TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024045937
公報種別
公開特許公報(A)
公開日
2024-04-03
出願番号
2022151035
出願日
2022-09-22
発明の名称
磁気ディスク装置及びヘッド制御方法
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人スズエ国際特許事務所
主分類
G11B
5/596 20060101AFI20240327BHJP(情報記憶)
要約
【課題】フィードフォワード制御によりヘッドの振動を抑制する磁気ディスク装置及びヘッド制御方法を提供する。
【解決手段】本実施形態に係る磁気ディスク装置は、VCM制御値とヘッドの現在位置の情報であるヘッド位置情報とが入力値として入力され、マイクロアクチュエータへのMA制御補正値を出力値として出力するフィードフォワード制御部を備え、前記フィードフォワード制御部は、前記入力値と前記出力値の関係を示す伝達関数モデルを含むプラントモデル処理部を備え、さらに前記プラントモデル処理部は、複数のサブモデル処理部を含み、各前記サブモデル処理部は、それぞれに与えられる伝達関数モデルに基づいて、入力される前記入力値に対する出力値であるサブモデル出力値を生成し、前記フィードフォワード制御部は、複数の前記サブモデル出力値に基づいて前記出力値を生成する。
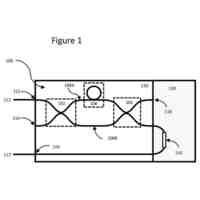
【選択図】図1
特許請求の範囲
【請求項1】
磁気ディスクからデータを読み書きするヘッドと、
前記ヘッドを支えるアームと、
前記ヘッドをシーク制御するために前記アームを制御するボイスコイルモータ(VCM)と、
前記ヘッドの位置を調整するマイクロアクチュエータと、
前記VCMへ入力されるVCM制御値と前記マイクロアクチュエータへ入力されるMA制御値とを生成するサーボ制御部と、
前記ヘッドの現在位置の情報であるヘッド位置情報と前記VCM制御値とが入力値として入力され、前記マイクロアクチュエータへのMA制御補正値を出力値として出力するフィードフォワード制御部を備え、
前記フィードフォワード制御部は、前記入力値と前記出力値の関係を示す伝達関数モデルを含むプラントモデル処理部を備え、
さらに前記プラントモデル処理部は、複数のサブモデル処理部を含み、
各前記サブモデル処理部は、それぞれに与えられる伝達関数モデルに基づいて、入力される前記入力値に対する出力値であるサブモデル出力値を生成し、
前記フィードフォワード制御部は、複数の前記サブモデル出力値に基づいて前記出力値を生成する磁気ディスク装置。
続きを表示(約 1,300 文字)
【請求項2】
前記複数のサブモデル処理部のうち少なくとも1つのサブモデル処理部は、与えられた伝達関数モデルに更新可能な適応パラメータを含み、
前記フィードフォワード制御部は、前記VCM制御値と前記ヘッド位置情報とに基づいて前記適応パラメータを更新する請求項1に記載の磁気ディスク装置。
【請求項3】
前記フィードフォワード制御部は、
第1サブモデル出力値を出力するとともに前記第1サブモデル出力値と前記ヘッド位置情報とから第1誤差値を生成する第1サブモデル処理部と、
第2サブモデル出力値を出力するとともに前記第2サブモデル出力値と前記第1誤差値とから第2誤差値を生成する第2サブモデル処理部とを備え、
前記第2サブモデル出力値に基づいて前記出力値を生成し、
前記第1サブモデル処理部及び前期第2サブモデル処理部のいずれかは、生成した誤差値に基づいて前記適応パラメータを更新する請求項2に記載の磁気ディスク装置。
【請求項4】
前記フィードフォワード制御部は、
さらに、第3サブモデル出力値を出力するとともに前記第3サブモデル出力値と他の1つのサブモデル処理部から受信した誤差値とから第3誤差値を生成する複数の第3サブモデル処理部とを備え、
前記サブモデル処理部の少なくとも1つは、生成した誤差値に基づいて前記適応パラメータを更新する請求項3に記載の磁気ディスク装置。
【請求項5】
前記複数のサブモデル処理部は、前記ヘッドの位置に影響する振動モードに基づいて決定する伝達関数モデルを含む請求項1乃至請求項4のいずれか1項に記載の磁気ディスク装置。
【請求項6】
前記振動モードは前記VCMの剛体モードを含む請求項5に記載の磁気ディスク装置。
【請求項7】
前記振動モードは前記VCMの主共振モードを含む請求項6に記載の磁気ディスク装置。
【請求項8】
前記複数のサブモデル処理部は、ARXモデルで定義する伝達関数モデルを含む請求項5に記載の磁気ディスク装置。
【請求項9】
複数の前記ヘッドと、
複数の前記ヘッドを制御する前記VCMと、複数の前記アームと、複数の前記マイクロアクチュエータと、複数の前記フィードフォワード制御部と、複数のサーボ制御部と、第1データベースが格納される記憶部とを備え、
前記第1データベースは、
複数の前記ヘッドを識別する情報であるヘッド識別情報と、前記ヘッド識別情報に紐づけられたサブモデルに適用する伝達関数モデルが格納され、
前記複数のフィードフォワード制御部は、前記第1データベースに基づいて前記サブモデル処理部の伝達関数モデルを決定する請求項8に記載の磁気ディスク装置。
【請求項10】
前記ヘッド識別情報は、前記ヘッドが取り付けられる各前記アームの取付位置とヘッドの上下位置との組み合わせである請求項9に記載の磁気ディスク装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、フィードフォワード制御を適用した磁気ディスク装置及びヘッド制御方法に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
ハードディスクドライブ(HDD)などの磁気ディスク装置では、シーク動作を実行する際、シーク電流によってボイスコイルモータ(VCM)が加速・減速されるが同時にVCMその他の共振モードが刺激され、セトリング時の残留振動となって現れる。この残留振動に対して、シーク電流からフィードフォワード制御によって残留振動を抑制しようとした場合、フィードフォワード制御器にはVCMへの電流入力からヘッド変位までの伝達関数の要素が含まれる。
【先行技術文献】
【特許文献】
【0003】
米国特許第11189310B1号明細書
米国特許第11205450B2号明細書
【非特許文献】
【0004】
Adaptive Cancelation of Self-Induced Vibration, T. Semba, M. T. White, F.-Y. Huang, IEEE Trans. On Magnetics, Vol.47, No.7, July 2011
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、HDDのVCMで残留振動に表れやすいモードの一例としてコイルねじれモードがある。このモードは、減衰係数が小さく振動が持続するために、アクチュエータがシーク制御で大きく動いた後のセトリング時の残留振動には表れてくるが、VCMへの電流入力からヘッド位置までの伝達関数を測定した場合には剛体モードおよび主共振モードに埋もれてしまって明確には見えづらい。
【0006】
本発明の実施形態が解決しようとする課題は、フィードフォワード制御によりヘッドの振動を抑制する磁気ディスク装置及びヘッド制御方法を提供することである。
【課題を解決するための手段】
【0007】
本実施形態に係る磁気ディスク装置は、磁気ディスクからデータを読み書きするヘッドと、前記ヘッドを支えるアームと、前記ヘッドをシーク制御するために前記アームを制御するボイスコイルモータ(VCM)と、前記ヘッドの位置を微調整するマイクロアクチュエータと、前記VCMへ入力するVCM制御値と前記マイクロアクチュエータへ入力するMA制御値とを生成するサーボ制御部と、前記VCM制御値と前記ヘッドの現在位置の情報であるヘッド位置情報とが入力値として入力され、マイクロアクチュエータへのMA制御補正値を出力値として出力するフィードフォワード制御部を備え、前記フィードフォワード制御部は、前記入力値と前記出力値の関係を示す伝達関数モデルを含むプラントモデル処理部を備え、さらに前記プラントモデル処理部は、複数のサブモデル処理部を含み、各前記サブモデル処理部は、それぞれに与えられる伝達関数モデルに基づいて、入力される前記入力値に対する出力値であるサブモデル出力値を生成し、前記フィードフォワード制御部は、複数の前記サブモデル出力値に基づいて前記出力値を生成する。
【図面の簡単な説明】
【0008】
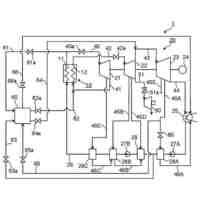
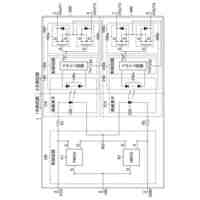
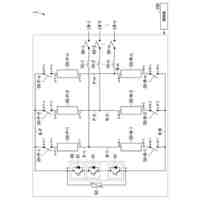
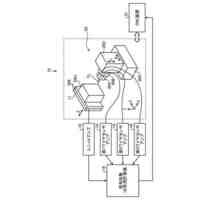
図1は、第1の実施形態に係る磁気ディスク装置の構成図である。
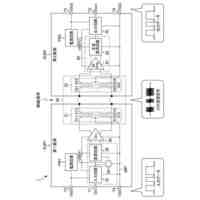
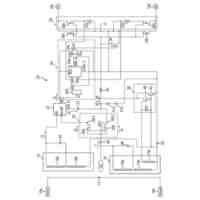
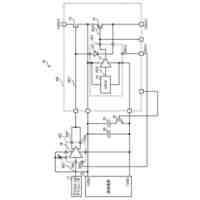
図2は、第1の実施形態に係る磁気ディスク装置におけるサーボ制御部及び関連部位のブロック線図の例である。
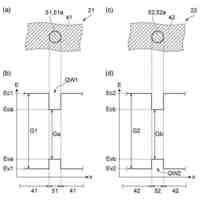
図3Aは、第1の実施形態に係る磁気ディスク装置におけるVCMへの入力電流に対するヘッド変位の伝達関数の例である。
図3Bは、第1の実施形態に係る磁気ディスク装置における各サブモデルのシーク電流に対する時間応答の例である。
図4は、第1の実施形態に係る磁気ディスク装置のサーボ制御部及び関連部位の処理動作手順を説明する図である。
図5は、第2の実施形態に係る磁気ディスク装置におけるサーボ制御部及び関連部位のブロック線図の例である。
図6は、第2の実施形態に係る磁気ディスク装置におけるサーボ制御部及び関連部位の処理動作手順を説明する図である。
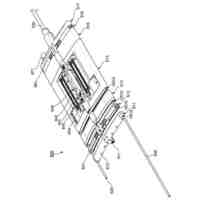
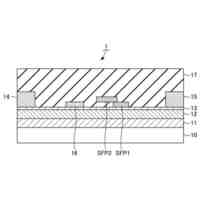
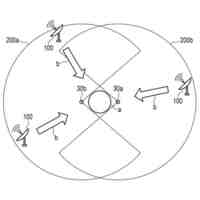
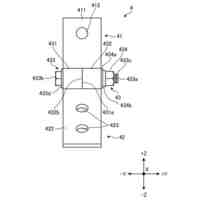
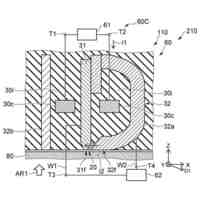
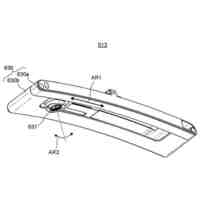
図7は、第3の実施形態に係る磁気ディスク装置におけるアクチュエータ及び関連部位のイメージ例である。
図8は、第3の実施形態に係る磁気ディスク装置におけるサーボ制御部及び関連部位のブロック線図の例である。
図9は、第3の実施形態に係る磁気ディスク装置において各ヘッドに対するフィードフォワード制御部に適用するサブモデルが格納されるデータベースの例である。
【発明を実施するための形態】
【0009】
以下、実施の形態について図面を参照して説明する。なお、図面は、一例であって、発明の範囲を限定するものではない。
【0010】
(第1の実施形態)
本実施形態の磁気ディスク装置は、マルチアクチュエータを制御するフィードフォワード制御のプラントモデルを剛体モード、主共振モード、その他の振動モードなど複数の振動モードに分解して、それぞれの振動モードに対する伝達関数モデルを定義し、伝達関数モデルのパラメータを同定・学習する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
発電設備
1か月前
株式会社東芝
電源回路
1か月前
株式会社東芝
通信装置
13日前
株式会社東芝
検査装置
1か月前
株式会社東芝
半導体装置
15日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
レーダ装置
1か月前
株式会社東芝
半導体装置
14日前
株式会社東芝
搬送ローラ
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体スイッチ
1か月前
株式会社東芝
加速器システム
7日前
株式会社東芝
紫外線照射装置
1か月前
株式会社東芝
平面アンテナ装置
1か月前
株式会社東芝
直流電流遮断装置
1か月前
株式会社東芝
配電盤用端子導体
26日前
株式会社東芝
突入電流抑制回路
1か月前
株式会社東芝
モールド真空バルブ
14日前
株式会社東芝
プラズマ水処理装置
1か月前
株式会社東芝
アレイアンテナ装置
1か月前
株式会社東芝
投入装置及びシステム
1か月前
株式会社東芝
回転子および回転電機
21日前
株式会社東芝
フォトニック集積回路
26日前
株式会社東芝
フォトニックアセンブリ
13日前
株式会社東芝
電気車及び鉄道システム
7日前
株式会社東芝
収集装置およびプログラム
7日前
株式会社東芝
窒化物半導体及び半導体装置
8日前
株式会社東芝
窒化物半導体及び半導体装置
8日前
株式会社東芝
モータ制御回路及び測距装置
15日前
株式会社東芝
エンジニアリングツール装置
18日前
株式会社東芝
半導体構造体及び半導体装置
1か月前
株式会社東芝
磁気ヘッド及び磁気記録装置
21日前
株式会社東芝
センサシステム及び工作機械
1か月前
株式会社東芝
ブッシング挿入時の防塵工法
5日前
株式会社東芝
検査装置および検査システム
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ