TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136387
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034916
出願日
2024-03-07
発明の名称
制御装置、制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250911BHJP(信号)
要約
【課題】移動体の乗員(例えばドライバ)にとって好適な警報を出力すること。
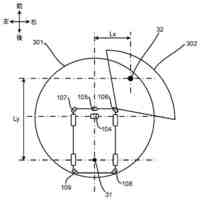
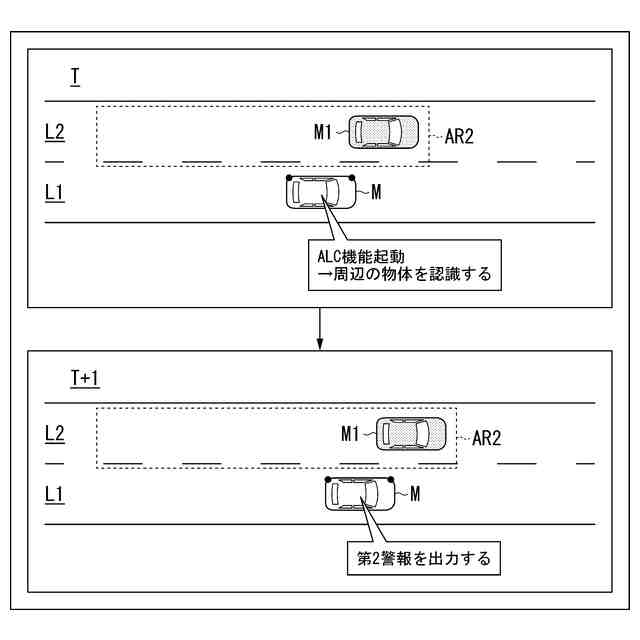
【解決手段】制御装置は、操作に応じて移動体が走行する第1車線に隣接する第2車線に存在し且つ前記移動体の周辺に存在する物体が存在する前記第2車線に前記移動体が移動すると推定した場合に、第1警報を行い、操作に応じて前記移動体を前記物体が存在する前記第2車線に自動で車線変更させる自動車線変更制御を起動し、前記車線変更が可能であると判定した場合、前記移動体を前記第2車線に自動で車線変更させ、前記車線変更が可能でないと判定した場合、前記移動体を前記第2車線に自動で車線変更させることができないことを前記乗員に知らせる第2警報を行う。制御装置は、前記第1警報と前記第2警報とのいずれか一方の警報を行った場合に前記いずれか一方とは異なる警報を行う条件を満たしても前記異なる警報を行うことを抑制する。
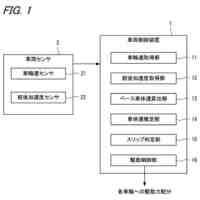
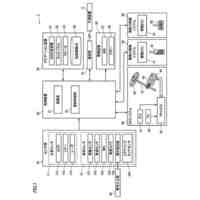
【選択図】図1
特許請求の範囲
【請求項1】
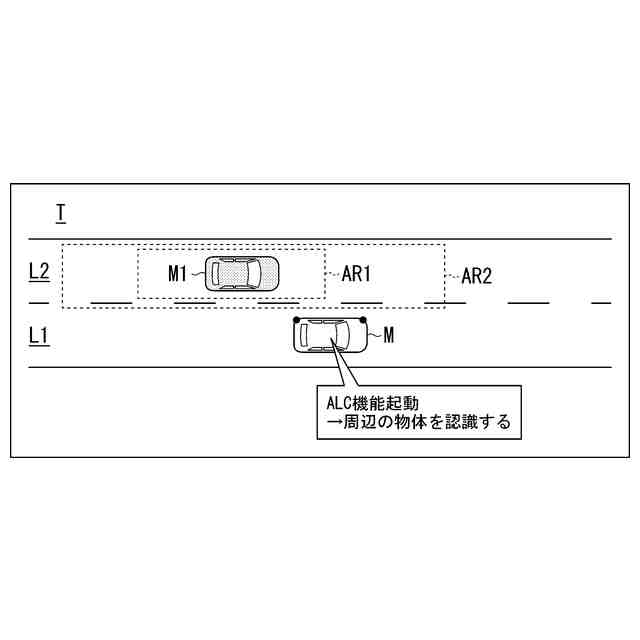
移動体が走行する第1車線に隣接する第2車線に存在し且つ前記移動体の周辺に存在する物体を認識する認識部と、
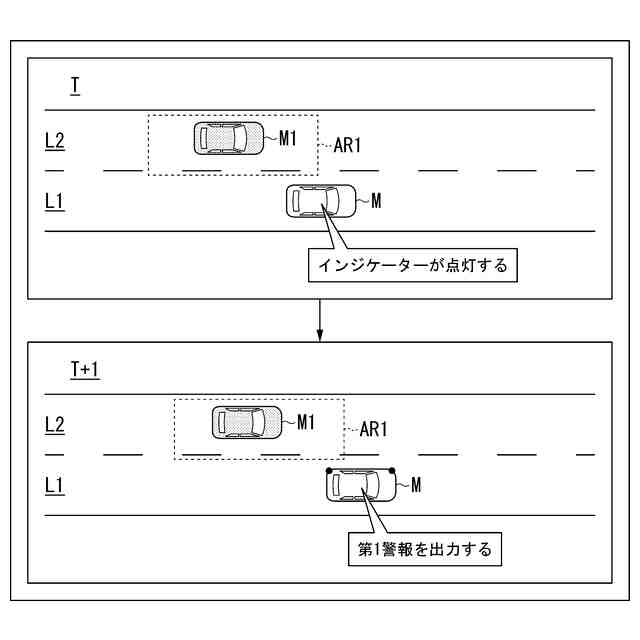
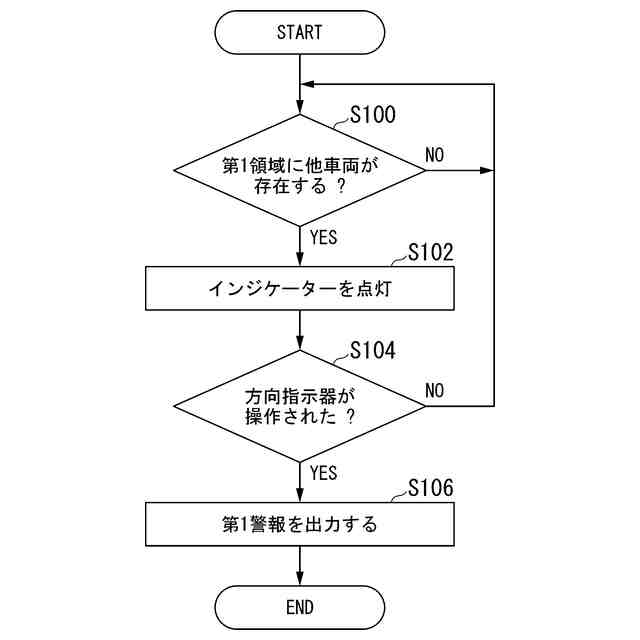
前記移動体の乗員によって行われた操作に応じて前記物体が存在する前記第2車線に前記移動体が移動すると推定した場合に、第1警報を行う第1処理部と、
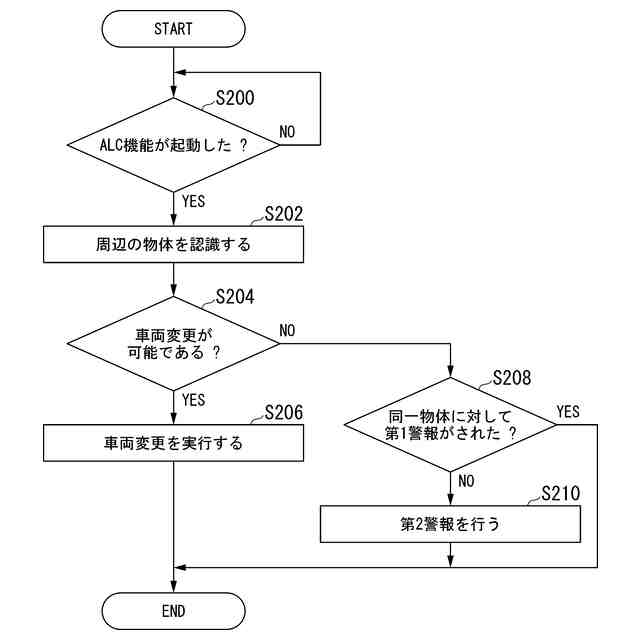
前記乗員によって行われた操作に応じて前記移動体を前記物体が存在する前記第2車線に自動で車線変更させる自動車線変更制御を起動し、
前記車線変更が可能であると判定した場合、前記移動体を前記第2車線に自動で車線変更させ、
前記車線変更が可能でないと判定した場合、前記移動体を前記第2車線に自動で車線変更させることができないことを前記乗員に知らせる第2警報を行う第2処理部とを含む、処理部を備え、
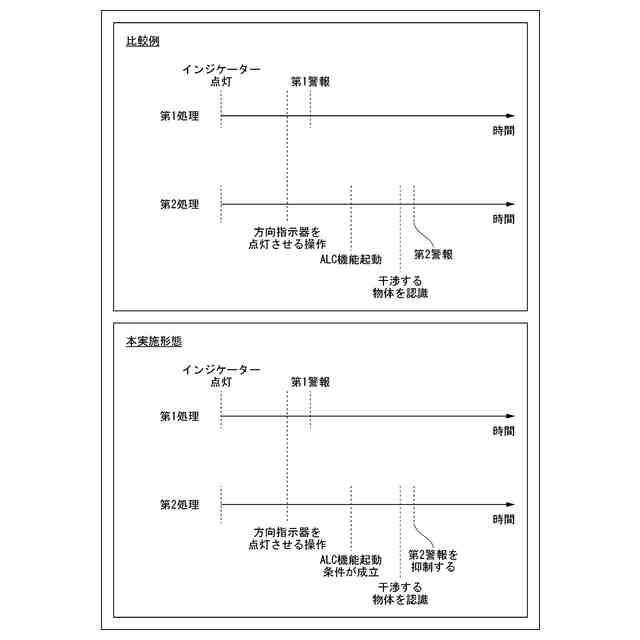
前記処理部は、前記第1警報と前記第2警報とのいずれか一方の警報を行った場合に前記いずれか一方とは異なる警報を行う条件を満たしても前記異なる警報を行うことを抑制する、
制御装置。
続きを表示(約 1,500 文字)
【請求項2】
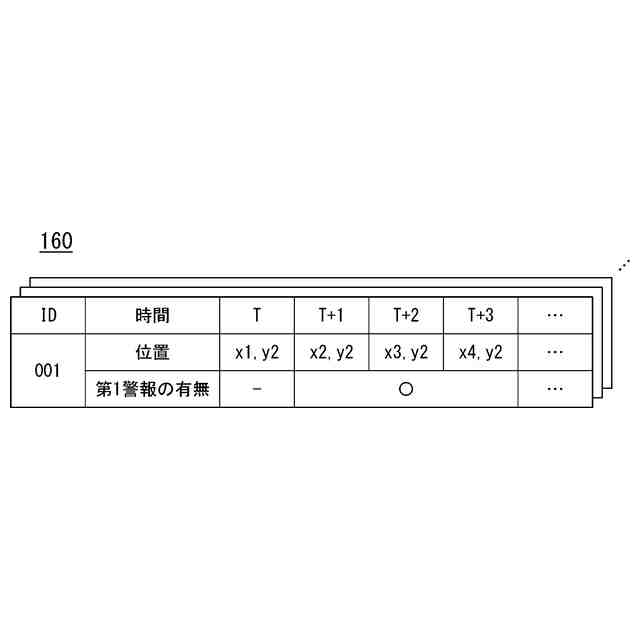
前記処理部は、前記物体である第1物体に対して前記一方の警報を行った場合に前記第1物体に対して前記異なる警報を行う条件を満たしたても前記異なる警報を行うことを抑制する、
請求項1に記載の制御装置。
【請求項3】
前記処理部は、前記物体である第1物体に対して前記一方の警報を行った場合に前記第1物体とは異なる第2物体に対して前記異なる警報を行う条件を満たしたとき前記異なる警報を抑制しない、
請求項1に記載の制御装置。
【請求項4】
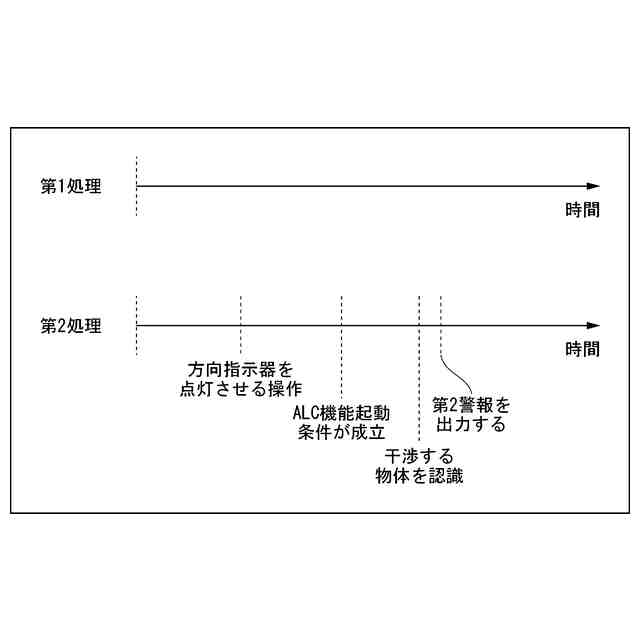
前記第1警報は、前記乗員によって操作が行われたときに行われ、
前記第2警報は、前記乗員によって前記操作が行われたときから所定時間経過後に前記自動で車線変更が可能でないと判定した場合に行われる、
請求項1に記載の制御装置。
【請求項5】
前記処理部は、
前記乗員によって行われた操作に応じて、
前記第1警報を行い、
前記移動体を前記物体が存在する前記第2車線に自動で車線変更させる自動車線変更制御が起動し、
前記車線変更が可能でないと判定した場合、前記第2警報を抑制し、その後、再度、前記乗員によって行われた操作に応じて自動車線変更制御が起動した場合、前記第2警報を行う、
請求項4に記載の制御装置。
【請求項6】
前記処理部は、
前記第1警報と前記第2警報とのいずれか一方の警報を行った後、所定時間が経過した、または前記移動体が所定距離移動したときに前記いずれか一方とは異なる警報を行う条件を満たした場合、前記異なる警報を行う、
請求項1に記載の制御装置。
【請求項7】
前記第1警報および前記第2警報のトリガーとなる前記移動体の乗員によって行われる操作は、同一の操作子に対する操作である、
請求項1に記載の制御装置。
【請求項8】
前記操作子は、方向指示器を点灯させる操作子である、
請求項7に記載の制御装置。
【請求項9】
前記第1警報は、前記移動体の乗員が視認しにくい前記移動体の側方のブラインドスポットに他の移動体が存在し、且つ前記他の移動体が走行する車線に前記乗員が車線変更するように方向指示器を点灯させた場合にブラインドスポットに存在する前記他の移動体の存在を通知する警報である、
請求項1に記載の制御装置。
【請求項10】
移動体が走行する第1車線に隣接する第2車線に存在し且つ前記移動体の周辺に存在する物体を認識する認識部と、
前記移動体の乗員による操作子に対する第1操作に応じて前記物体が存在する前記第2車線に前記移動体が移動すると推定した場合に、第1警報を行う第1処理部と、
前記乗員による前記操作子に対する第2操作に応じて前記移動体を前記物体が存在する前記第2車線に自動で車線変更させる自動車線変更制御を起動し、
前記車線変更が可能であると判定した場合、前記移動体を前記第2車線に自動で車線変更させ、
前記車線変更が可能でないと判定した場合、前記移動体を前記第2車線に自動で車線変更させることができないことを前記乗員に知らせる第2警報を行う第2処理部と、を含む処理部と、を備え、
前記処理部は、前記第1操作が行われ前記第1操作に連続して前記第2操作が行われた場合に、前記第1操作に応じて前記第1警報を行い、前記第1操作に連続して行われた前記第2操作に応じて前記車線変更が可能でないと判定した場合、前記第2警報を抑制する、
制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法、およびプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、種々の状況に配慮した持続可能な輸送システムを提供する取り組みが活発化している。この実現に向けて運転支援技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。例えば、道路が渋滞中に運転者が隣接走行車線の後側方の道路の状態を認知していると推定したときには、運転者が車線変更を行おうとして方向指示器を操作したときに、車両が車線変更を行おうとしている隣接走行車線の後側方の所定の範囲に接近する他車両を検出した場合であっても警報の出力を抑制する後側方接近物警報装置が開示されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2015-132966号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、他の警報を出力する機能との関係については考慮されていなかった。このため、移動体の乗員(例えばドライバ)にとって警報が好適でないことがあった。例えば移動体の乗員が警報に対して煩わしさを感じることがあった。
【0005】
本発明は、このような事情を考慮してなされたものであり、移動体の乗員(例えばドライバ)にとって好適な警報を出力することができる制御装置、制御方法、およびプログラムを提供することを目的の一つとする。例えば移動体の乗員の煩わしさを抑制することができる。延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0006】
この発明に係る制御装置、制御方法、およびプログラムは、以下の構成を採用した。
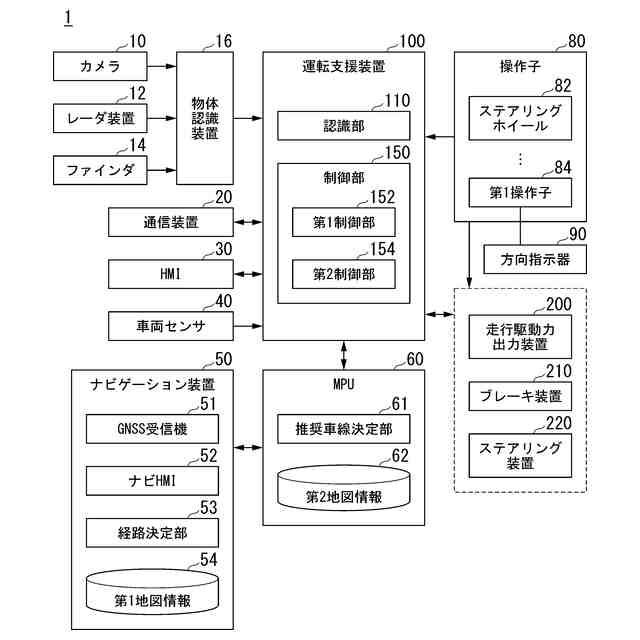
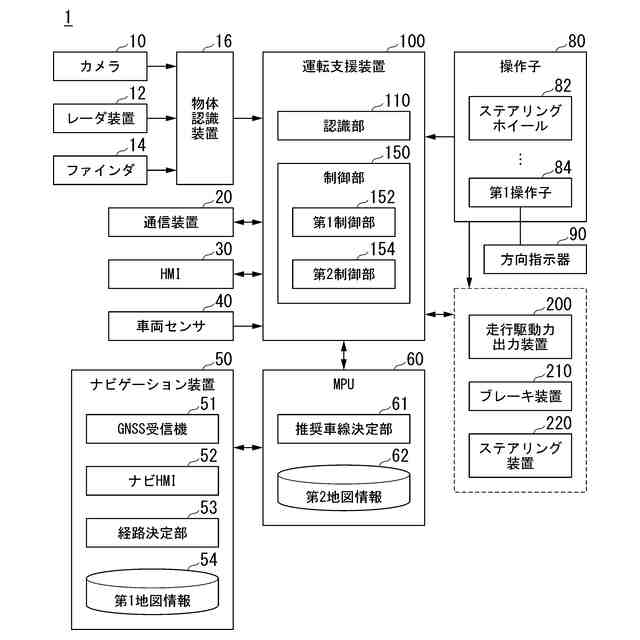
(1):この発明の一態様に係る制御装置は、移動体が走行する第1車線に隣接する第2車線に存在し且つ前記移動体の周辺に存在する物体を認識する認識部と、前記移動体の乗員によって行われた操作に応じて前記物体が存在する前記第2車線に前記移動体が移動すると推定した場合に、第1警報を行う第1処理部と、前記乗員によって行われた操作に応じて前記移動体を前記物体が存在する前記第2車線に自動で車線変更させる自動車線変更制御を起動し、前記車線変更が可能であると判定した場合、前記移動体を前記第2車線に自動で車線変更させ、前記車線変更が可能でないと判定した場合、前記移動体を前記第2車線に自動で車線変更させることができないことを前記乗員に知らせる第2警報を行う第2処理部と、を含む処理部と、を備え、前記処理部は、前記第1警報と前記第2警報とのいずれか一方の警報を行った場合に前記いずれか一方とは異なる警報を行う条件を満たしても前記異なる警報を行うことを抑制する制御装置である。
【0007】
(2):上記(1)の態様において、前記処理部は、前記物体である第1物体に対して前記一方の警報を行った場合に前記第1物体に対して前記異なる警報を行う条件を満たしたても前記異なる警報を行うことを抑制する。
【0008】
(3):上記(1)の態様において、前記処理部は、前記物体である第1物体に対して前記一方の警報を行った場合に前記第1物体とは異なる第2物体に対して前記異なる警報を行う条件を満たしたとき前記異なる警報を抑制しない。
【0009】
(4):上記(1)のいずれかの態様において、前記第1警報は、前記乗員によって操作が行われたときに行われ、前記第2警報は、前記乗員によって前記操作が行われたときから所定時間経過後に前記自動で車線変更が可能でないと判定した場合に行われる。
【0010】
(5):上記(1)の態様において、前記処理部は、前記乗員によって行われた操作に応じて、前記第1警報を行い、前記移動体を前記物体が存在する前記第2車線に自動で車線変更させる自動車線変更制御が起動し、前記車線変更が可能でないと判定した場合、前記第2警報を抑制し、その後、再度、前記乗員によって行われた操作に応じて自動車線変更制御が起動した場合、前記第2警報を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
25日前
本田技研工業株式会社
装置
今日
本田技研工業株式会社
車両
1日前
本田技研工業株式会社
内燃機関
今日
本田技研工業株式会社
通知装置
今日
本田技研工業株式会社
電解装置
8日前
本田技研工業株式会社
回転機械
24日前
本田技研工業株式会社
ロボット
23日前
本田技研工業株式会社
内燃機関
今日
本田技研工業株式会社
触媒インク
25日前
本田技研工業株式会社
触媒インク
25日前
本田技研工業株式会社
鞍乗型車両
7日前
本田技研工業株式会社
リアクトル
今日
本田技研工業株式会社
鞍乗り型車両
24日前
本田技研工業株式会社
動力伝達装置
22日前
本田技研工業株式会社
鞍乗り型車両
17日前
本田技研工業株式会社
固体二次電池
7日前
本田技研工業株式会社
クラッチ装置
16日前
本田技研工業株式会社
鞍乗り型車両
15日前
本田技研工業株式会社
車両制御装置
9日前
本田技研工業株式会社
鞍乗り型車両
24日前
本田技研工業株式会社
作業システム
24日前
本田技研工業株式会社
潤滑システム
7日前
本田技研工業株式会社
車両制御装置
7日前
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
管理システム
1か月前
本田技研工業株式会社
電力変換装置
1か月前
本田技研工業株式会社
導体接合方法
1か月前
本田技研工業株式会社
位置推定装置
1か月前
本田技研工業株式会社
車両制御装置
1か月前
本田技研工業株式会社
車両制御装置
1日前
本田技研工業株式会社
鞍乗り型車両
29日前
本田技研工業株式会社
水電解システム
21日前
本田技研工業株式会社
水電解システム
1か月前
本田技研工業株式会社
非接触受電装置
23日前
本田技研工業株式会社
水電解システム
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ