TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129537
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026232
出願日
2024-02-26
発明の名称
車両の制御装置、制御方法及び、プログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/10 20060101AFI20250829BHJP(車両一般)
要約
【課題】車両の横位置が目標軌道からずれた場合においても円滑な車線変更を実現する。
【解決手段】車両を設定した目標軌道に沿って走行させることにより、車両を走行中の車線から目標車線に自動的に車線変更させる車線変更制御を実施する車両の制御装置であって、車線変更制御の実行中に車両の運転者の操舵操作により車両の横位置が目標軌道からずれた場合には、目標軌道の目標横位置が車両の現在の横位置に近づくように、目標軌道を前方又は後方に移動させる補正処理を実施する補正処理部を備える。
【選択図】図4
特許請求の範囲
【請求項1】
車両を設定した目標軌道に沿って走行させることにより、前記車両を走行中の車線から該車線に隣接する目標車線に自動的に車線変更させる車線変更制御を実施する車両の制御装置であって、
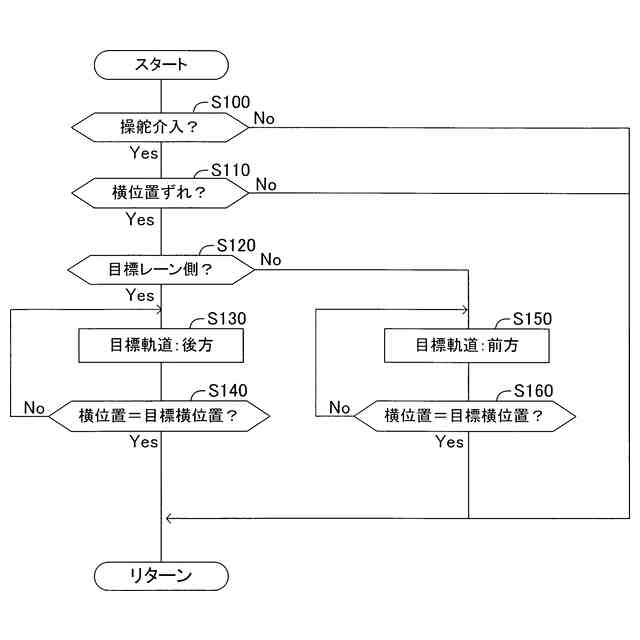
前記車線変更制御の実行中に前記車両の運転者の操舵操作により前記車両の横位置が前記目標軌道からずれた場合には、前記目標軌道の目標横位置が前記車両の現在の横位置に近づくように、前記目標軌道を前方又は後方に移動させる補正処理を実施する補正処理部を備える
車両の制御装置。
続きを表示(約 780 文字)
【請求項2】
請求項1に記載の車両の制御装置であって、
前記補正処理部は、前記補正処理を実施する際に、前記目標軌道に対する前記車両の横位置のずれ量に応じて、前記目標軌道を前方又は後方に移動させる移動量を変更する
車両の制御装置。
【請求項3】
請求項1又は2に記載の車両の制御装置であって、
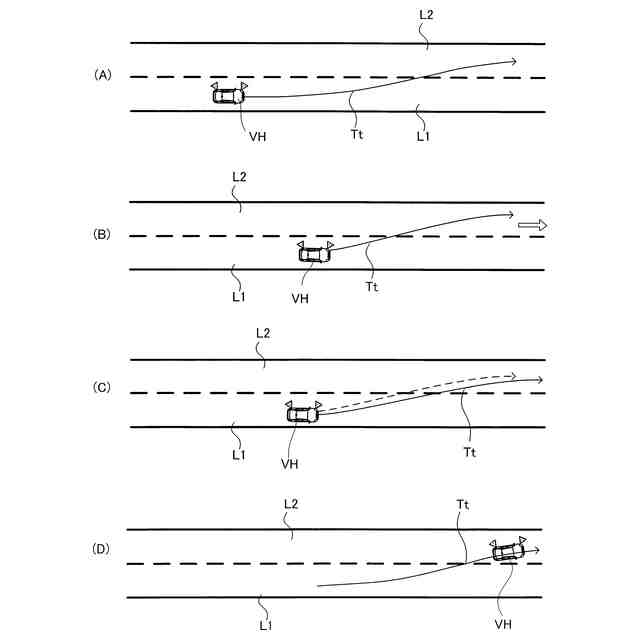
前記補正処理部は、前記補正処理を実施する際に、前記車両の横位置が前記目標軌道から前記目標車線側にずれている場合には、前記目標軌道を後方に移動させ、前記車両の横位置が前記目標軌道から前記目標車線とは反対側にずれている場合には、前記目標軌道を前方に移動させる
車両の制御装置。
【請求項4】
車両を設定した目標軌道に沿って走行させることにより、前記車両を走行中の車線から該車線に隣接する目標車線に自動的に車線変更させる車線変更制御を実施する車両の制御方法であって、
前記車線変更制御の実行中に前記車両の運転者の操舵操作により前記車両の横位置が前記目標軌道からずれた場合には、前記目標軌道の目標横位置が前記車両の現在の横位置に近づくように、前記目標軌道を前方又は後方に移動させる補正処理を実施する
車両の制御方法。
【請求項5】
車両を設定した目標軌道に沿って走行させることにより、前記車両を走行中の車線から該車線に隣接する目標車線に自動的に車線変更させる車線変更制御を実施する車両の制御装置のコンピュータに、
前記車線変更制御の実行中に前記車両の運転者の操舵操作により前記車両の横位置が前記目標軌道からずれた場合には、前記目標軌道の目標横位置が前記車両の現在の横位置に近づくように、前記目標軌道を前方又は後方に移動させる補正処理を実施させる
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の制御装置、制御方法及び、プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
車両を走行中の車線から隣接する目標車線に自動的に車線変更させる車線変更制御(Lane Change Assist:以下、LCA)を実施する車両の制御装置が知られている。例えば、特許文献1には、LCAの実行中に、LCAの操舵方向と同方向の操舵介入がドライバにより行われた状態において、停止条件が成立しない場合には、LCAを継続し、停止条件が成立する場合には、ドライバにLCAの終了を通知する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-92538号公報
【発明の概要】
【0004】
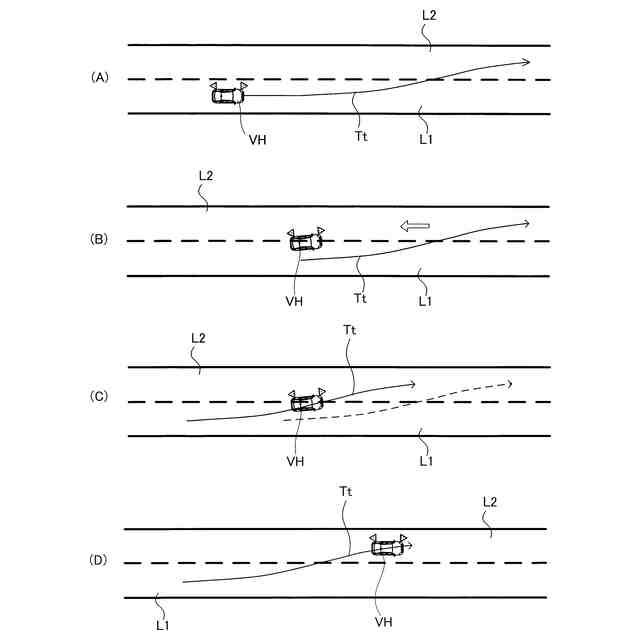
LCAの実行中に、ドライバの操舵介入によって車両の横位置がLCAの目標軌道(目標横位置)からずれると、制御装置は、車両にドライバの操舵操作とは逆方向の操舵トルクを付与することにより、車両の横位置を目標軌道に戻そうとする。このため、ドライバの操舵操作にけんか感(ドライバに操舵入力とは逆向きの操舵トルクが伝わること)が生じたり、或は、車両の車線変更に伴う挙動がドライバのフィーリングとは異なる挙動になったりすることで、ドライバに違和感や煩わしさを与える課題がある。
【0005】
本開示の技術は、上記課題を解決するためになされたものであり、車両の横位置がLCAの目標軌道からずれた場合においても、円滑な車線変更を実現することを目的とする。
【0006】
本開示の装置は、
車両を設定した目標軌道に沿って走行させることにより、前記車両を走行中の車線から該車線に隣接する目標車線に自動的に車線変更させる車線変更制御を実施する車両の制御装置であって、
前記車線変更制御の実行中に前記車両の運転者の操舵操作により前記車両の横位置が前記目標軌道からずれた場合には、前記目標軌道の目標横位置が前記車両の現在の横位置に近づくように、前記目標軌道を前方又は後方に移動させる補正処理を実施する補正処理部を備える。
【0007】
本開示の方法は、
車両を設定した目標軌道に沿って走行させることにより、前記車両を走行中の車線から該車線に隣接する目標車線に自動的に車線変更させる車線変更制御を実施する車両の制御方法であって、
前記車線変更制御の実行中に前記車両の運転者の操舵操作により前記車両の横位置が前記目標軌道からずれた場合には、前記目標軌道の目標横位置が前記車両の現在の横位置に近づくように、前記目標軌道を前方又は後方に移動させる補正処理を実施する。
【0008】
本開示のプログラムは、
車両を設定した目標軌道に沿って走行させることにより、前記車両を走行中の車線から該車線に隣接する目標車線に自動的に車線変更させる車線変更制御を実施する車両の制御装置のコンピュータに、
前記車線変更制御の実行中に前記車両の運転者の操舵操作により前記車両の横位置が前記目標軌道からずれた場合には、前記目標軌道の目標横位置が前記車両の現在の横位置に近づくように、前記目標軌道を前方又は後方に移動させる補正処理を実施させる。
【図面の簡単な説明】
【0009】
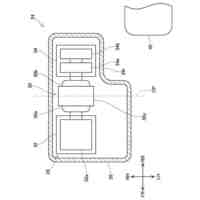
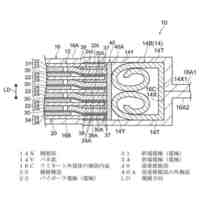
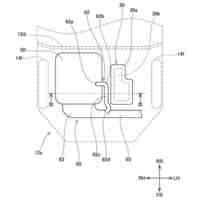
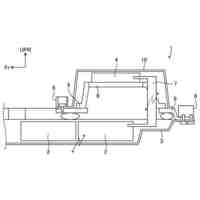
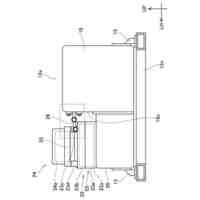
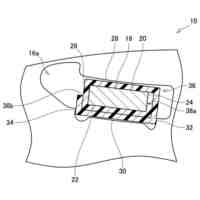
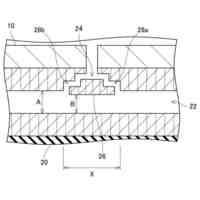
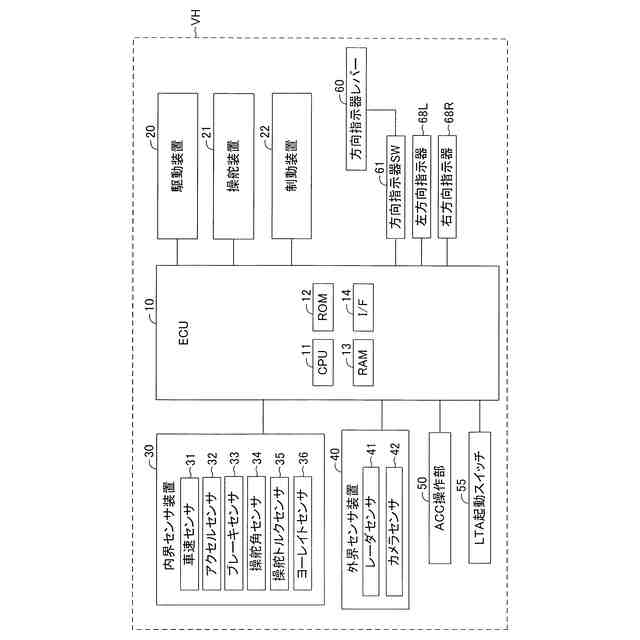
本実施形態に係る車両のハードウェア構成を示す模式図である。
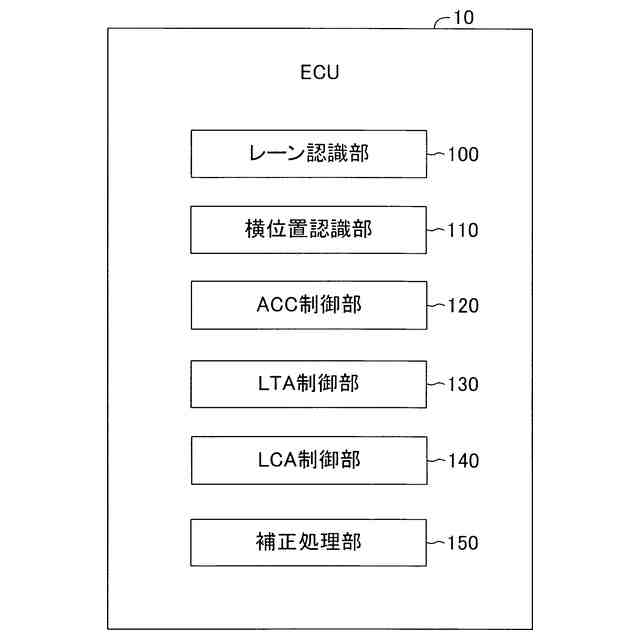
本実施形態に係る制御装置のソフトウェア構成を示す模式図である。
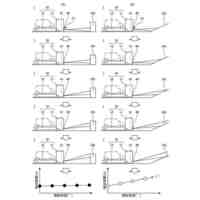
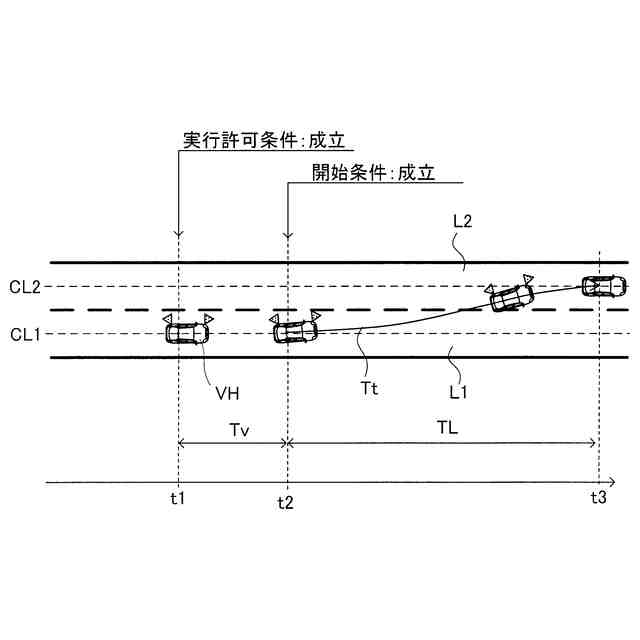
LCAの目標軌道の一例を説明する模式図である。
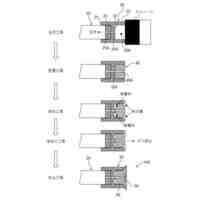
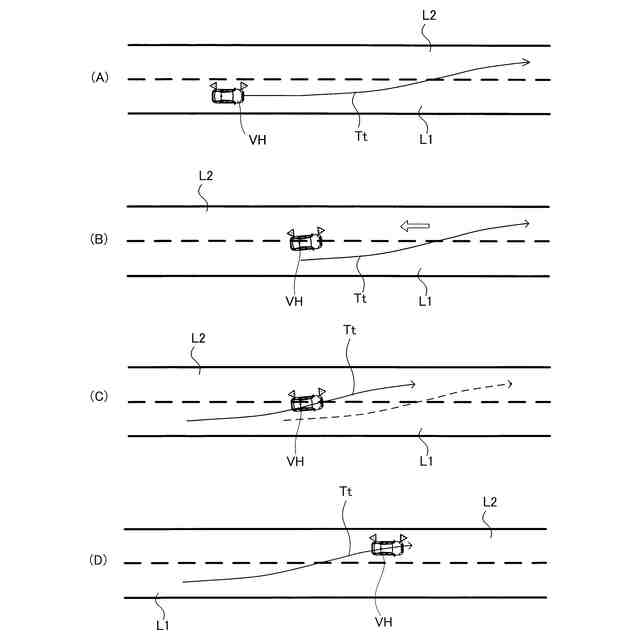
本実施形態に係る制御装置が実施する補正処理を説明する模式図である。
本実施形態に係る制御装置が実施する補正処理を説明する模式図である。
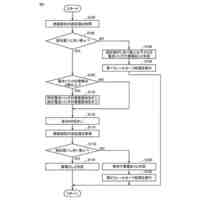
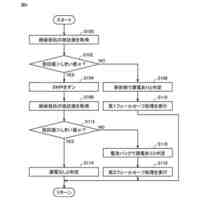
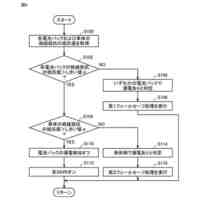
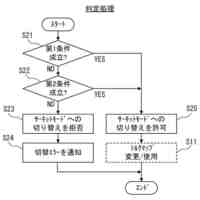
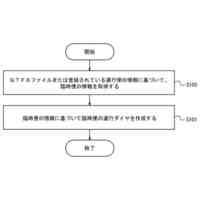
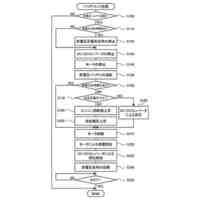
本実施形態に係る制御装置が実施する補正処理のルーチンを説明するフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して本実施形態に係る車両の制御装置、制御方法及び、プログラムを説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
電池
18日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
電池
29日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
方法
8日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
電池
25日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
モータ
25日前
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
減圧弁
1か月前
トヨタ自動車株式会社
モータ
24日前
トヨタ自動車株式会社
モータ
15日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
自動車
1か月前
トヨタ自動車株式会社
ロータ
1か月前
トヨタ自動車株式会社
光電極
1か月前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
ロータ
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ