TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025125683
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021777
出願日
2024-02-16
発明の名称
無人飛行体制御システムおよび無人飛行体制御方法
出願人
三菱電機株式会社
代理人
個人
,
個人
主分類
G05D
1/49 20240101AFI20250821BHJP(制御;調整)
要約
【課題】本開示は、無人飛行体の経路逸脱を抑制することを目的とする。
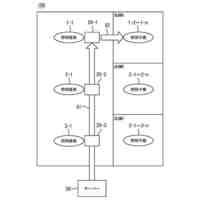
【解決手段】無人飛行体101の飛行を制御する無人飛行体制御システム1001は、無人飛行体101の飛行経路を生成する経路生成部212と、飛行経路を構成する複数の飛行区間の夫々に対し、予め用意された無人飛行体101の複数の姿勢制御モードから1つの姿勢制御モードを割り当てる姿勢制御モード生成部213と、割り当てられた姿勢制御モードに従い無人飛行体101の姿勢を制御し、無人飛行体101に飛行経路を飛行させる姿勢制御部124と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
無人飛行体の飛行を制御する無人飛行体制御システムであって、
前記無人飛行体の飛行経路を生成する経路生成部と、
前記飛行経路を構成する複数の飛行区間の夫々に対し、予め用意された前記無人飛行体の複数の姿勢制御モードから1つの姿勢制御モードを割り当てる姿勢制御モード生成部と、
割り当てられた前記姿勢制御モードに従い前記無人飛行体の姿勢を制御し、前記無人飛行体に前記飛行経路を飛行させる姿勢制御部と、を備える、
無人飛行体制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記姿勢制御モードは、
前記無人飛行体が姿勢を保持したまま飛行する姿勢保持モードと、
前記無人飛行体が姿勢の保持より加減速を優先する加減速優先モードと、
を含む、
請求項1に記載の無人飛行体制御システム。
【請求項3】
前記無人飛行体は、
本体と、
前記本体の外周から互いに異なる方向に突出する複数のプロペラ軸と、
前記複数のプロペラ軸の夫々に搭載された複数のプロペラと、
を備え、
前記複数のプロペラ軸の夫々は予め定められた方向の回転軸を有し、
前記姿勢保持モードは、前記複数のプロペラ軸の夫々の前記回転軸周りの回転角度の保持または可変のパターンを含む、
請求項2に記載の無人飛行体制御システム。
【請求項4】
前記無人飛行体に搭載され、前記無人飛行体が前記姿勢保持モードで飛行している場合に、前記無人飛行体の前記飛行経路からの逸脱状況または前記無人飛行体の周辺の障害物の状況に応じて、前記無人飛行体の前記姿勢制御モードを前記加減速優先モードに変更する緊急モード判定部を備える、
請求項2に記載の無人飛行体制御システム。
【請求項5】
前記姿勢制御モード生成部は、前記緊急モード判定部による前記無人飛行体の前記姿勢制御モードの前記加減速優先モードへの変更履歴を取得し、前記変更履歴に基づき前記姿勢制御モードを再決定する、
請求項4に記載の無人飛行体制御システム。
【請求項6】
前記経路生成部および前記姿勢制御モード生成部は、前記無人飛行体の外部の管制システムに設けられる、
請求項1に記載の無人飛行体制御システム。
【請求項7】
前記姿勢制御モード生成部は、前記無人飛行体の飛行特性の異方性に基づき前記姿勢制御モードを決定する、
請求項1に記載の無人飛行体制御システム。
【請求項8】
前記無人飛行体に対する外乱を計測または予測する外乱測定部を備え、
前記姿勢制御モード生成部は、前記外乱に基づき前記姿勢制御モードを決定する、
請求項1に記載の無人飛行体制御システム。
【請求項9】
前記姿勢制御モード生成部は、前記無人飛行体の飛行中の重量または重心位置の変化に基づき、前記姿勢制御モードを更新する、
請求項1に記載の無人飛行体制御システム。
【請求項10】
無人飛行体の飛行を制御する無人飛行体制御方法であって、
前記無人飛行体の飛行経路を生成し、
複数の飛行区間からなる前記飛行経路の各前記飛行区間ごとに、前記無人飛行体の姿勢制御モードを決定し、
前記姿勢制御モードに従い、前記無人飛行体の姿勢を制御し、前記無人飛行体に前記飛行経路を飛行させる、
無人飛行体制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、無人飛行体の制御に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、トンネルまたは橋梁などのインフラ構造物の点検に、無人飛行体による撮影または測定が活用されている。無人飛行体が点検対象物の範囲などを計測しながら所定の範囲を自律飛行することにより、点検の省力化が実現する(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2016-225863号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
鳥などの動的障害物が突然現れたり、無人飛行体が障害物に近距離まで近づいて初めてセンサーがその障害物を検知したりした場合、無人飛行体はそれらの障害物との衝突を避けるため、緊急停止または回避経路での飛行を行う必要がある。こうした外乱の発生時に限らず、無人飛行体が経路を逸脱すると、点検対象物を適切に点検することが出来なくなるため、望ましくない。
【0005】
本開示は上記の問題点に鑑みてなされたものであり、無人飛行体の経路逸脱を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本開示の無人飛行体制御システムは、無人飛行体の飛行を制御する無人飛行体制御システムであって、無人飛行体の飛行経路を生成する経路生成部と、飛行経路を構成する複数の飛行区間の夫々に対し、予め用意された無人飛行体の複数の姿勢制御モードから1つの姿勢制御モードを割り当てる姿勢制御モード生成部と、割り当てられた姿勢制御モードに従い無人飛行体の姿勢を制御し、無人飛行体に飛行経路を飛行させる姿勢制御部と、を備える。
【発明の効果】
【0007】
本開示の無人飛行体制御システムは、飛行区間ごとに定めた姿勢制御モードで無人飛行体の姿勢を制御し飛行させるため、飛行区間ごとに適切な姿勢制御が行われ、無人飛行体の経路逸脱が抑制される。
【図面の簡単な説明】
【0008】
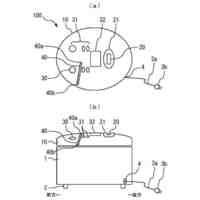
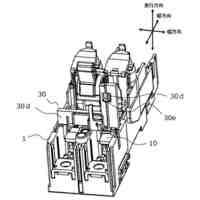
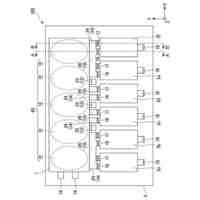
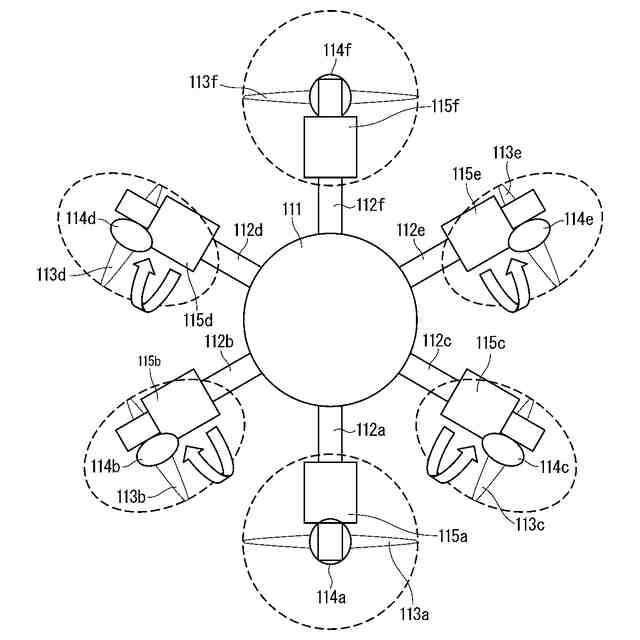
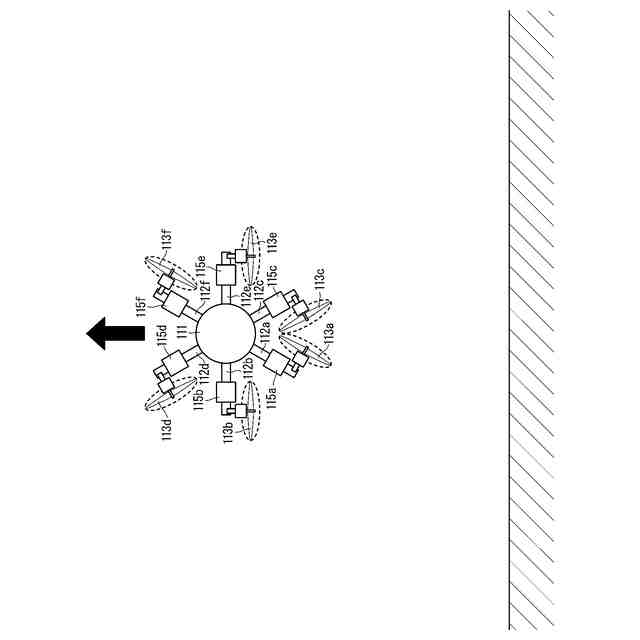
実施の形態1に係る無人飛行体の上面図である。
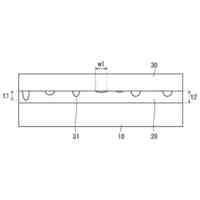
実施の形態1に係る無人飛行体の側面図である。
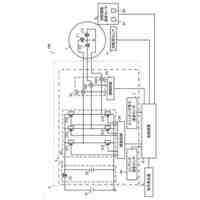
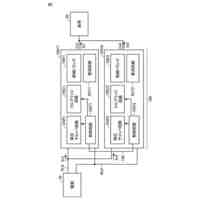
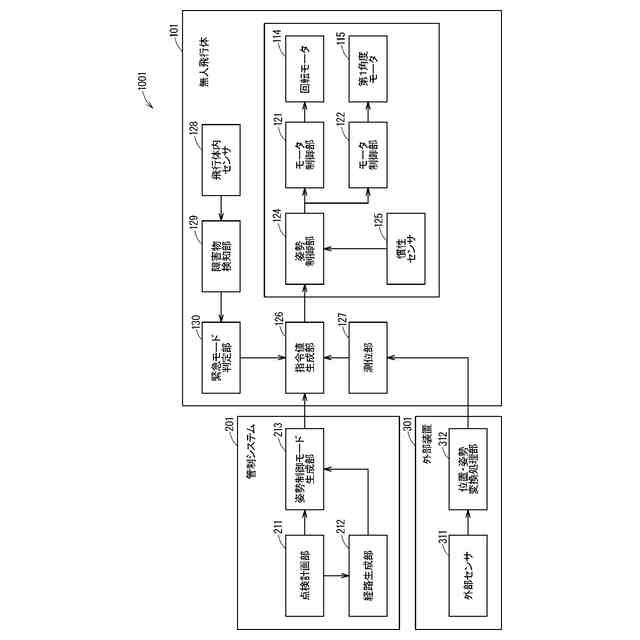
実施の形態1に係る無人飛行体制御システムの構成図である。
実施の形態1に係る無人飛行体が4つのプロペラにより進行方向の推力を得る場合の上面図である。
実施の形態1に係る無人飛行体が2つのプロペラにより進行方向の推力を得る場合の上面図である。
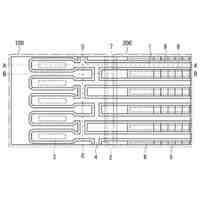
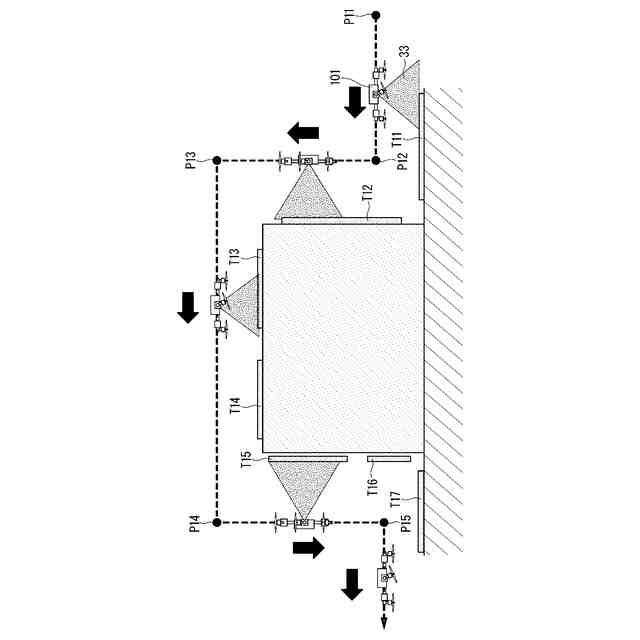
点検経路の第1例を示す上面図である。
点検経路の第1例を示す側面図である。
実施の形態1に係る無人飛行体が垂直姿勢で上昇する場合の側面図である。
点検経路の第2例を示す上面図である。
点検経路の第2例を示す側面図である。
実施の形態1に係る無人飛行体が垂直姿勢で水平方向に移動する場合の側面図である。
点検経路の第3例を示す側面図である。
実施の形態1に係る無人飛行体が地面に接近する状態を示す側面図である。
実施の形態1に係る無人飛行体が姿勢保持モードで経路を保持できなくなった様子を示す側面図である。
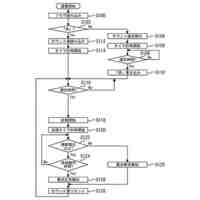
実施の形態1に係る無人飛行体の、姿勢保持モードの飛行における動作を示すフローチャートである。
実施の形態1に係る無人飛行体が姿勢保持モードでの飛行中に、障害物が急に現れた様子を示す側面図である。
実施の形態2に係る無人飛行体制御システムの構成図である。
実施の形態3に係る無人飛行体の上面図である。
実施の形態3に係る無人飛行体の側面図である。
実施の形態3に係る無人飛行体制御システムの構成図である。
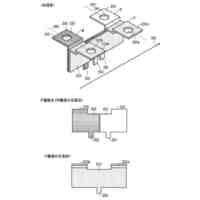
補修経路の例を示す上面図である。
補修経路の例を示す側面図である。
実施の形態3に係る無人飛行体が噴射の反力を相殺する推力を2つのプロペラで得る様子を示す側面図である。
実施の形態3に係る無人飛行体が水平方向に移動する推力を2つのプロペラで得る様子を示す側面図である。
実施の形態3に係る無人飛行体が重心位置J1である場合に地表面に噴射する様子を示す側面図である。
実施の形態3に係る無人飛行体が重心位置J2である場合に地表面に噴射する様子を示す側面図である。
実施の形態3に係る無人飛行体の、姿勢保持モードの飛行における動作を示すフローチャートである。
無人飛行体の機能ブロックを実現するハードウェア構成を示す図である。
無人飛行体の機能ブロックを実現するハードウェア構成を示す図である。
【発明を実施するための形態】
【0009】
<A.実施の形態1>
図1は、実施の形態1に係る無人飛行体101の上面図である。図1に示されるように、無人飛行体101は、本体111、6つのプロペラ軸112a,112b,112c,112d,112e,112f、6つのプロペラ113a,113b,113c,113d,113e,113f、6つの回転モータ114a,114b,114c,114d,114e,114f、および6つの第1角度モータ115a,115b,115c,115d,115e,115fを備える。
【0010】
なお、本明細書において、プロペラ軸112a,112b,112c,112d,112e,112fを個別に区別しない場合には、プロペラ軸112と称する。また、このことは、他の構成要素についても同様であり、プロペラ113、回転モータ114、第1角度モータ115などとも称する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
計測器
28日前
三菱電機株式会社
冷蔵庫
21日前
三菱電機株式会社
照明装置
28日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
回転電機
6日前
三菱電機株式会社
照明装置
22日前
三菱電機株式会社
照明器具
9日前
三菱電機株式会社
照明装置
3日前
三菱電機株式会社
換気装置
9日前
三菱電機株式会社
電子機器
20日前
三菱電機株式会社
照明装置
24日前
三菱電機株式会社
回転電機
14日前
三菱電機株式会社
回転電機
10日前
三菱電機株式会社
照明器具
16日前
三菱電機株式会社
半導体装置
9日前
三菱電機株式会社
半導体装置
20日前
三菱電機株式会社
回路遮断器
23日前
三菱電機株式会社
加熱調理器
29日前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
半導体装置
20日前
三菱電機株式会社
半導体装置
9日前
三菱電機株式会社
半導体装置
2日前
三菱電機株式会社
電気掃除機
14日前
三菱電機株式会社
回路遮断器
13日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
空気処理装置
21日前
三菱電機株式会社
電力変換装置
24日前
三菱電機株式会社
埋込プレート
22日前
三菱電機株式会社
制御システム
29日前
三菱電機株式会社
回転電機装置
6日前
三菱電機株式会社
信号切替装置
29日前
三菱電機株式会社
電力変換装置
2日前
三菱電機株式会社
電源システム
20日前
三菱電機株式会社
梱包チューブ
1か月前
三菱電機株式会社
給湯機システム
6日前
三菱電機株式会社
屋外設置用筐体
2日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ