TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134489
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032428
出願日
2024-03-04
発明の名称
推定装置、推定方法、及び推定プログラム
出願人
株式会社豊田中央研究所
,
株式会社デンソー
代理人
弁理士法人太陽国際特許事務所
主分類
G08G
1/16 20060101AFI20250909BHJP(信号)
要約
【課題】走行車線前方の三次元座標を精度良く推定することができる推定装置、推定方法、及び推定プログラムを得る。
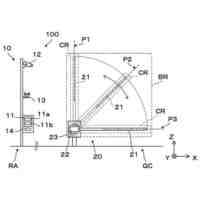
【解決手段】推定装置は、車両に搭載された撮影装置により撮影された前記車両が走行する走路の画像である走路画像を取得し、前記走路画像に基づいて車線の境界を抽出し、前記走路画像における左右の車線の境界上の対応する2点の傾きが所定の条件を満たす2点を選択し、選択した2点の前記走路画像上の座標に基づいて、選択した2点に対応する車線の境界の3次元座標及び車線の中心の3次元座標の少なくとも一方を導出する。
【選択図】図2
特許請求の範囲
【請求項1】
車両に搭載された撮影装置により撮影された前記車両が走行する走路の画像である走路画像を取得する取得部と、
前記走路画像に基づいて車線の境界を抽出する抽出部と、
前記走路画像における左右の車線の境界上の対応する2点の傾きが所定の条件を満たす2点を選択する選択部と、
前記選択部により選択された2点の前記走路画像上の座標に基づいて、選択された2点に対応する車線の境界の3次元座標及び車線の中心の3次元座標の少なくとも一方を導出する導出部と、
を含む推定装置。
続きを表示(約 1,200 文字)
【請求項2】
前記選択部は、前記走路の曲率半径が閾値以上の場合、前記走路画像における車線の境界上の対応する2点であって、前記走路画像の上下方向の軸の座標が等しい2点を選択する
請求項1に記載の推定装置。
【請求項3】
前記選択部は、前記走路の曲率半径が閾値未満の場合、前記走路画像における車線の境界上の対応する2点の傾きが、前記曲率半径を前記撮影装置の高さで除算して得られる比率に応じた傾きの2点を選択する
請求項1に記載の推定装置。
【請求項4】
前記選択部は、前記走路を走行中のヨーレイトの絶対値が閾値以上の場合、前記走路画像における車線の境界上の対応する2点の傾きが、車速を前記撮影装置の高さとヨーレイトで除算して得られる比率に応じた傾きの2点を選択する
請求項1に記載の推定装置。
【請求項5】
第1の時点に撮影された前記走路画像から前記選択部により選択された2点のうちの何れかの点に対応する前記導出部により導出された第1の3次元座標と、前記車両に搭載されたセンサによる計測値とに基づいて、前記第1の時点よりも後の第2の時点の前記2点のうちの何れかの点に対応する第2の3次元座標を推定し、前記第2の時点における前記第1の3次元座標と前記第2の3次元座標との差に基づいて、前記2点のうちの何れかの点の走路画像上の座標の補正量を導出し、当該何れかの点の走路画像上の座標を、当該補正量を用いて補正する補正部を更に含み、
前記導出部は、前記補正部による補正後の2点の走路画像上の座標に基づいて、2点に対応する車線の境界の3次元座標及び車線の中心の3次元座標の少なくとも一方を導出する
請求項1から請求項4の何れか1項に記載の推定装置。
【請求項6】
車両に搭載された撮影装置により撮影された前記車両が走行する走路の画像である走路画像を取得し、
前記走路画像に基づいて車線の境界を抽出し、
前記走路画像における左右の車線の境界上の対応する2点の傾きが所定の条件を満たす2点を選択し、
選択した2点の前記走路画像上の座標に基づいて、選択した2点に対応する車線の境界の3次元座標及び車線の中心の3次元座標の少なくとも一方を導出する
処理をコンピュータが実行する推定方法。
【請求項7】
車両に搭載された撮影装置により撮影された前記車両が走行する走路の画像である走路画像を取得し、
前記走路画像に基づいて車線の境界を抽出し、
前記走路画像における左右の車線の境界上の対応する2点の傾きが所定の条件を満たす2点を選択し、
選択した2点の前記走路画像上の座標に基づいて、選択した2点に対応する車線の境界の3次元座標及び車線の中心の3次元座標の少なくとも一方を導出する
処理をコンピュータに実行させるための推定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、推定装置、推定方法、及び推定プログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、車両の前方の画像から左右の車線境界を抽出し、車線境界から消失線を決定し、消失線から車両の前方の位置におけるバンク角を算出する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-096427号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
運転支援システム及び自動走行システムでは、センサで検出した走行車線に沿って走行するように操舵制御を行う機能が求められており、操舵制御の目標値として走行車線前方の三次元座標が用いられる。特許文献1に記載の技術では、バンク角及び画像の奥行き方向の距離を推定することはできるが、走行車線前方の三次元座標を推定することはできない。また、特許文献1に記載の技術では、先行車及び側壁等で遠方の車線境界が隠蔽されることによって消失線が観測できないシーンではバンク角及び画像の奥行き方向の距離を推定することができない。
【0005】
本開示は、以上の事情を鑑みてなされたものであり、走行車線前方の三次元座標を精度良く推定することができる推定装置、推定方法、及び推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
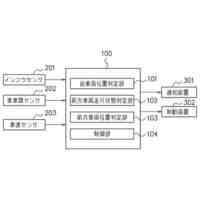
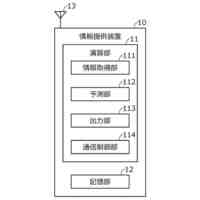
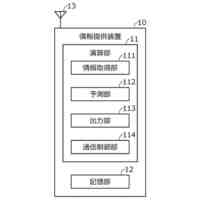
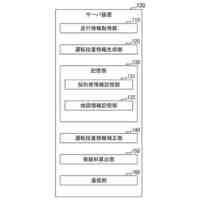
第1の態様の推定装置は、車両に搭載された撮影装置により撮影された前記車両が走行する走路の画像である走路画像を取得する取得部と、前記走路画像に基づいて車線の境界を抽出する抽出部と、前記走路画像における左右の車線の境界上の対応する2点の傾きが所定の条件を満たす2点を選択する選択部と、前記選択部により選択された2点の前記走路画像上の座標に基づいて、選択された2点に対応する車線の境界の3次元座標及び車線の中心の3次元座標の少なくとも一方を導出する導出部と、を含む。
【0007】
第1の態様の推定装置によれば、走行車線前方の三次元座標を精度良く推定することができる。
【0008】
第2の態様の推定装置は、第1の態様の推定装置において、前記選択部は、前記走路の曲率半径が閾値以上の場合、前記走路画像における車線の境界上の対応する2点であって、前記走路画像の上下方向の軸の座標が等しい2点を選択する。
【0009】
第2の態様の推定装置によれば、簡易な処理によって走行車線前方の三次元座標を精度良く推定することができる。
【0010】
第3の態様の推定装置は、第1の態様の推定装置において、前記選択部は、前記走路の曲率半径が閾値未満の場合、前記走路画像における車線の境界上の対応する2点の傾きが、前記曲率半径を前記撮影装置の高さで除算して得られる比率に応じた傾きの2点を選択する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精機株式会社
警報システム
17日前
日本精機株式会社
路面投影装置
2か月前
個人
自動電動車椅子
今日
エムケー精工株式会社
車両誘導装置
23日前
スズキ株式会社
運転支援装置
16日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
2か月前
個人
防犯に特化したアプリケーション
2か月前
ニッタン株式会社
検知器
10日前
ニッタン株式会社
検知器
8日前
ニッタン株式会社
検知器
8日前
株式会社国際電気
防災システム
20日前
ニッタン株式会社
発信機
1か月前
トヨタ自動車株式会社
車両
1か月前
TOA株式会社
拡声放送システム
2か月前
東京都公立大学法人
液滴検出装置
2か月前
日本信号株式会社
情報提供システム
2か月前
株式会社小糸製作所
移動体検出装置
10日前
株式会社アジラ
データ転送システム
2か月前
アズビル株式会社
建物管理システム
3か月前
個人
乗り物の移動を支援する方法及び装置
2か月前
株式会社JVCケンウッド
警報装置
2か月前
日本信号株式会社
信号情報システム
2か月前
株式会社小糸製作所
車両検出システム
10日前
個人
現示内容に関する情報放送機能付き信号機
1か月前
トヨタ自動車株式会社
回避動作判別装置
2か月前
日本信号株式会社
交通信号制御システム
2か月前
株式会社JVCケンウッド
情報処理装置
3か月前
能美防災株式会社
火災感知器
13日前
本田技研工業株式会社
情報提供装置
1か月前
ホーチキ株式会社
火災検出システム
2か月前
本田技研工業株式会社
情報提供装置
1か月前
本田技研工業株式会社
運転評価装置
1か月前
ヨシモトポール株式会社
接近報知システム
13日前
本田技研工業株式会社
物体検出装置
29日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ