を制御して、前記差込口へ前記差込部を差し込むことが可能となるように前記クロスバーの位置を調整する、
請求項1または2に記載の枠体施工ロボット。
【請求項6】
前記取付作業部は、前記クロスバーの端部を押圧することによって前記差込部を前記差込口に押し込む押込部をさらに有し、
前記制御部は、前記第1位置調整部を制御し、前記差込口に向けて前記差込部を移動させた後、前記押込部を制御し、前記差込部を前記差込口へと押し込む、
請求項1または2に記載の枠体施工ロボット。
【請求項7】
前記昇降部と前記取付作業部との間に設けられ、前記取付作業部の水平方向位置を調整可能な水平変位機構をさらに備える、
請求項1または2に記載の枠体施工ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、枠体施工ロボットに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
特許文献1には、天井部分に設けられた枠体に対して天井ボードを取り付ける施工ロボットが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-123645号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された施工ロボットは、天井部分に設けられた枠体に天井ボードを取り付けるという高所作業を行うロボットではあるものの、枠体を設置する機能を備えたものではない。つまり、天井部分へ枠体を設置するという高所作業については作業員が予め行わなければならず、作業員の作業負担を十分に軽減するには至っていない。
【0005】
本発明は、高所作業である枠体の設置作業を行うことが可能な枠体施工ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、天井スラブにより支持された一対の既設バーにクロスバーを取り付ける枠体施工ロボットであって、床面を移動可能な台車部と、台車部上に載置される昇降部と、昇降部上に載置され、一対の既設バーにクロスバーを取り付ける作業を行う取付作業部と、一対の既設バーの状態を検知可能な既設バー検知部と、既設バー検知部により検出された一対の既設バーの状態に基づいて取付作業部の作動を制御する制御部と、を備え、取付作業部は、クロスバーを保持するとともに、クロスバーの両端部にそれぞれ設けられた差込部が一対の既設バーにそれぞれ設けられた差込口に近付くようにクロスバーの位置を調整可能な第1位置調整部と、一対の既設バー間の間隔を所定の大きさとすることが可能な第2位置調整部と、を有し、制御部は、間隔が所定の大きさである一対の既設バーの差込口へ差込部を差し込むことが可能となるように、第1位置調整部を制御して、クロスバーの位置を調整する。
【発明の効果】
【0007】
本発明によれば、枠体施工ロボットによって、高所作業である枠体の設置作業を行うことができる。
【図面の簡単な説明】
【0008】
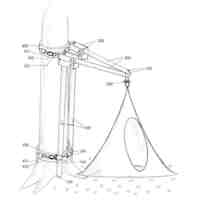
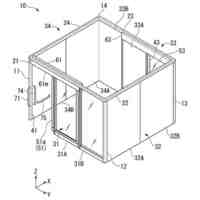
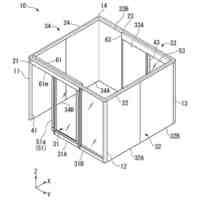
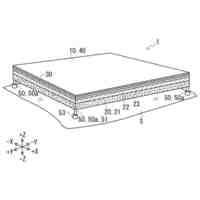
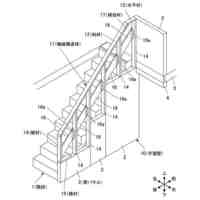
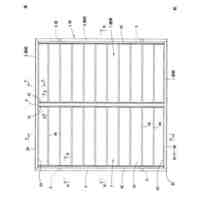
本発明の第1実施形態に係る枠体施工ロボットによって行われる枠体設置作業のイメージを示したイメージ図である。
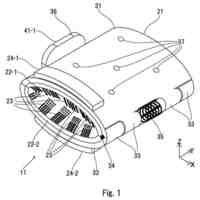
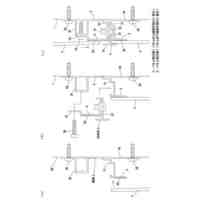
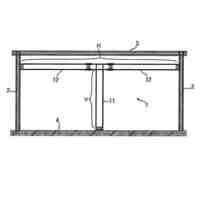
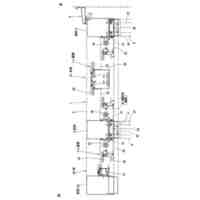
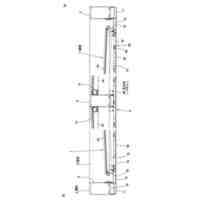
枠体施工ロボットの正面を部分的に拡大して示した部分正面図である。
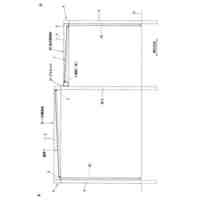
図2に対応する枠体施工ロボットの平面図である。
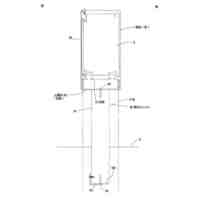
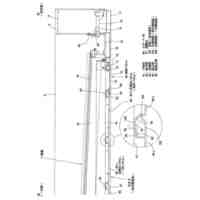
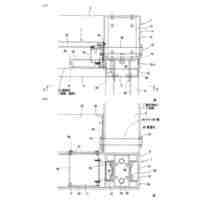
図2のA-A線に沿う断面を示した断面図である。
図2のB-B線に沿う断面を示した断面図である。
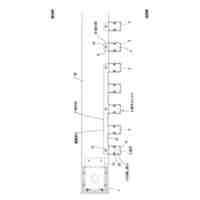
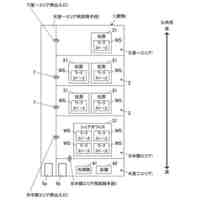
枠体施工ロボットを含む制御システム全体の構成を示すブロック図である。
枠体施工ロボットが行う作業の手順を示したフローチャートである。
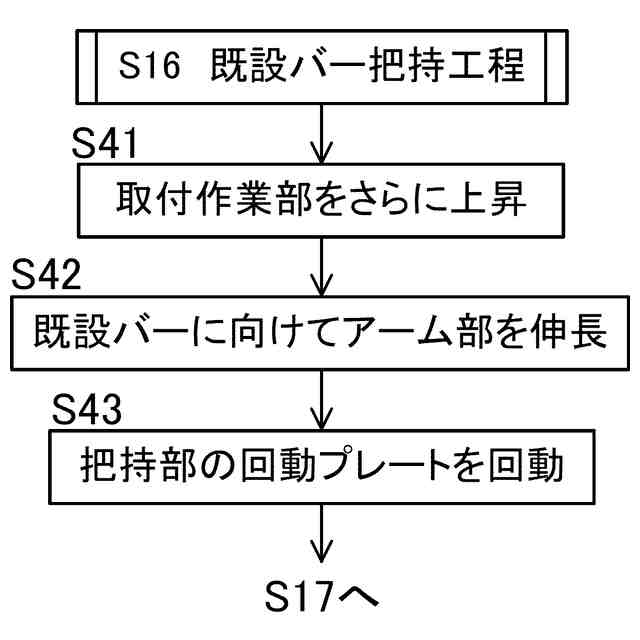
図7のフローチャートの一部の作業の手順を示したフローチャートである。
図7のフローチャートの一部の作業の手順を示したフローチャートである。
図7のフローチャートの一部の作業の手順を示したフローチャートである。
図7のフローチャートの一部の作業の手順を示したフローチャートである。
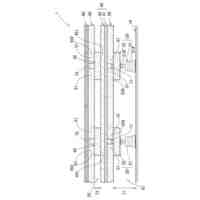
枠体施工ロボットによって行われる既設バーの検知について説明するための概略図である。
図12の矢印Cで示される方向から見た枠体施工ロボット及び既設バーを示した図である。
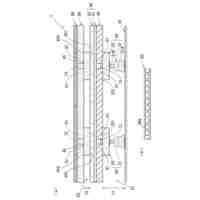
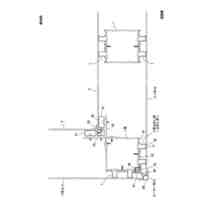
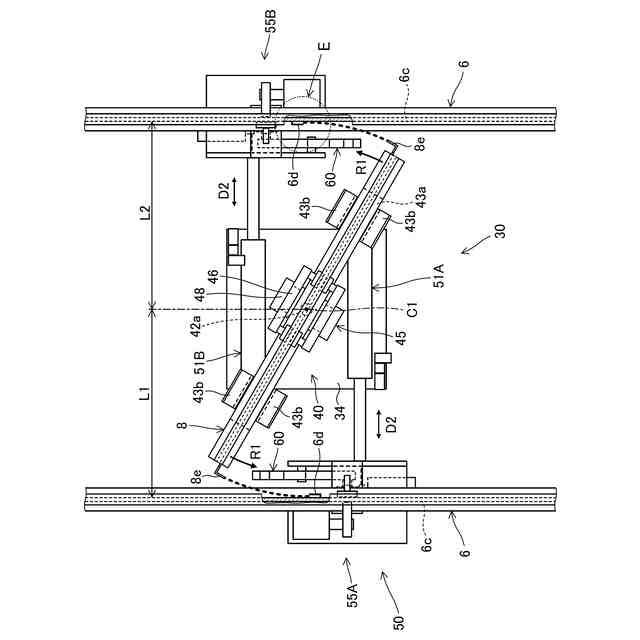
枠体施工ロボットによって行われるクロスバーの取り付けについて説明するための概略図である。
図14の矢印Dで示される方向から見た枠体施工ロボット及び既設バーを示した図である。
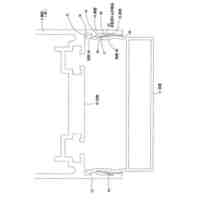
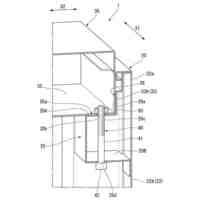
図15の矢印Eで示される部分を拡大して示した拡大図である。
本発明の第2実施形態に係る枠体施工ロボットによって行われる枠体設置作業のイメージを示したイメージ図である。
枠体施工ロボットの正面を部分的に拡大して示した部分正面図である。
図18に対応する枠体施工ロボットの平面図である。
図18の矢印Fで示される方向から見た保持部を示した図である。
枠体施工ロボットの正面に設けられた補充機構を示した図である。
枠体施工ロボットを含む制御システム全体の構成を示すブロック図である。
枠体施工ロボットが行う作業の手順を示したフローチャートである。
図23のフローチャートの一部の作業の手順を示したフローチャートである。
図23のフローチャートの一部の作業の手順を示したフローチャートである。
図23のフローチャートの一部の作業の手順を示したフローチャートである。
図23のフローチャートの一部の作業の手順を示したフローチャートである。
枠体施工ロボットを上方から見た図であり、既設バーの検知について説明するための概略図である。
図28のG-G線に沿う断面を示した断面図であり、差込口検知部の作動について説明するための概略図である。
図29のH-H線に沿う断面を示した断面図である。
図29のH-H線に沿う断面に相当する断面を示した断面図であり、押付部の作動について説明するための概略図である。
図28のJ-J線に沿う断面を示した断面図であり、押込部の作動について説明するための概略図である。
図32のK-K線に沿う断面を示した断面図である。
図21の矢印Lで示される方向から見た補充機構の図であり、補充機構の作動を工程順に説明するための図である。
補充機構の作動を工程順に説明するための図であり、図34に続く工程を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、本発明の実施形態に係る枠体施工ロボットについて説明する。
【0010】
<第1実施形態>
本発明の第1実施形態に係る枠体施工ロボット100(以下、「施工ロボット100」という。)は、外部からの操作を必要としない自律型ロボットであり、図1に示すように、天井スラブ1により支持された一対のメインバー6(既設バー)に対してサブバー8(クロスバー)を取り付ける作業を行うものである。図1には、施工ロボット100によって行われる作業を一対のメインバー6の長手方向に沿った方向から見た状態が示されている。なお、図1は、施工ロボット100と各バー部材6,8との関係性をわかりやすく誇張して示したイメージ図であり、実際の大きさや比率とは異なる部分がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
耐震装置
2日前
個人
簡易車庫
1か月前
個人
地下食糧生産システム
23日前
個人
スマート型枠組立工法
23日前
積水樹脂株式会社
ガード装置
28日前
曙建設株式会社
留め具
1か月前
合同会社杢草舎
ツリーテント
22日前
三協立山株式会社
構造体
7日前
淡路技建株式会社
床構造
1か月前
淡路技建株式会社
床構造
1か月前
株式会社ホーシン
養生蓋
2日前
三協立山株式会社
構造体
28日前
三協立山株式会社
構造体
28日前
三協立山株式会社
構造体
28日前
三協立山株式会社
構造体
28日前
三協立山株式会社
構造体
7日前
三協立山株式会社
構造体
28日前
株式会社オカムラ
ブース
21日前
株式会社オカムラ
ブース
14日前
株式会社オカムラ
ブース
14日前
株式会社オカムラ
ブース
21日前
株式会社大林組
建物
29日前
株式会社竹中工務店
二重床
7日前
ミサワホーム株式会社
建物
1か月前
鹿島建設株式会社
補強構造
1か月前
株式会社エフコンサルタント
面材
1か月前
ミサワホーム株式会社
建物
28日前
ミサワホーム株式会社
手摺壁
1か月前
三協立山株式会社
簡易構造物
1か月前
三協立山株式会社
簡易構造物
1か月前
三協立山株式会社
天井構造体
28日前
三協立山株式会社
簡易構造物
28日前
三協立山株式会社
簡易構造物
28日前
三協立山株式会社
簡易構造物
1か月前
三協立山株式会社
簡易構造物
28日前
株式会社オカムラ
ブース装置
21日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ