TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025159686
公報種別
公開特許公報(A)
公開日
2025-10-21
出願番号
2024110791
出願日
2024-07-10
発明の名称
流体制御装置、流体制御バルブの制御方法、流体制御方法、及び、流体制御プログラム
出願人
株式会社堀場エステック
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05D
7/06 20060101AFI20251014BHJP(制御;調整)
要約
【課題】全閉時における弁座面又は弁体の損傷を低減する。
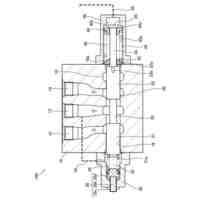
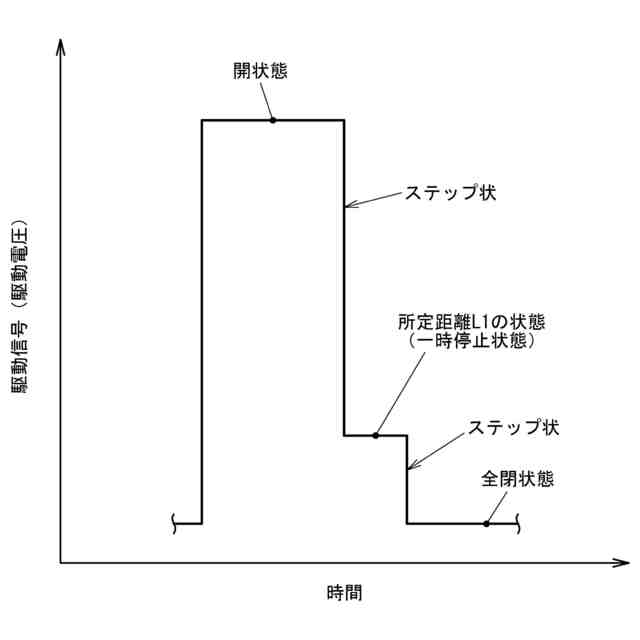
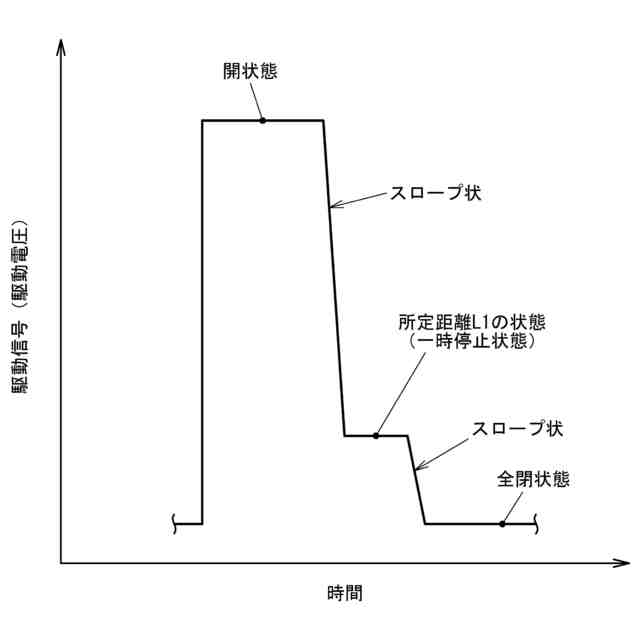
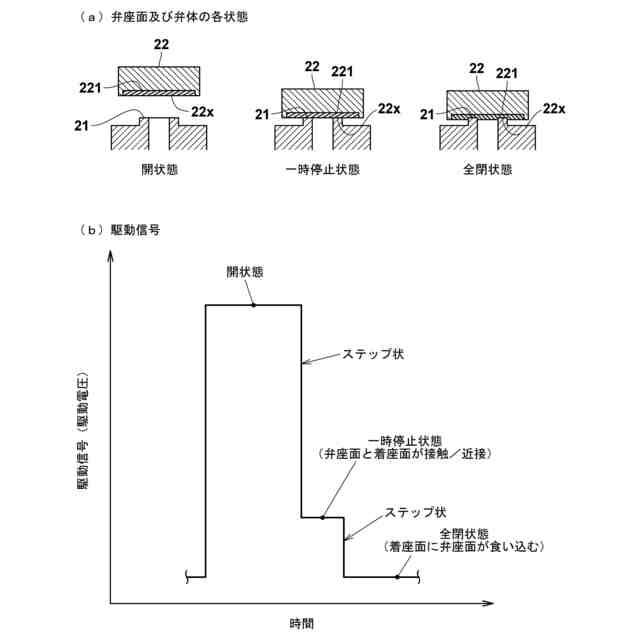
【解決手段】駆動信号の値に応じて弁座面21及び弁体22の距離が変化する流体制御バルブ2と、駆動信号を出力して流体制御バルブ2を制御する制御機構CTLとを備え、制御機構CTLは、流体制御バルブ2を全閉させる場合に、全閉状態となる前に一時停止させるための駆動信号を流体制御バルブ2に出力し、その後、全閉状態とするための駆動信号を流体制御バルブ2に出力する。
【選択図】図3
特許請求の範囲
【請求項1】
駆動信号に応じて弁座面及び弁体の距離が変化する流体制御バルブと、
前記駆動信号を出力して前記流体制御バルブを制御する制御機構とを備え、
前記制御機構は、前記流体制御バルブを全閉させる場合に、全閉状態となる前に一時停止させるための駆動信号を前記流体制御バルブに出力し、その後、全閉状態とするための駆動信号を前記流体制御バルブに出力する、流体制御装置。
続きを表示(約 1,100 文字)
【請求項2】
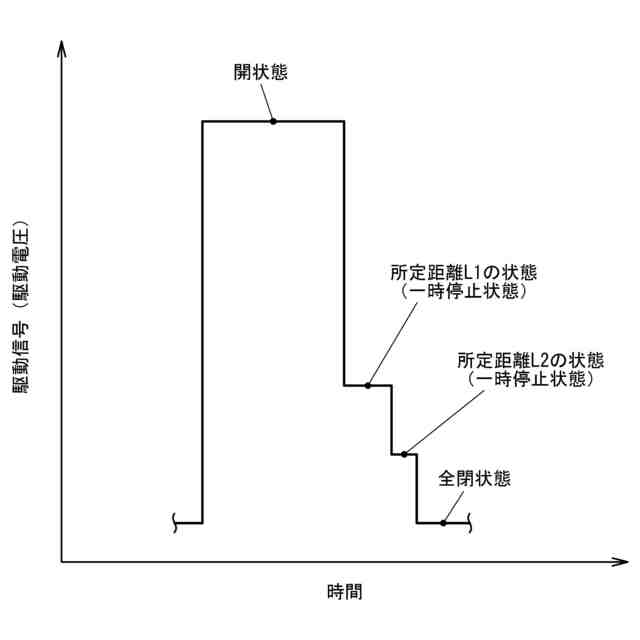
前記制御機構は、前記流体制御バルブを全閉させる場合に、全閉状態となる前に前記弁座面と前記弁体との間を所定距離で一時停止させるための駆動信号を前記流体制御バルブに出力し、その後、全閉状態とするための駆動信号を前記流体制御バルブに出力する、請求項1に記載の流体制御装置。
【請求項3】
前記所定距離は、前記流体制御バルブを前記所定距離で一時停止した際に生じるオーバーシュートによって前記弁体が前記弁座面に接触しない距離である、請求項2に記載の流体制御装置。
【請求項4】
前記制御機構は、前記所定距離となった状態で、過渡応答における振動が所定値以下に収束した後に、全閉状態とするための駆動信号を前記流体制御バルブに出力する、請求項3に記載の流体制御装置。
【請求項5】
前記所定距離は、全開状態から全閉状態までのストローク量の30%以下の距離である、請求項2乃至4の何れか一項に記載の流体制御装置。
【請求項6】
前記弁体は、前記弁座面に着座する着座面が樹脂層により形成されたものであり、
前記制御機構は、前記流体制御バルブを全閉させる場合に、全閉状態となる前に前記弁座面と前記着座面とが接触又は近接した状態で一時停止させるための駆動信号を前記流体制御バルブに出力し、その後、前記着座面に前記弁座面が食い込んだ全閉状態とするための駆動信号を前記流体制御バルブに出力する、請求項1に記載の流体制御装置。
【請求項7】
前記制御機構は、前記流体制御バルブが開状態と全閉状態とを繰り返すパルス制御を行うものである、請求項1乃至6の何れか一項に記載の流体制御装置。
【請求項8】
前記制御機構は、前記流体制御バルブを全閉させる場合に、前記一時停止させるステップ状の駆動信号を前記流体制御バルブに出力する、請求項1乃至7の何れか一項に記載の流体制御装置。
【請求項9】
前記制御機構は、前記流体制御バルブを全閉させる場合に、前記一時停止させた後に全閉状態とするステップ状の駆動信号を前記流体制御バルブに出力する、請求項1乃至8の何れか一項に記載の流体制御装置。
【請求項10】
駆動信号の値に応じて弁座面及び弁体の距離が変化する流体制御バルブに前記駆動信号を出力して前記流体制御バルブを制御する流体制御バルブの制御方法であって、
前記流体制御バルブを全閉させる場合に、全閉状態となる前に一時停止させるための駆動信号を前記流体制御バルブに出力し、その後、全閉状態とするための駆動信号を前記流体制御バルブに出力する、流体制御バルブの制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、流体制御装置、流体制御バルブの制御方法、流体制御方法、及び、流体制御プログラムに関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
例えば半導体製造プロセスにおいては、材料ガス等の流量制御に流体制御装置が用いられている。この流体制御装置は、駆動信号の値に応じて弁座面及び弁体の距離が変化する流体制御バルブと、駆動信号を出力して流体制御バルブを制御する制御機構とを有している。
【0003】
しかしながら、流体制御バルブを開状態から全閉状態とした場合には、弁座面と弁体とが衝突することになり、衝撃により弁座面又は弁体の表面(着座面)が損傷する恐れがある。弁座面又は着座面が損傷すると、全閉状態におけるリークの原因となってしまう。
【0004】
また、流体制御装置の用途によっては、流体制御バルブを開状態から全閉状態に短時間で切り替える場合又は開状態及び全閉状態を所定周期で繰り返す場合がある。これらの速応性を向上させる場合には、オーバーシュートが大きくなり、減衰性が低下してしまう。そうすると、オーバーシュート又は過渡応答の振動により、弁体に弁座面が食い込んでしまい、弁座面又は着座面が損傷しやすくなってしまう。
【0005】
ここで、特許文献1に示すように、弁座面及び弁体の間が所定距離となった後に弁体の移動速度を低下させることも考えられる。ところが、移動速度を低下させた後も引き続き弁体が弁座面に近づくため、移動速度を低下させた瞬間に起きるオーバーシュート又は過渡応答の振動によって弁体が弁座面に接触する恐れがある。
【先行技術文献】
【特許文献】
【0006】
特開2018-206387号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
そこで、本発明は、上述した問題を解決すべくなされたものであり、全閉時における弁座面又は弁体の損傷を低減することをその主たる課題とするものである。
【課題を解決するための手段】
【0008】
すなわち、本発明に係る流体制御装置は、駆動信号の値に応じて弁座面及び弁体の距離が変化する流体制御バルブと、前記駆動信号を出力して前記流体制御バルブを制御する制御機構とを備え、前記制御機構は、前記流体制御バルブを全閉させる場合に、全閉状態となる前に一時停止させるための駆動信号を前記流体制御バルブに出力し、その後、全閉状態とするための駆動信号を前記流体制御バルブに出力することを特徴とする。
【0009】
このような流体制御装置によれば、流体制御バルブを全閉させる場合に、全閉状態となる前に一時停止させた後に全閉状態としているので、一挙に全閉状態とした場合に比べて、弁座面及び弁体に加わる衝撃を軽減することができ、また、オーバーシュート及び過渡応答の振動による食い込みを低減することができる。その結果、弁座面又は弁体の損傷を低減することができる。
【0010】
また、前記制御機構は、前記流体制御バルブを全閉させる場合に、全閉状態となる前に前記弁座面と前記弁体との間を所定距離で一時停止させるための駆動信号を前記流体制御バルブに出力し、その後、全閉状態とするための駆動信号を前記流体制御バルブに出力することが考えられる。
この構成であれば、弁座面と弁体との間が所定距離となった状態で一時停止させているので、弁体の移動速度を低下させる制御に比べて、オーバーシュート又は過渡応答の振動によって弁体が弁座面に接触する恐れを低減することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
1か月前
ローム株式会社
基準電圧源
1か月前
愛知製鋼株式会社
車両用システム
2か月前
株式会社熊谷組
障害物の検出方法
24日前
株式会社FUJI
加工機械ライン
3か月前
株式会社クボタ
作業車
2日前
個人
作業車両自動化システム
2か月前
新電元工業株式会社
作業用ロボット
22日前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
豊田合成株式会社
機器制御装置
29日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
移動制御システム
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
生産管理システム
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
トヨタ自動車株式会社
減圧弁
2か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
制御装置
1か月前
トヨタ自動車株式会社
クラッチペダル
2か月前
カヤバ株式会社
減圧弁
1か月前
エイブリック株式会社
電流補償回路及び半導体装置
18日前
株式会社ダイフク
物品搬送設備
3日前
キヤノン株式会社
配送システム
1か月前
マーク ヘイリー
消防ロボット
3か月前
株式会社TMEIC
安全性診断装置
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
株式会社アマダ
工作機械制御装置
23日前
村田機械株式会社
搬送車システム
23日前
株式会社テイエルブイ
減圧弁の制御装置
3か月前
ルネサスエレクトロニクス株式会社
半導体装置
2か月前
日野自動車株式会社
自動運転装置
23日前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ