TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025132896
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024030781
出願日
2024-02-29
発明の名称
実装システム、電子部品実装方法、制御装置、制御方法、及びプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
H01L
21/60 20060101AFI20250903BHJP(基本的電気素子)
要約
【課題】制御内容を簡素化できる実装システム、電子部品実装方法、制御装置、制御方法、及びプログラムを提供する。
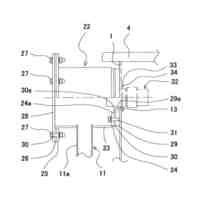
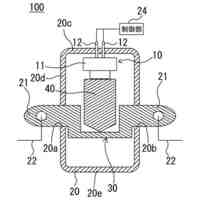
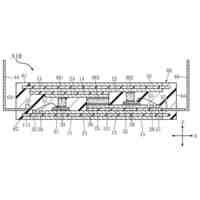
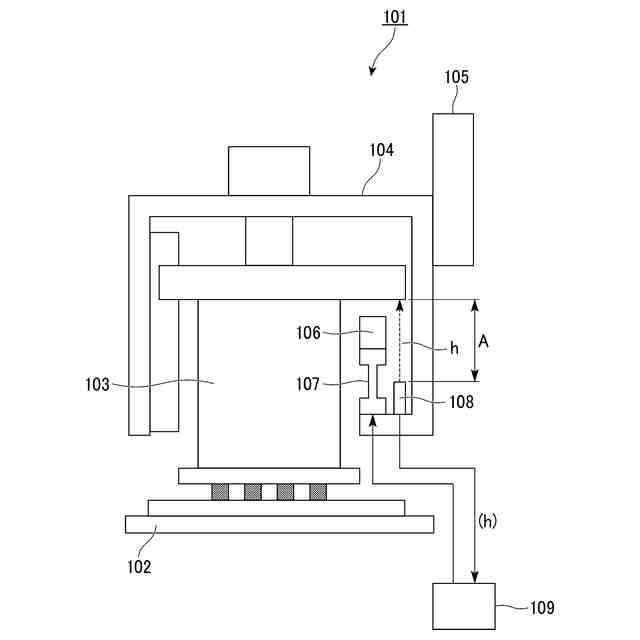
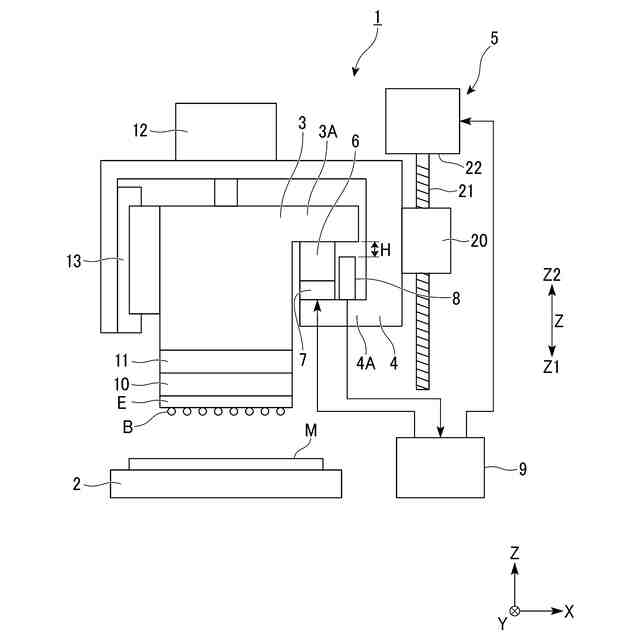
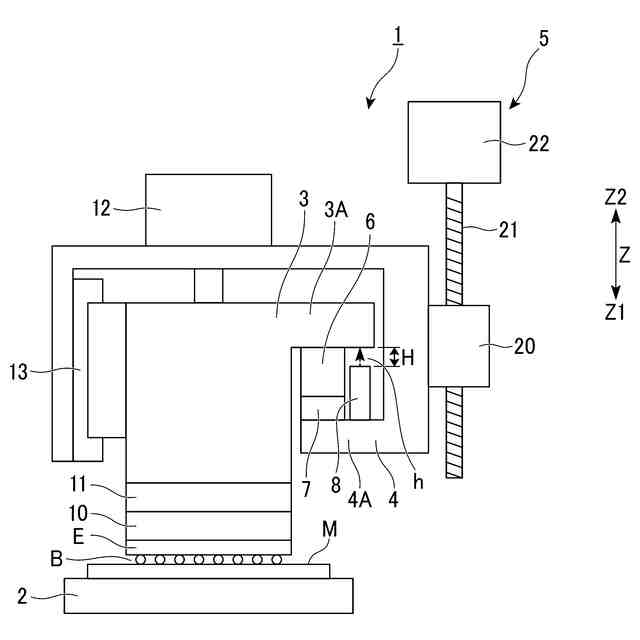
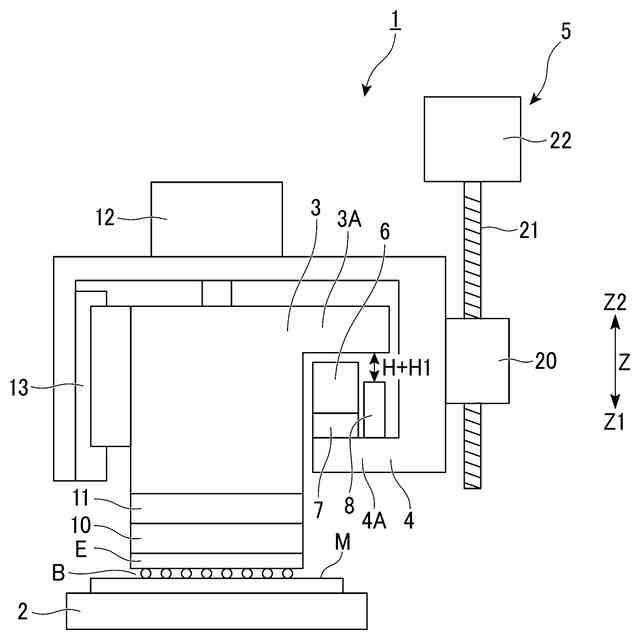
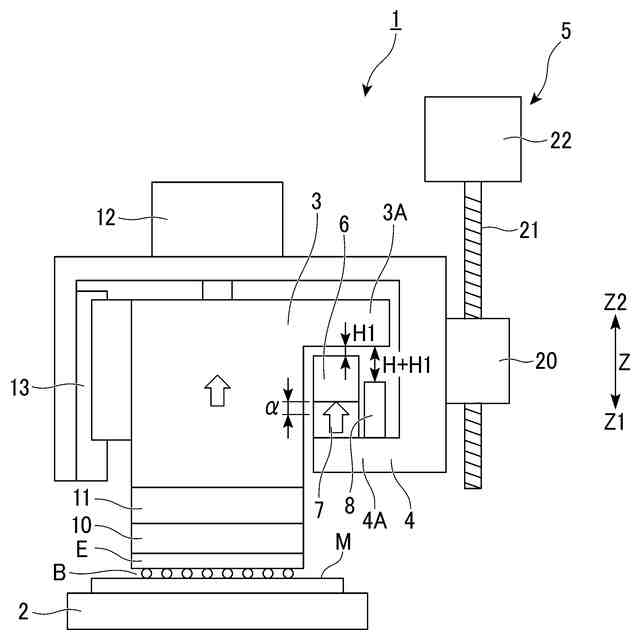
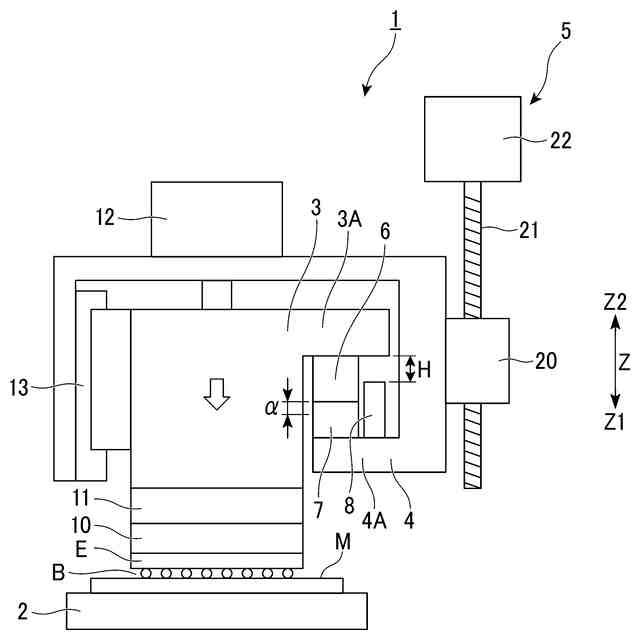
【解決手段】電子素子を把持し加熱する加圧ブロックと、加圧ブロックを基板ステージに対して昇降可能に支持する搭載ヘッドと、記搭載ヘッドを昇降させる搭載ヘッド移動機構と、搭載ヘッドに設けられて加圧ブロックの降下を停止させるメカニカルストッパと、メカニカルストッパの高さ位置を調整可能なメカニカルストッパ移動機構と、搭載ヘッドから加圧ブロックへの高さ距離を測定する距離センサと、測定した高さ距離が、予め設定した基準値よりも大きいことを条件として、メカニカルストッパ移動機構に対してメカニカルストッパの高さ位置調整を行わせる制御手段と、を備える。
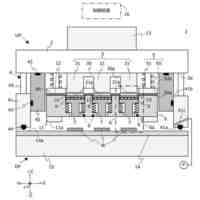
【選択図】図6
特許請求の範囲
【請求項1】
実装基板が載置された基板ステージと、
回路面に形成されたバンプを前記実装基板に向けた状態で電子素子を把持し加熱する加圧ブロックと、
前記加圧ブロックを前記基板ステージに対して昇降可能に支持する搭載ヘッドと、
前記搭載ヘッドを昇降させる搭載ヘッド移動機構と、
前記搭載ヘッドに設けられて前記加圧ブロックの降下を停止させるメカニカルストッパと、
前記メカニカルストッパの高さ位置を調整可能なメカニカルストッパ移動機構と、
前記搭載ヘッドから前記加圧ブロックへの高さ距離を測定する距離センサと、
測定した前記高さ距離が、予め設定した基準値よりも大きいことを条件として、前記メカニカルストッパ移動機構に対して前記メカニカルストッパの高さ位置調整を行わせる制御手段と、
を備える、
実装システム。
続きを表示(約 2,300 文字)
【請求項2】
前記電子素子を把持する把持手段と、
前記電子素子を加熱する加熱手段と、
前記実装基板に向かう方向に前記加圧ブロックに対し圧力を加えることができると共に、前記実装基板から離れる方向に前記加圧ブロックに対し圧力を加えることができる加圧手段と、を備える、
請求項1に記載の実装システム。
【請求項3】
前記加圧手段は、ボイスコイルモータを備える、
請求項2に記載の実装システム。
【請求項4】
前記メカニカルストッパ及び前記メカニカルストッパ移動機構は、前記加圧ブロックの水平方向に突出した水平段部と、前記搭載ヘッドの水平方向に突出した水平段部との間に配置される、
請求項1又は2に記載の実装システム。
【請求項5】
前記メカニカルストッパは、前記搭載ヘッドの水平段部に設置された前記メカニカルストッパ移動機構上に設けられる、
請求項4に記載の実装システム。
【請求項6】
前記距離センサは、前記加圧ブロックの水平段部と前記搭載ヘッドの水平段部との間に配置されて、前記加圧ブロックにおける水平段部の下面との距離を検出することで、前記加圧ブロックと前記搭載ヘッドとの高さ距離を測定する、
請求項4に記載の実装システム。
【請求項7】
実装基板が載置された基板ステージと、
回路面に形成されたバンプを前記実装基板に向けた状態で電子素子を把持し加熱する加圧ブロックと、
前記加圧ブロックを前記基板ステージに対して昇降可能に支持する搭載ヘッドと、
前記搭載ヘッドを昇降させる搭載ヘッド移動機構と、
前記搭載ヘッドに設けられて前記加圧ブロックの降下を停止させるメカニカルストッパと、
前記メカニカルストッパの高さ位置を調整可能なメカニカルストッパ移動機構と、
前記搭載ヘッドから前記加圧ブロックへの高さ距離を測定する距離センサと、
を備える、実装システムの前記加圧ブロックにより、回路面に形成されたバンプを実装基板に向けた状態で電子素子を把持しつつ加熱し、
前記加圧ブロックを前記実装基板に向かって移動させ、
前記加圧ブロックの高さ位置が、予め設定した基準値よりも大きいことを条件として、前記加圧ブロックの降下を停止させるためのメカニカルストッパの高さ位置を調整する、
電子部品実装方法。
【請求項8】
実装基板が載置された基板ステージと、
回路面に形成されたバンプを前記実装基板に向けた状態で電子素子を把持し加熱する加圧ブロックと、
前記加圧ブロックを前記基板ステージに対して昇降可能に支持する搭載ヘッドと、
前記搭載ヘッドを昇降させる搭載ヘッド移動機構と、
前記搭載ヘッドに設けられて前記加圧ブロックの降下を停止させるメカニカルストッパと、
前記メカニカルストッパの高さ位置を調整可能なメカニカルストッパ移動機構と、
前記搭載ヘッドから前記加圧ブロックへの高さ距離を測定する距離センサと、
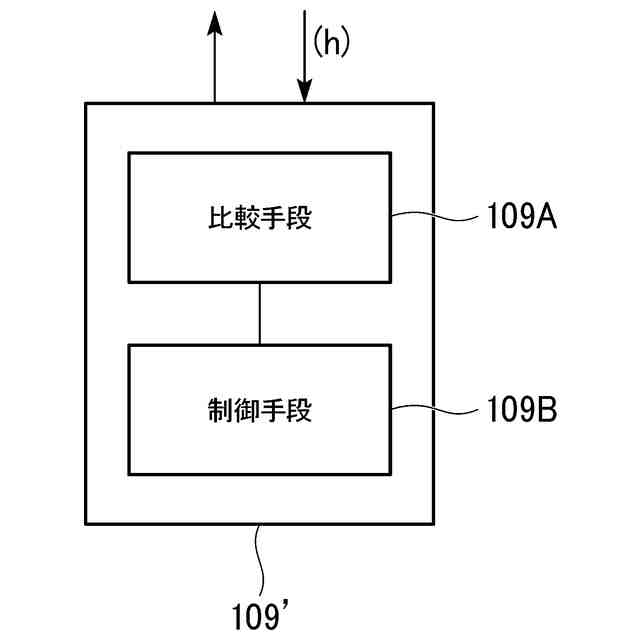
を備える、実装システムで測定された前記高さ距離と、予め設定した基準値と、の比較を行う比較手段と、
前記比較に基づき、測定した前記高さ距離が、前記基準値よりも大きいことを条件として、前記メカニカルストッパ移動機構に対して前記高さ位置の調整を行わせる制御手段と、
を備える、
制御装置。
【請求項9】
実装基板が載置された基板ステージと、
回路面に形成されたバンプを前記実装基板に向けた状態で電子素子を把持し加熱する加圧ブロックと、
前記加圧ブロックを前記基板ステージに対して昇降可能に支持する搭載ヘッドと、
前記搭載ヘッドを昇降させる搭載ヘッド移動機構と、
前記搭載ヘッドに設けられて前記加圧ブロックの降下を停止させるメカニカルストッパと、
前記メカニカルストッパの高さ位置を調整可能なメカニカルストッパ移動機構と、
前記搭載ヘッドから前記加圧ブロックへの高さ距離を測定する距離センサと、
を備える、実装システムで測定された前記高さ距離と、予め設定した基準値と、の比較を行い、
前記比較に基づき、測定した前記高さ距離が、前記基準値よりも大きいことを条件として、前記メカニカルストッパ移動機構に対して前記高さ位置の調整を行わせる、
制御方法。
【請求項10】
実装基板が載置された基板ステージと、
回路面に形成されたバンプを前記実装基板に向けた状態で電子素子を把持し加熱する加圧ブロックと、
前記加圧ブロックを前記基板ステージに対して昇降可能に支持する搭載ヘッドと、
前記搭載ヘッドを昇降させる搭載ヘッド移動機構と、
前記搭載ヘッドに設けられて前記加圧ブロックの降下を停止させるメカニカルストッパと、
前記メカニカルストッパの高さ位置を調整可能なメカニカルストッパ移動機構と、
前記搭載ヘッドから前記加圧ブロックへの高さ距離を測定する距離センサと、
を備える、実装システムで測定された前記高さ距離と、予め設定した基準値と、の比較を行い、
前記比較に基づき、測定した前記高さ距離が、前記基準値よりも大きいことを条件として、前記メカニカルストッパ移動機構に対して前記高さ位置の調整を行わせる、
ことをコンピュータに実行させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、実装システム、電子部品実装方法、制御装置、制御方法、及びプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
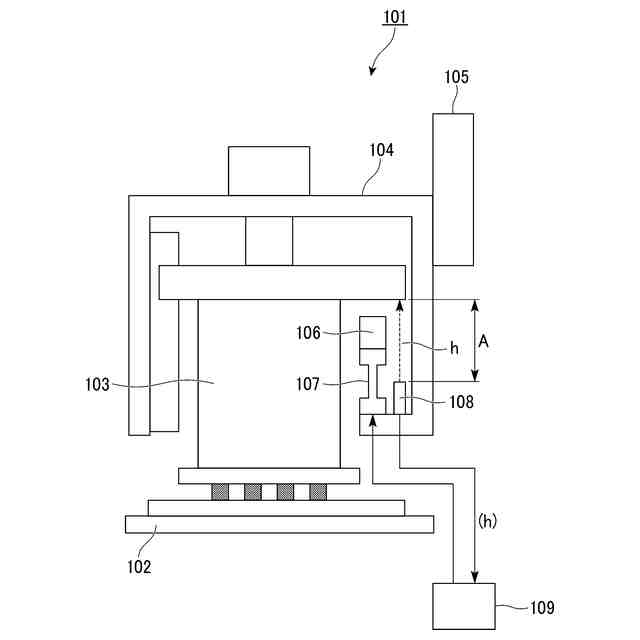
特許文献1には、電子部品を吸着保持するボンディングヘッドと、このボンディングヘッドを昇降させる昇降手段とを有し、電子部品を導電性のバンプを介して基板に加熱圧着するボンディング装置に関する技術が開示されている。
【0003】
また、このボンディング装置では、ボンディングヘッドに設けられたストッパと、ストッパと係合してボンディングヘッドの下降高さを規制するストッパ受け部と、ストッパ受け部をボンディングヘッドと独立して昇降させるストッパ受け部昇降手段とを有する。
そして、このボンディング装置では、ストッパとストッパ受け部との距離を検出する距離検出手段からの検出信号に基づき、ストッパとストッパ受け部との距離を一定距離に保つように当該ストッパ受け部の高さ位置を調整している。
【先行技術文献】
【特許文献】
【0004】
特開2011-151179号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載されたボンディング装置では、ストッパとストッパ受けとの距離を一定にするための複雑な制御を常時行っている。
このため、特許文献1に記載されたボンディング装置では、制御内容の簡素化が難しい。
【0006】
本開示の目的は、上述の課題を解決する実装システム、電子部品実装方法、制御装置、制御方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0007】
本開示の一態様に係る実装システムは、実装基板が載置された基板ステージと、回路面に形成されたバンプを前記実装基板に向けた状態で電子素子を把持し加熱する加圧ブロックと、前記加圧ブロックを前記基板ステージに対して昇降可能に支持する搭載ヘッドと、
前記搭載ヘッドを昇降させる搭載ヘッド移動機構と、前記搭載ヘッドに設けられて前記加圧ブロックの降下を停止させるメカニカルストッパと、前記メカニカルストッパの高さ位置を調整可能なメカニカルストッパ移動機構と、前記搭載ヘッドから前記加圧ブロックへの高さ距離を測定する距離センサと、測定した前記高さ距離が、予め設定した基準値よりも大きいことを条件として、前記メカニカルストッパ移動機構に対して前記メカニカルストッパの高さ位置調整を行わせる制御手段と、を備える。
【0008】
本開示の一態様に係る電子部品実装方法は、実装基板が載置された基板ステージと、
回路面に形成されたバンプを前記実装基板に向けた状態で電子素子を把持し加熱する加圧ブロックと、
前記加圧ブロックを前記基板ステージに対して昇降可能に支持する搭載ヘッドと、
前記搭載ヘッドを昇降させる搭載ヘッド移動機構と、
前記搭載ヘッドに設けられて前記加圧ブロックの降下を停止させるメカニカルストッパと、
前記メカニカルストッパの高さ位置を調整可能なメカニカルストッパ移動機構と、
前記搭載ヘッドから前記加圧ブロックへの高さ距離を測定する距離センサと、
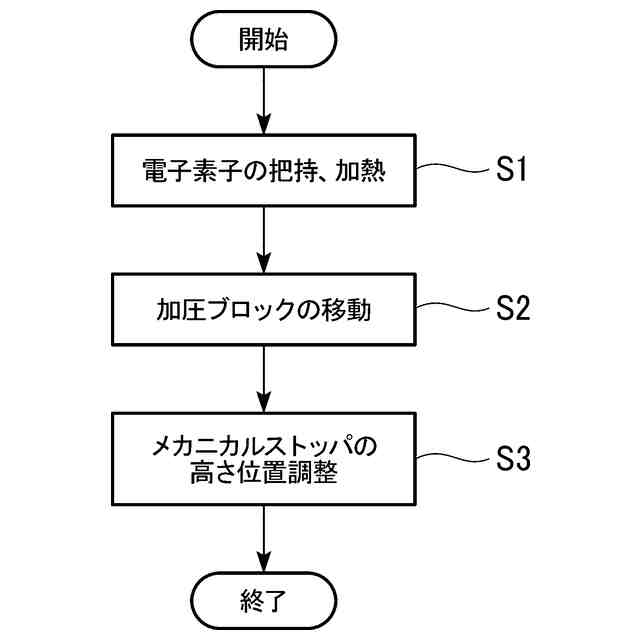
を備える、実装システムの前記加圧ブロックにより、回路面に形成されたバンプを実装基板に向けた状態で電子素子を把持しつつ加熱し、前記加圧ブロックを前記実装基板に向かって移動させ、前記加圧ブロックの高さ位置が、予め設定した基準値よりも大きいことを条件として、前記加圧ブロックの降下を停止させるためのメカニカルストッパの高さ位置を調整する。
【0009】
本開示の一態様に係る制御装置は、実装基板が載置された基板ステージと、回路面に形成されたバンプを前記実装基板に向けた状態で電子素子を把持し加熱する加圧ブロックと、
前記加圧ブロックを前記基板ステージに対して昇降可能に支持する搭載ヘッドと、前記搭載ヘッドを昇降させる搭載ヘッド移動機構と、前記搭載ヘッドに設けられて前記加圧ブロックの降下を停止させるメカニカルストッパと、前記メカニカルストッパの高さ位置を調整可能なメカニカルストッパ移動機構と、前記搭載ヘッドから前記加圧ブロックへの高さ距離を測定する距離センサと、を備える、実装システムで測定された前記高さ距離と、予め設定した基準値と、の比較を行う比較手段と、前記比較に基づき、測定した前記高さ距離が、前記基準値よりも大きいことを条件として、前記メカニカルストッパ移動機構に対して前記高さ位置の調整を行わせる制御手段と、を備える。
【0010】
本開示の一態様に係る制御方法は、実装基板が載置された基板ステージと、回路面に形成されたバンプを前記実装基板に向けた状態で電子素子を把持し加熱する加圧ブロックと、前記加圧ブロックを前記基板ステージに対して昇降可能に支持する搭載ヘッドと、前記搭載ヘッドを昇降させる搭載ヘッド移動機構と、前記搭載ヘッドに設けられて前記加圧ブロックの降下を停止させるメカニカルストッパと、前記メカニカルストッパの高さ位置を調整可能なメカニカルストッパ移動機構と、前記搭載ヘッドから前記加圧ブロックへの高さ距離を測定する距離センサと、を備える、実装システムで測定された前記高さ距離と、予め設定した基準値と、の比較を行い、前記比較に基づき、測定した前記高さ距離が、前記基準値よりも大きいことを条件として、前記メカニカルストッパ移動機構に対して前記高さ位置の調整を行わせる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
雄端子
1か月前
個人
後付地震遮断機
1か月前
個人
安全なNAS電池
6日前
個人
超精密位置決め機構
1か月前
愛知電機株式会社
電力機器
27日前
ヒロセ電機株式会社
端子
27日前
東レ株式会社
多孔質炭素シート
1日前
日機装株式会社
加圧装置
22日前
個人
フリー型プラグ安全カバー
13日前
ローム株式会社
半導体装置
22日前
ローム株式会社
半導体装置
1日前
エイブリック株式会社
半導体装置
3日前
エイブリック株式会社
半導体装置
3日前
キヤノン株式会社
電子機器
1日前
住友電装株式会社
端子
29日前
株式会社GSユアサ
蓄電装置
17日前
オムロン株式会社
電磁継電器
10日前
東レ株式会社
ガス拡散層の製造方法
1日前
三菱電機株式会社
回路遮断器
23日前
株式会社GSユアサ
蓄電装置
17日前
沖電気工業株式会社
アンテナ
13日前
株式会社GSユアサ
蓄電装置
9日前
株式会社カネカ
二次電池
16日前
日本化薬株式会社
電流遮断装置
1か月前
トヨタ自動車株式会社
蓄電装置
20日前
日本特殊陶業株式会社
保持装置
8日前
株式会社ヨコオ
コネクタ
3日前
ローム株式会社
半導体装置
17日前
愛知電機株式会社
負荷時タップ切換装置
17日前
日新イオン機器株式会社
イオン注入装置
22日前
三菱自動車工業株式会社
放熱構造
22日前
ローム株式会社
半導体装置
2日前
住友電装株式会社
コネクタ
29日前
ローム株式会社
半導体装置
10日前
トヨタ自動車株式会社
電池管理装置
10日前
日本航空電子工業株式会社
コネクタ
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ