TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123615
公報種別
公開特許公報(A)
公開日
2025-08-25
出願番号
2024019142
出願日
2024-02-13
発明の名称
制御装置、制御方法、及びプログラム
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05B
13/02 20060101AFI20250818BHJP(制御;調整)
要約
【課題】様々な状況を考慮して、適切な制御信号を与えることができる制御装置、制御方法、及びプログラムを提供すること。
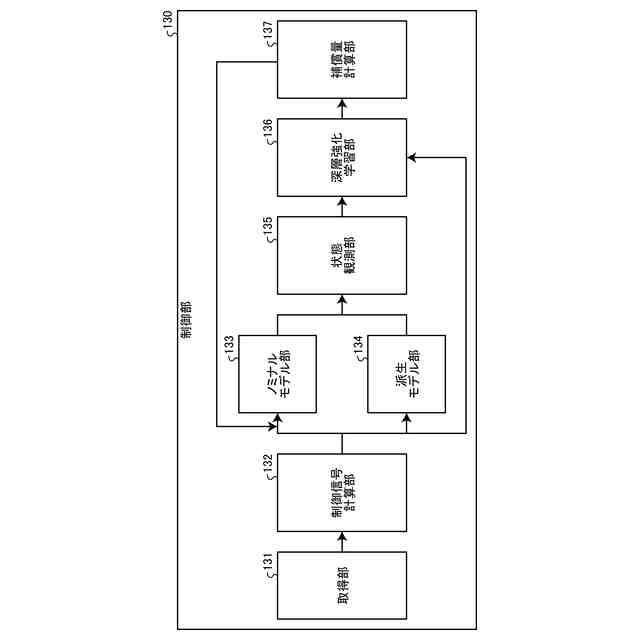
【解決手段】本開示に係る制御装置は、制御対象の制御パラメータについての制御目標値を取得する取得部と、制御目標値に基づいて、制御対象に与える制御信号を計算する制御信号計算部と、制御信号をノミナルモデルに与えた場合の出力値と、制御信号を派生モデルに与えた場合の出力値と、を観測する状態観測部と、状態観測部の観測した状態と、状態に応じた報酬に基づいて、制御信号を補償する適切な補償量を計算する補償量計算モデルについて、深層強化学習を実行させる深層強化学習部と、を備える。
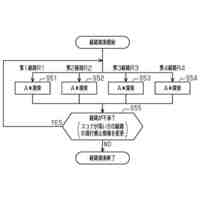
【選択図】図3
特許請求の範囲
【請求項1】
制御対象の制御パラメータについての制御目標値を取得する取得部と、
前記制御目標値に基づいて、制御対象に与える制御信号を計算する制御信号計算部と、
前記制御信号をノミナルモデルに与えた場合の出力値と、前記制御信号を派生モデルに与えた場合の出力値と、を含む要素により表される状態を観測する状態観測部と、
前記状態観測部の観測した状態と、前記状態に応じた報酬に基づいて、前記制御信号を補償する適切な補償量を計算する補償量計算モデルについて、深層強化学習を実行させる深層強化学習部と、を備える、
制御装置。
続きを表示(約 990 文字)
【請求項2】
前記深層強化学習部によって学習させられた補償量計算モデルを用いて、前記制御信号を補償する補償量を計算する補償量計算部と、をさらに備える、
請求項1に記載の制御装置。
【請求項3】
前記補償量計算部が計算する前記制御信号を補償する補償量には、上限値と下限値が設定されている、
請求項2に記載の制御装置。
【請求項4】
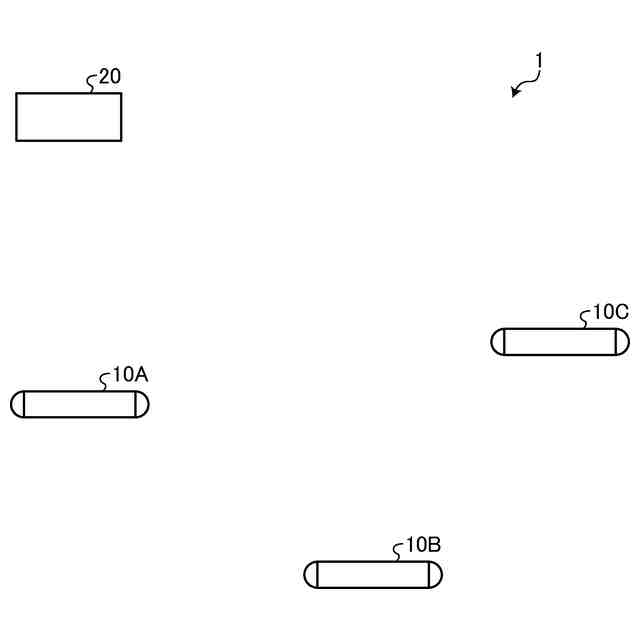
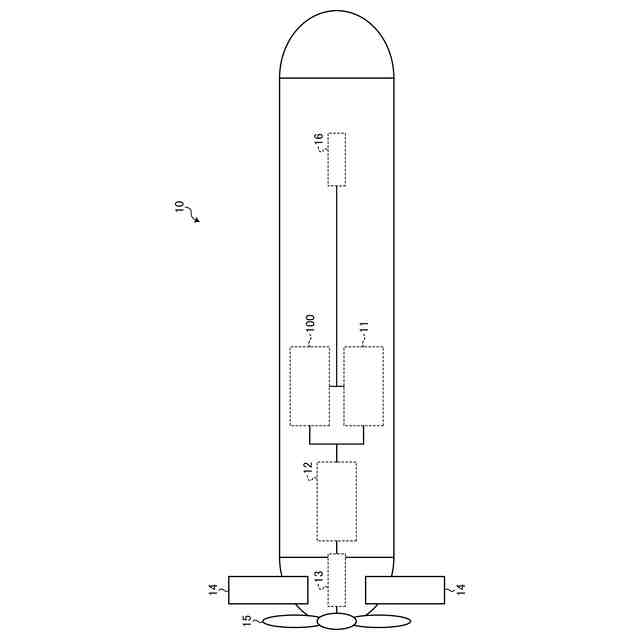
前記制御対象は、無人水中航走体であって、
前記制御パラメータは、操舵量であり、
前記補償量計算部が計算する補償量の上限値は、制御モデルの制御信号のプラス10パーセント、前記補償量の下限値は、マイナス10パーセントである、
請求項2又は3に記載の制御装置。
【請求項5】
前記派生モデルにおける無人水中航走体の抗力係数の値が、前記ノミナルモデルにおける無人水中航走体の抗力係数の値に対して、所定の値だけ増加又は減少された値が用いられている、
請求項4に記載の制御装置。
【請求項6】
制御対象の制御パラメータについての制御目標値を取得するステップと、
前記制御目標値に基づいて、制御対象に与える制御信号を計算するステップと、
前記制御信号をノミナルモデルに与えた場合の出力値と、前記制御信号を派生モデルに与えた場合の出力値と、を含む要素により表される状態を観測するステップと、
観測した状態と、前記状態に応じた報酬に基づいて、前記制御信号を補償する適切な補償量を計算する補償量計算モデルについて、深層強化学習を実行させるステップと、を含む、
制御方法。
【請求項7】
制御対象の制御パラメータについての制御目標値を取得するステップと、
前記制御目標値に基づいて、制御対象に与える制御信号を計算するステップと、
前記制御信号をノミナルモデルに与えた場合の出力値と、前記制御信号を派生モデルに与えた場合の出力値と、を含む要素により表される状態を観測するステップと、
観測した状態と、前記状態に応じた報酬に基づいて、前記制御信号を補償する適切な補償量を計算する補償量計算モデルについて、深層強化学習を実行させるステップと、をコンピュータに実行させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、制御方法、及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
無人水中航走体(UUV:Unmanned Underwater Vehicle)や、遠隔操作型無人潜水機(ROV:Remoted Operated Vehicle)、無人航空機(UAV:Unmanned Aerial Vehicle)、無人地上車両(UGV:Unmanned Ground Vehicle)等の無人機の自律制御に機械学習技術の適用が進んでいる。
【0003】
例えば、下記の特許文献1には、ドライバーロボット、車両、ドライバーロボット制御からなる車両試験設備であって、走行計測データから、制御対象の車両、ドライバーロボット、制御(操作推論)の全てを学習して、自動的にドライバーロボットが車両を操作できるようにするものが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-48416号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記の特許文献1に記載の制御対象のモデルの生成に機械学習を用いるためには、余計に多くのデータを要するといった問題があった。また、無人機の制御に機械学習の技術を用いる場合には、無人機の設計時に考慮されていない製造要因や、環境要因によって、制御信号が実際の運用状況を考慮した制御信号になっていないという問題があった。
【0006】
本開示は上記課題を鑑み、様々な状況を考慮して、適切な制御信号を与えることができる制御装置、制御方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
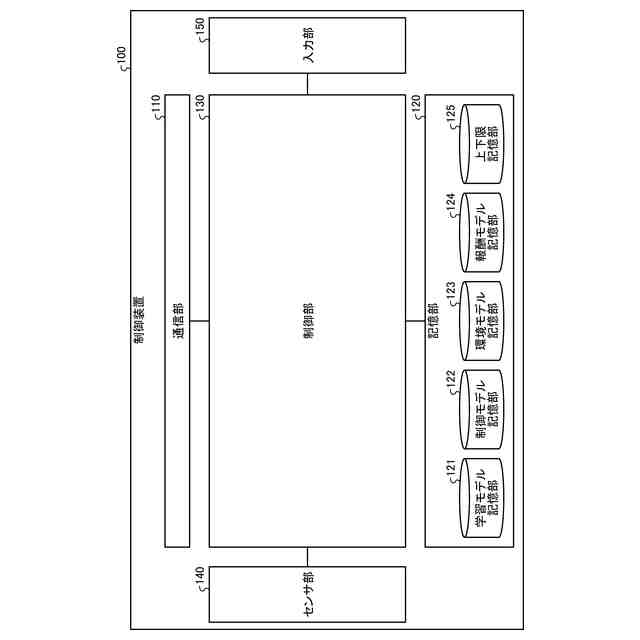
上述した課題を解決し、目的を達成するために、本開示に係る制御装置は、制御対象の制御パラメータについての制御目標値を取得する取得部と、前記制御目標値に基づいて、制御対象に与える制御信号を計算する制御信号計算部と、前記制御信号をノミナルモデルに与えた場合の出力値と、前記制御信号を派生モデルに与えた場合の出力値と、を含む要素により表される状態を観測する状態観測部と、前記状態観測部の観測した状態と、前記状態に応じた報酬に基づいて、前記制御信号を補償する適切な補償量を計算する補償量計算モデルについて、深層強化学習を実行させる深層強化学習部と、を備える。
【0008】
上述した課題を解決し、目的を達成するために、本開示に係る制御方法は、制御対象の制御パラメータについての制御目標値を取得するステップと、前記制御目標値に基づいて、制御対象に与える制御信号を計算するステップと、前記制御信号をノミナルモデルに与えた場合の出力値と、前記制御信号を派生モデルに与えた場合の出力値と、を含む要素により表される状態を観測するステップと、前記状態観測部の観測した状態と、前記状態に応じた報酬に基づいて、前記制御信号を補償する適切な補償量を計算する補償量計算モデルについて、深層強化学習を実行させるステップと、を含む。
【0009】
上述した課題を解決し、目的を達成するために、本開示に係るプログラムは、制御対象の制御パラメータについての制御目標値を取得するステップと、前記制御目標値に基づいて、制御対象に与える制御信号を計算するステップと、前記制御信号をノミナルモデルに与えた場合の出力値と、前記制御信号を派生モデルに与えた場合の出力値と、を含む要素により表される状態を観測するステップと、前記状態観測部の観測した状態と、前記状態に応じた報酬に基づいて、前記制御信号を補償する適切な補償量を計算する補償量計算モデルについて、深層強化学習を実行させるステップと、をコンピュータに実行させる。
【発明の効果】
【0010】
本開示によれば、様々な状況を考慮して、適切な制御信号を与えることができる制御装置、制御方法、及びプログラムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱重工業株式会社
加圧容器
21日前
三菱重工業株式会社
排熱回収システム
14日前
三菱重工業株式会社
放射性物質移送容器
19日前
三菱重工業株式会社
計測装置、及び積層造形装置
13日前
三菱重工業株式会社
計測装置、及び積層造形装置
13日前
三菱重工業株式会社
自転防止機構、及びスクロール圧縮機
15日前
三菱重工業株式会社
アンモニア分解触媒および排ガス処理方法
14日前
三菱重工業株式会社
ガスタービン起動方法、及び、ガスタービン
5日前
三菱重工業株式会社
静翼セグメント、及びこれを備える蒸気タービン
7日前
三菱重工業株式会社
弁装置及び固体燃料粉砕装置並びに弁装置の運転方法
14日前
三菱重工業株式会社
経路生成装置、経路生成方法、および経路生成プログラム
14日前
三菱重工業株式会社
治具モデル作成装置、治具モデル作成方法及びプログラム
13日前
三菱重工業株式会社
圧縮機静翼、これを備える圧縮機、及びガスタービン設備
14日前
三菱重工業株式会社
電解装置の運転方法、電解装置の制御装置、および電解システム
14日前
三菱重工業株式会社
電解装置、電解装置の制御方法および電解装置の制御プログラム
14日前
三菱重工業株式会社
水電解装置の運転方法、水電解装置用の制御装置及び水素製造設備
14日前
三菱重工業株式会社
運用条件決定装置、運用条件決定方法、及び、運用条件決定プログラム
16日前
三菱重工業株式会社
メタン酸化触媒装置の換気システム及びメタン酸化触媒装置の換気方法
14日前
三菱重工業株式会社
ガスケット接続部信頼性評価システム、ガスケット接続部信頼性評価方法及びプログラム
5日前
三菱重工業株式会社
ボイラの制御装置、これを備えたボイラシステム、ボイラの制御方法及びボイラの制御プログラム
14日前
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社FUJI
工作機械
3か月前
株式会社カネカ
製造システム
19日前
株式会社ダイヘン
移動体
3か月前
愛知製鋼株式会社
車両用システム
27日前
ローム株式会社
基準電圧源
16日前
株式会社FUJI
加工機械ライン
2か月前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社ダイフク
搬送設備
5日前
株式会社ダイフク
搬送設備
23日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ