TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025149094
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049537
出願日
2024-03-26
発明の名称
移動体、自己位置推定方法及びプログラム
出願人
三菱重工業株式会社
,
国立大学法人 筑波大学
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/246 20240101AFI20251001BHJP(制御;調整)
要約
【課題】移動体の旋回時の自己位置推定処理の安定化を図る。
【解決手段】移動体は、移動体が移動する環境を計測して得られた点群データと基準データとに基づいて、移動体の方位角の角度ずれを推定する推定部110と、推定した方位角の角度ずれと前回の移動体の自己位置推定の結果とに基づいて、点群地図データを用いた移動体の自己位置推定の初期値を生成する生成部120と、生成した初期値と点群地図データとを用いて移動体の自己位置を推定する自己位置推定部130と、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
移動体が移動する環境を計測して得られた点群データと基準データとに基づいて、前記移動体の方位角の角度ずれを推定する推定部と、
推定した前記方位角の角度ずれと前回の前記移動体の自己位置推定の結果とに基づいて、点群地図データを用いた前記移動体の自己位置推定の初期値を生成する生成部と、
生成した前記初期値と前記点群地図データとを用いて前記移動体の自己位置を推定する自己位置推定部と、
を備える、移動体。
続きを表示(約 1,100 文字)
【請求項2】
前記推定部は、前記点群データ及び前記基準データの各々から点群の特徴部分を抽出し、抽出した前記特徴部分を比較して、前記移動体の方位角の角度ずれを推定する、請求項1に記載の移動体。
【請求項3】
前記推定部は、前記点群データ及び前記基準データの前記特徴部分を解析して正規分布を抽出し、前記正規分布のヒストグラム同士を比較して、前記移動体の方位角の角度ずれを推定する、請求項2に記載の移動体。
【請求項4】
前記推定部は、前記ヒストグラム同士の一致度を定量化し、最大となる前記ヒストグラムの位置に基づいて前記移動体の方位角の角度ずれを推定する、請求項3に記載の移動体。
【請求項5】
前記基準データは、前回の自己位置の推定で用いた前記点群データである、
請求項3に記載の移動体。
【請求項6】
前記生成部は、前記点群データから抽出する点群の特徴部分の数が判定閾値よりも少ない場合、前記移動体の動きをセンシングした結果に基づいて、前記初期値を生成する、
請求項1に記載の移動体。
【請求項7】
前記推定部は、前記移動体の動きをセンシングした結果に基づいて、前記移動体の前記角度の範囲を予想し、該範囲に応じた前記正規分布のヒストグラム同士を比較して、前記移動体の方位角の角度ずれを推定する、請求項3に記載の移動体。
【請求項8】
自動で移動する移動体の自己位置推定方法であって、
前記移動体が移動する環境を計測して得られた点群データと基準データとに基づいて、前記移動体の方位角の角度ずれを推定する推定ステップと、
推定した前記方位角の角度ずれと前回の前記移動体の自己位置推定の結果とに基づいて、点群地図データを用いた前記移動体の自己位置推定の初期値を生成する生成ステップと、
生成した前記初期値と前記点群地図データとを用いて前記移動体の自己位置を推定する自己位置推定ステップと、
を含む、自己位置推定方法。
【請求項9】
移動体の自己位置推定方法をコンピュータに実行させるプログラムであって、
前記移動体が移動する環境を計測して得られた点群データと基準データとに基づいて、前記移動体の方位角の角度ずれを推定する推定ステップと、
推定した前記方位角の角度ずれと前回の前記移動体の自己位置推定の結果とに基づいて、点群地図データを用いた前記移動体の自己位置推定の初期値を生成する生成ステップと、
生成した前記初期値と前記点群地図データとを用いて前記移動体の自己位置を推定する自己位置推定ステップと、
をコンピュータに実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体、自己位置推定方法及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
周囲を検出するセンサを備えて自動で移動する移動体が知られている。例えば特許文献1には、距離センサにより計測された物体までの距離と、自律移動ロボットの移動環境を示す地図情報とに基づいて自己位置を推定する旨が記載されている。
【先行技術文献】
【特許文献】
【0003】
特許第5949814号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、移動体は、旋回中に車体の角度が急速に変化するため、旋回中の自己位置推定には、改善の余地がある。
【0005】
本開示は、上述した課題を解決するものであり、移動体の旋回時の自己位置推定処理の安定化を図る移動体、自己位置推定方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る移動体は、移動体が移動する環境を計測して得られた点群データと基準データとに基づいて、前記移動体の方位角の角度ずれを推定する推定部と、推定した前記方位角の角度ずれと前回の前記移動体の自己位置推定の結果とに基づいて、点群地図データを用いた前記移動体の自己位置推定の初期値を生成する生成部と、生成した前記初期値と前記点群地図データとを用いて前記移動体の自己位置を推定する自己位置推定部と、を備える。
【0007】
本開示に係る自己位置推定方法は、自動で移動する移動体の自己位置推定方法であって、前記移動体が移動する環境を計測して得られた点群データと基準データとに基づいて、前記移動体の方位角の角度ずれを推定する推定ステップと、推定した前記方位角の角度ずれと前回の前記移動体の自己位置推定の結果とに基づいて、点群地図データを用いた前記移動体の自己位置推定の初期値を生成する生成ステップと、生成した前記初期値と前記点群地図データとを用いて前記移動体の自己位置を推定する自己位置推定ステップと、を含む。
【0008】
本開示に係るプログラムは、移動体の自己位置推定方法をコンピュータに実行させるプログラムであって、前記移動体が移動する環境を計測して得られた点群データと基準データとに基づいて、前記移動体の方位角の角度ずれを推定する推定ステップと、推定した前記方位角の角度ずれと前回の前記移動体の自己位置推定の結果とに基づいて、点群地図データを用いた前記移動体の自己位置推定の初期値を生成する生成ステップと、生成した前記初期値と前記点群地図データとを用いて前記移動体の自己位置を推定する自己位置推定ステップと、をコンピュータに実行させる。
【発明の効果】
【0009】
本開示によれば、移動体の旋回時の自己位置推定処理の安定化を図ることができる。
【図面の簡単な説明】
【0010】
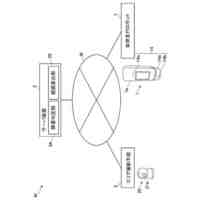
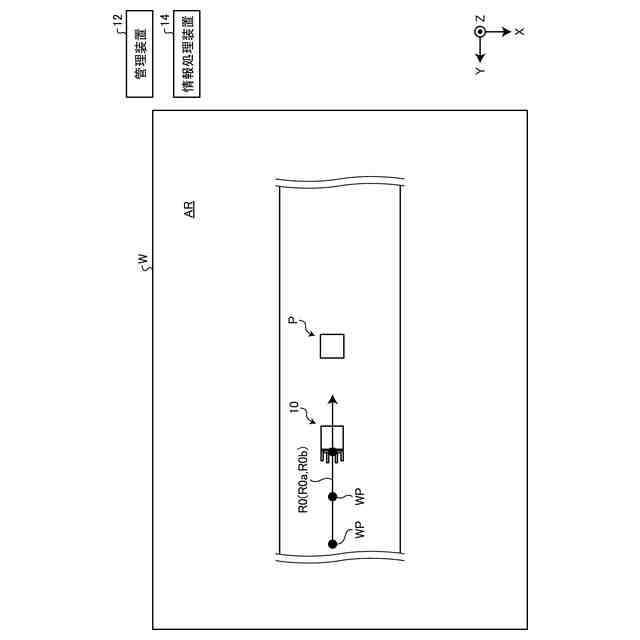
図1は、本実施形態に係る移動制御システムの模式図である。
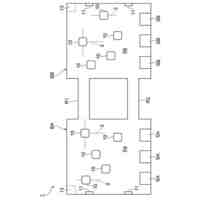
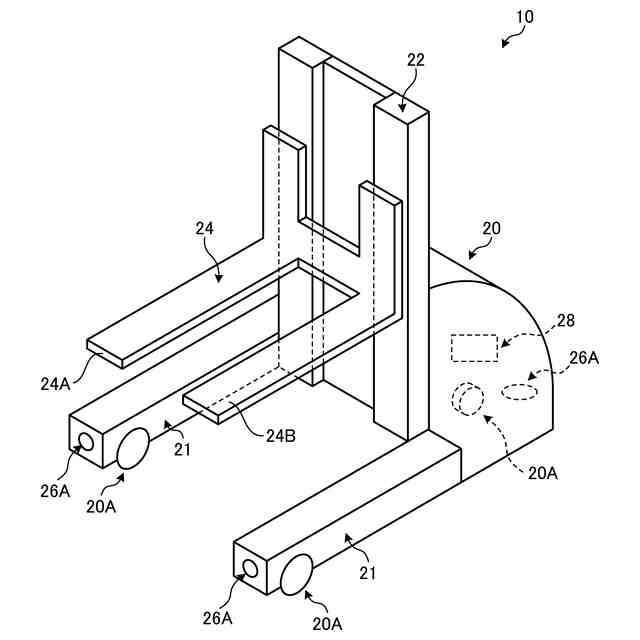
図2は、移動体の構成の模式図である。
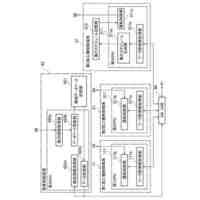
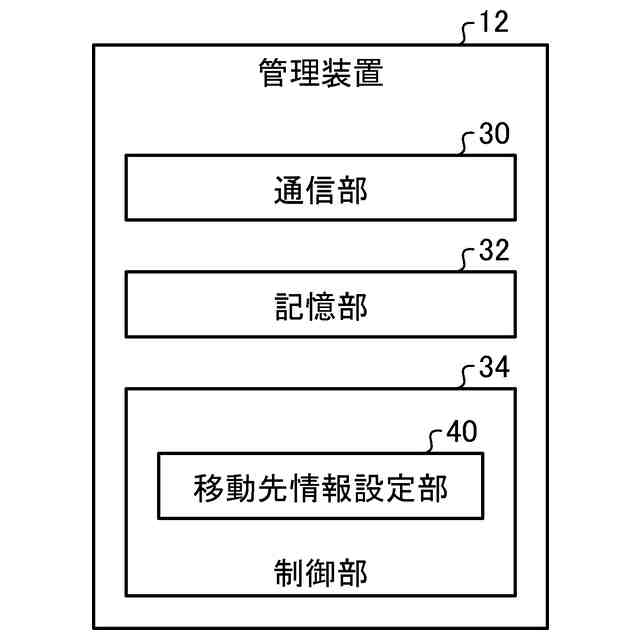
図3は、管理装置の模式的なブロック図である。
図4は、情報処理装置の模式的なブロック図である。
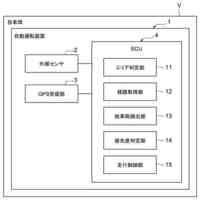
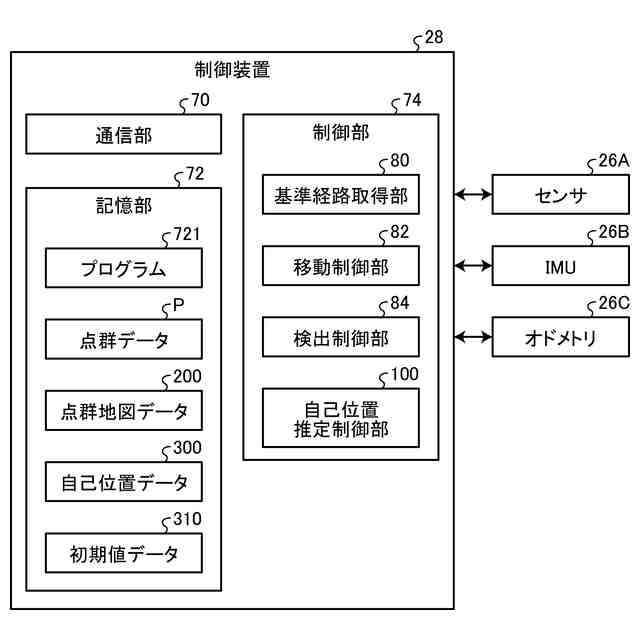
図5は、移動体の制御装置の模式的なブロック図である。
図6は、自己位置推定のアルゴリズムの一例を示すフォローチャートである。
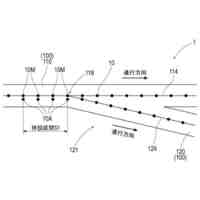
図7は、並進ずれの場合の点群の収束例を説明するための図である。
図8は、回転を伴う場合の点群の課題を説明するための図である。
図9は、図5に示す自己位置推定制御部のアーキテクチャの一例を示す図である。
図10は、図9の推定部の処理の一例を説明するための図である。
図11は、正規分布抽出処理の一例を説明するための図である。
図12は、正規分布で近似する処理の一例を説明するための図である。
図13は、ヒストグラム化の一例を説明するための図である。
図14は、ヒストグラム間の比較方法を説明するための図である。
図15は、ヒストグラム間の比較方法を説明するための図である。
図16は、第2実施形態に係る自己位置推定制御部のアーキテクチャの一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
ローム株式会社
基準電圧源
1か月前
株式会社FUJI
加工機械ライン
3か月前
愛知製鋼株式会社
車両用システム
2か月前
株式会社熊谷組
障害物の検出方法
29日前
株式会社クボタ
作業車
7日前
新電元工業株式会社
作業用ロボット
27日前
個人
作業車両自動化システム
3か月前
豊田合成株式会社
機器制御装置
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
3か月前
トヨタ自動車株式会社
移動制御システム
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
減圧弁
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
4か月前
マーク ヘイリー
消防ロボット
3か月前
トヨタ自動車株式会社
制御装置
1か月前
トヨタ自動車株式会社
クラッチペダル
2か月前
エイブリック株式会社
電流補償回路及び半導体装置
23日前
株式会社ダイフク
物品搬送設備
8日前
カヤバ株式会社
減圧弁
1か月前
キヤノン株式会社
配送システム
2か月前
株式会社ダイフク
物品搬送設備
1か月前
日野自動車株式会社
自動運転装置
28日前
株式会社アマダ
工作機械制御装置
28日前
アズビル株式会社
制御システムおよび制御方法
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
株式会社CAOS
移動体の制御システム
1か月前
村田機械株式会社
搬送車システム
28日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ