TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025157925
公報種別
公開特許公報(A)
公開日
2025-10-16
出願番号
2024060282
出願日
2024-04-03
発明の名称
情報処理システム、情報処理方法及びプログラム
出願人
株式会社センシンロボティクス
,
中部電力パワーグリッド株式会社
,
中部電力株式会社
代理人
One ip弁理士法人
主分類
G05D
1/622 20240101AFI20251008BHJP(制御;調整)
要約
【課題】移動体の経路設計を支援するための情報処理システム、情報処理方法、及び、プログラムを提供すること。
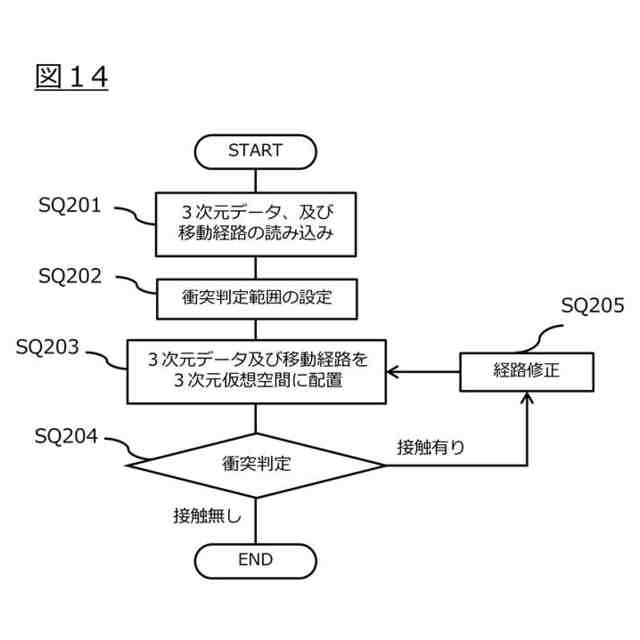
【解決手段】運行予定領域の周辺の3次元データを記憶する3次元データ記憶部と、運行予定領域における移動体の移動経路を記憶する経路情報記憶部と、3次元の仮想空間に運行予定領域周辺の3次元データ及び移動経路を配置し、3次元データと移動経路との接触の有無を判定する衝突判定部と、を備える情報処理システム。
【選択図】図14
特許請求の範囲
【請求項1】
運行予定領域の周辺の3次元データを記憶する3次元データ記憶部と、
前記運行予定領域における移動体の移動経路を記憶する経路情報記憶部と、
3次元の仮想空間に前記3次元データ及び前記移動経路を配置し、前記3次元データと前記移動経路との接触の有無を判定する衝突判定部と、を備える情報処理システム。
続きを表示(約 660 文字)
【請求項2】
前記移動経路は、ウェイポイント情報を含み、
前記衝突判定部は、前記移動経路中のウェイポイント及びウェイポイント間を結ぶ直線の周囲に衝突判定範囲を設定し、当該衝突判定範囲を有する前記移動経路と前記3次元データとの接触の有無を判定する、請求項1に記載の情報処理システム。
【請求項3】
前記移動経路を修正する経路補正部を、さらに備え、
前記衝突判定部は、前記3次元データと前記移動経路との接触を検知した場合に、当該接触を検知した区間を特定する衝突危険区間情報を生成し、
前記経路補正部は、前記衝突危険区間情報により特定される前記区間に含まれる少なくとも1つのウェイポイントの位置を修正し、修正経路情報を生成する、請求項1又は2に記載の情報処理システム。
【請求項4】
運行予定領域の周辺の3次元データと、前記運行予定領域における移動体の移動経路と、を読み出すステップと、
3次元の仮想空間に前記3次元データ及び前記移動経路を配置し、前記3次元データと前記移動経路との接触の有無を判定するステップと、をコンピュータが実行する情報処理方法。
【請求項5】
運行予定領域の周辺の3次元データと、前記運行予定領域における移動体の移動経路と、を読み出す処理と、
3次元の仮想空間に前記3次元データ及び前記移動経路を配置し、前記3次元データと前記移動経路との接触の有無を判定する処理と、をコンピュータに実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体の経路設計に関連する情報処理システム、情報処理方法、及び、プログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
近年、人が搭乗する有人の移動体だけでなく、ドローン(Drone)、無人航空機(UAV:Unmanned Aerial Vehicle)、無人地上車両(UGV:Unmanned Ground Vehicle)などの様々な移動体(以下、有人機及び無人機を含めて「移動体」と総称する)が産業に利用され始めている。こうした中で、特許文献1には、飛行体により電力線を撮影して検査するシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-196355号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1の開示技術では、予め飛行体の経路を設定しておく必要がある。飛行体の経路は、地図及び/又は検査対象物の座標を参照して設計されることが一般的であるが、飛行体を運行させる現場では、設計時の参照データには表れていない構造物、樹木等の障害物が存在する場合がある。そのため、飛行体の経路を決定する際には、作業者(操縦者又は設計担当者等)が実際の現場を訪れ、飛行経路と障害物との間隔を目測で確認する等の対策が取られている。ただし、このような対策では目測誤差による影響を受けるため、障害物との衝突を回避するためのより正確な経路設計が求められている。
【0005】
本開示の例示的な実施形態の目的は、移動体の経路設計を支援するための情報処理システム、情報処理方法、及び、プログラムを提供することである。
【課題を解決するための手段】
【0006】
本開示の一様態に関わる情報処理システムは、
運行予定領域の周辺の3次元データを記憶する3次元データ記憶部と、
前記運行予定領域における移動体の移動経路を記憶する経路情報記憶部と、
3次元の仮想空間に前記3次元データ及び前記移動経路を配置し、前記3次元データと前記移動経路との接触の有無を判定する衝突判定部と、を備える。
【0007】
情報処理システムが上記の特徴を有することで、障害物との衝突リスクの低い安全な経路の設計を支援することができる。
【図面の簡単な説明】
【0008】
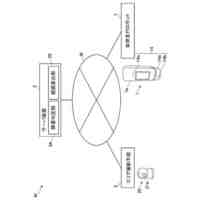
図1は、本開示における一実施形態に係わる情報処理システムの構成を例示する図である。
図2は、図1に示す管理サーバのハードウェア構成を示すブロック図である。
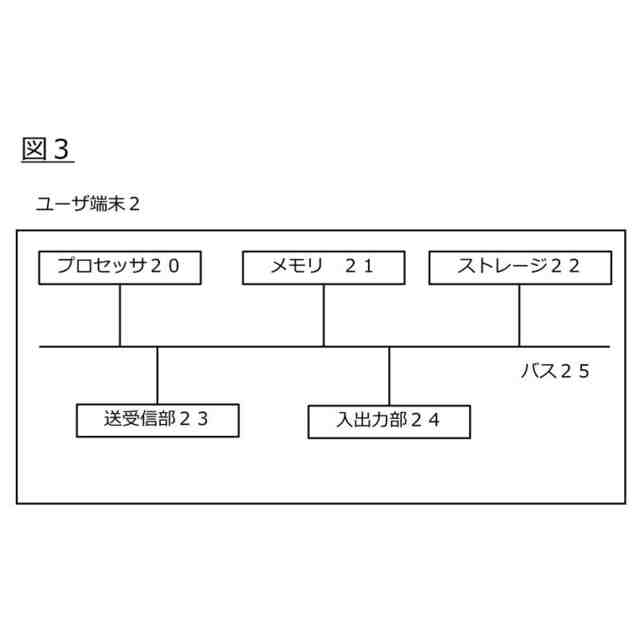
図3は、図1に示すユーザ端末のハードウェア構成を示すブロック図である。
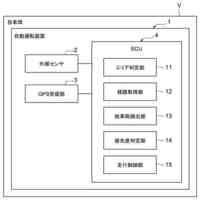
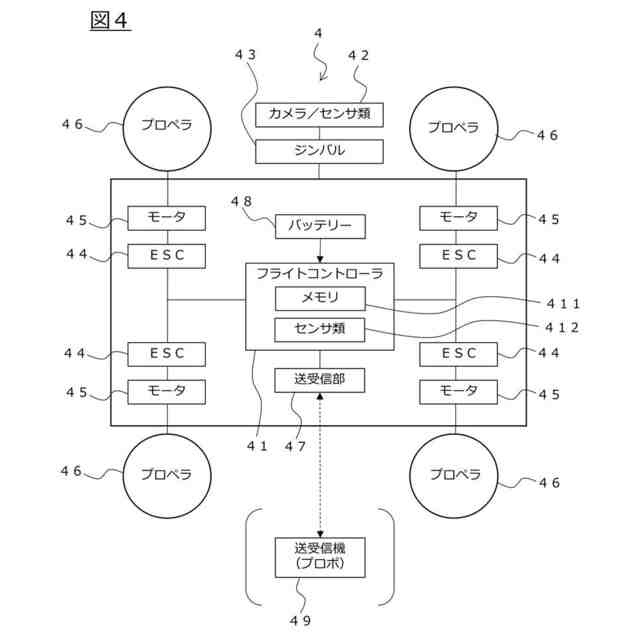
図4は、図1に示す飛行体のハードウェア構成を示すブロック図である。
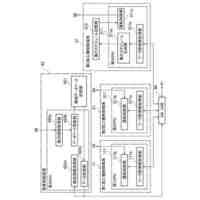
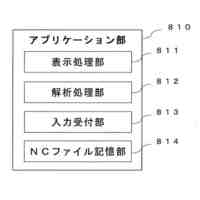
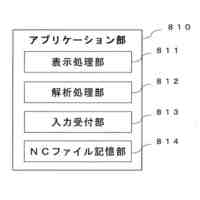
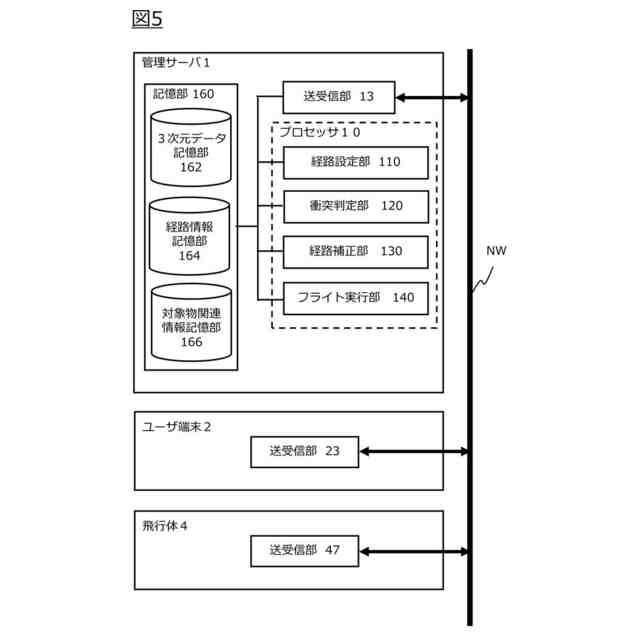
図5は、管理サーバの機能を例示するブロック図である。
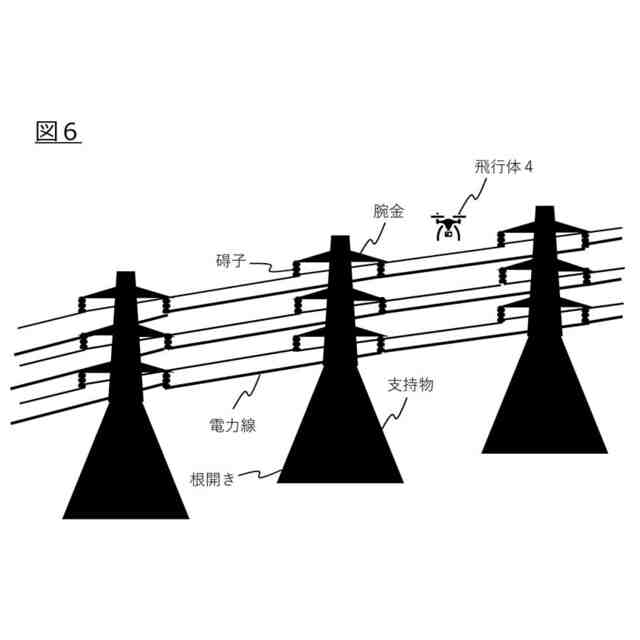
図6は、図1に示す情報処理システムの運用例を示す概念図である。
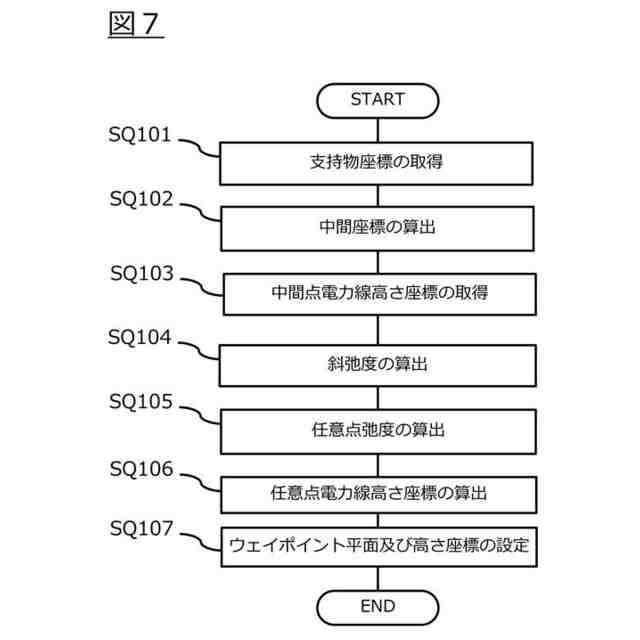
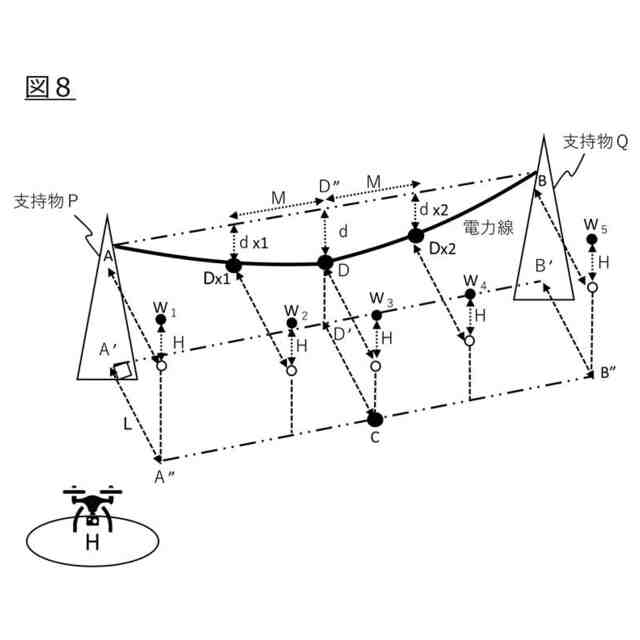
図7は、経路設計方法の一例を示すフローチャートである。
図8は、図7で示す経路設計方法を説明するための概念図である。
図9は、3次元データの一例を模式的に示す概念図である。
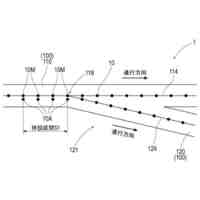
図10は、衝突判定に関わる処理を説明するための概念図である。
図11は、衝突判定範囲について説明するための概念図である。
図12は、経路補正に関わる処理の一例を説明するための概念図である。
図13は、経路補正に関わる処理の他の例を説明するための概念図である。
図14は、衝突判定処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
本開示の情報処理方法、情報処理システム及びプログラムは、例えば、以下のような構成を備える。
[項目1]
運行予定領域の周辺の3次元データを記憶する3次元データ記憶部と、
前記運行予定領域における移動体の移動経路を記憶する経路情報記憶部と、
3次元の仮想空間に前記3次元データ及び前記移動経路を配置し、前記3次元データと前記移動経路との接触の有無を判定する衝突判定部と、を備える情報処理システム。
[項目2]
前記移動経路は、ウェイポイント情報を含み、
前記衝突判定部は、前記移動経路中のウェイポイント及びウェイポイント間を結ぶ直線の周囲に衝突判定範囲を設定し、当該衝突判定範囲を有する前記移動経路と前記3次元データとの接触の有無を判定する、項目1に記載の情報処理システム。
[項目3]
前記移動経路を修正する経路補正部を、さらに備え、
前記衝突判定部は、前記3次元データと前記移動経路との接触を検知した場合に、当該接触を検知した区間を特定する衝突危険区間情報を生成し、
前記経路補正部は、前記衝突危険区間情報により特定される前記区間に含まれる少なくとも1つのウェイポイントの位置を修正し、修正経路情報を生成する、項目1又は2に記載の情報処理システム。
[項目4]
運行予定領域の周辺の3次元データと、前記運行予定領域における移動体の移動経路と、を読み出すステップと、
3次元の仮想空間に前記3次元データ及び前記移動経路を配置し、前記3次元データと前記移動経路との接触の有無を判定するステップと、をコンピュータが実行する情報処理方法。
[項目5]
運行予定領域の周辺の3次元データと、前記運行予定領域における移動体の移動経路と、を読み出す処理と、
3次元の仮想空間に前記3次元データ及び前記移動経路を配置し、前記3次元データと前記移動経路との接触の有無を判定する処理と、をコンピュータに実行させるためのプログラム。
【0010】
<実施の形態の詳細>
本開示の一実施形態に係わる情報処理システムを、図面を参照しつつ説明する。添付の各図面において、同一または類似の要素には同一または類似の参照符号及び名称が付され、実施形態の説明において同一または類似の要素に関する重複する説明は省略することがある。なお、各図面に示す内容は、あくまでも、本実施形態を説明するための例示であり、本実施形態を説明し易いように概略的に示す例示にすぎない。各図面の内容は、技術的に問題が生じない範囲内で改変したり、変更したりしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
3か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
株式会社FUJI
加工機械ライン
4か月前
株式会社熊谷組
障害物の検出方法
1か月前
愛知製鋼株式会社
車両用システム
2か月前
ローム株式会社
基準電圧源
2か月前
個人
作業車両自動化システム
3か月前
株式会社クボタ
作業車
19日前
新電元工業株式会社
作業用ロボット
1か月前
豊田合成株式会社
機器制御装置
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
生産管理システム
3か月前
トヨタ自動車株式会社
移動制御システム
3か月前
株式会社アサヒエンタープライズ
調整弁
6日前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
4か月前
トヨタ自動車株式会社
減圧弁
3か月前
マーク ヘイリー
消防ロボット
3か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
20日前
株式会社ダイフク
物品搬送設備
4か月前
カヤバ株式会社
減圧弁
1か月前
キヤノン株式会社
配送システム
2か月前
トヨタ自動車株式会社
クラッチペダル
2か月前
トヨタ自動車株式会社
制御装置
1か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
株式会社アマダ
工作機械制御装置
1か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
株式会社CAOS
移動体の制御システム
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
3か月前
日野自動車株式会社
自動運転装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ