TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025121224
公報種別
公開特許公報(A)
公開日
2025-08-19
出願番号
2024016540
出願日
2024-02-06
発明の名称
画像処理装置
出願人
Astemo株式会社
代理人
弁理士法人平木国際特許事務所
主分類
G06T
7/00 20170101AFI20250812BHJP(計算;計数)
要約
【課題】物体が近傍に多数存在するような状況で、カメラ画像のテクスチャを用いて追跡をする際、処理負荷と画像の保存容量を抑制しつつ、車両制御に係る物体の追跡を確実に行うことができる画像処理装置を提供する。
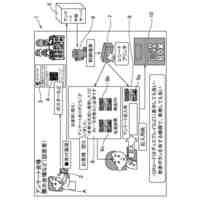
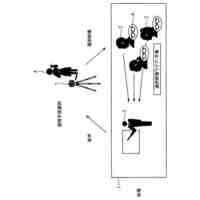
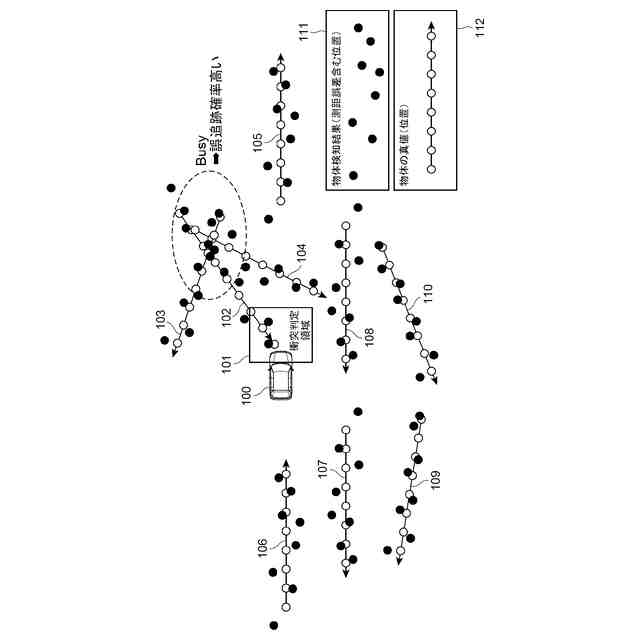
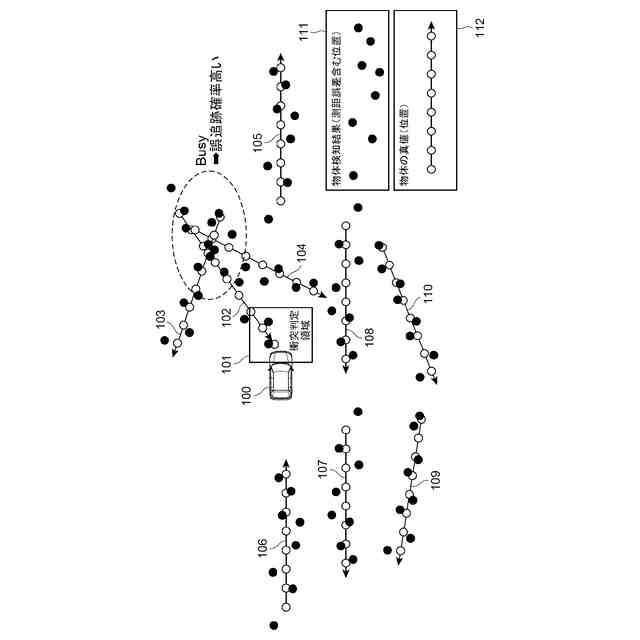
【解決手段】カメラ装置200やそれを搭載する車両100の付近の予め定められた領域に入った物体を、時間を遡る方向に画像追跡を行い、近傍物体追跡で確実に追跡できる物体を画像追跡の対象外とすることで、必要最小限の画像追跡を行い、過去に遡り追跡するための画像容量を抑制する。
【選択図】図1
特許請求の範囲
【請求項1】
自車両に搭載された撮像装置により撮像された画像を取得する画像取得部と、
過去時点で撮像された前記画像を保存する画像保存部と、
前記画像に基づいて、物体を検知する物体検知部と、
時系列で撮像された複数の前記画像に含まれる前記物体の特徴量に基づいて、前記物体を追跡する第一の追跡部と、を備え、
前記第一の追跡部は、
前記画像保存部に保存された複数の前記画像のうち、前記物体検知部により検知された物体に含まれる一又は複数の第一の追跡対象物体が撮像された画像を参照し、
第一の時点に撮像された画像から前記第一の時点よりも前の第二の時点に撮像された画像に対して前記物体の特徴量を探索することで、前記第一の追跡対象物体を追跡し、
前記追跡の結果を出力する、
画像処理装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載された画像処理装置であって、
前記画像に基づいて、前記物体の種別を識別する識別部と、
時系列で撮像された複数の前記画像に撮像された前記物体の種別に基づいて、前記物体検知部により検知された物体に含まれる一又は複数の第二の追跡対象物体を追跡する第二の追跡部と、
前記第二の追跡部により追跡された第二の追跡対象物体が撮像された画像の一部又は全部を前記画像保存部から削除する画像削除部と、を備える、
画像処理装置。
【請求項3】
請求項2に記載された画像処理装置であって、
前記第二の追跡部は、
前記物体の種別に応じて追跡範囲を設定し、
第一の時刻に撮像された画像と前記第一の時刻よりも前の第二の時刻に撮像された画像において、前記設定した追跡範囲の中に同一種別の物体が一つのみ存在すると、当該物体を同一物体であるとして追跡する、
画像処理装置。
【請求項4】
請求項2に記載された画像処理装置であって、
前記物体毎に、前記第一の追跡対象物体、前記第二の追跡対象物体、又は、前記第一の追跡対象物体及び前記第二の追跡対象物体以外の追跡対象外物体のいずれかを選択する選択部を備える、
画像処理装置。
【請求項5】
請求項4に記載された画像処理装置であって、
前記自車両の周辺に当該自車両と物体との衝突リスクを判定する衝突回避判定領域を設定する領域設定部を備え、
前記選択部は、前記衝突回避判定領域に存在する物体を前記第二の追跡対象物体として選択する、
画像処理装置。
【請求項6】
請求項4に記載された画像処理装置であって、
前記選択部は、前記自車両の位置及び進行方向と、前記物体の位置及び進行方向に応じて、前記物体毎に、前記第一の追跡対象物体、前記第二の追跡対象物体、又は、前記追跡対象外物体のいずれかを選択する、
画像処理装置。
【請求項7】
請求項2に記載された画像処理装置であって、
前記画像保存部に保存された画像の部分領域又は全領域を削除する画像削除部を備え、
前記画像削除部は、前記第一の追跡部又は前記第二の追跡部による追跡が完了した時刻までの画像の部分領域又は全領域を削除する、
画像処理装置。
【請求項8】
請求項1に記載された画像処理装置であって、
前記物体の位置、種別及び追跡の実行状態を少なくとも含む物体履歴情報を保存する物体履歴保存部を備え、
前記第一の追跡部は、前記物体履歴保存部に保存された前記物体履歴情報に基づいて、前記第一の追跡対象物体を追跡する、
画像処理装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像処理装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
先行技術として、特許文献1に示すような技術があり、これには、制御対象の可能性がある物体(物標)を継続的に検知して追跡を行うことが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-80938号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年、自動運転(AD:Autonomous Driving)システムや、先進運転支援システム(ADAS:Advanced Driver-Assistance Systems)を搭載した車両が普及しつつある。これらのシステムを実現するため、車両に搭載されたカメラの画像を処理して車両の外部環境を認識している。ADやADAS用カメラでは、物体の位置だけではなく速度も推定して、衝突判定を行うため、同一物体の追跡処理が必要である。物体の追跡処理では、時間軸前後で近傍に居るものを同一物体と判定して追跡する近傍物体追跡処理をすると、物体が近傍に多数存在して混み合う状況では乗り移りが生じるため、見た目(カメラ画像のテクスチャ)で同一物体を特定して追跡する画像追跡処理をする。しかし、画像追跡処理は、処理負荷が重く、全物体の追跡は困難である。
【0005】
本発明は、上記課題に鑑みてなされたものであり、物体が近傍に多数存在するような状況で、カメラ画像のテクスチャを用いて追跡をする際、処理負荷と画像の保存容量を抑制しつつ、車両制御に係る物体の追跡を確実に行うことができる画像処理装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係る画像処理装置は、自車両に搭載された撮像装置により撮像された画像を取得する画像取得部と、過去時点で撮像された前記画像を保存する画像保存部と、前記画像に基づいて、物体を検知する物体検知部と、時系列で撮像された複数の前記画像に含まれる前記物体の特徴量に基づいて、前記物体を追跡する第一の追跡部と、を備え、前記第一の追跡部は、前記画像保存部に保存された複数の前記画像のうち、前記物体検知部により検知された物体に含まれる一又は複数の第一の追跡対象物体が撮像された画像を参照し、第一の時点に撮像された画像から前記第一の時点よりも前の第二の時点に撮像された画像に対して前記物体の特徴量を探索することで、前記第一の追跡対象物体を追跡し、前記追跡の結果を出力する。
【発明の効果】
【0007】
本発明によれば、制御対象の可能性のある近傍に検知された物体を、過去を遡る形で画像追跡する。その際、問題となる過去画像の保存容量増大を、下記順序で画像追跡に必要なデータを絞り込み、不必要なデータを削除して抑制する。これにより、処理負荷と画像の保存容量を抑制しつつ、車両制御に係る物体の追跡処理を確実に行うことができる。
【0008】
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
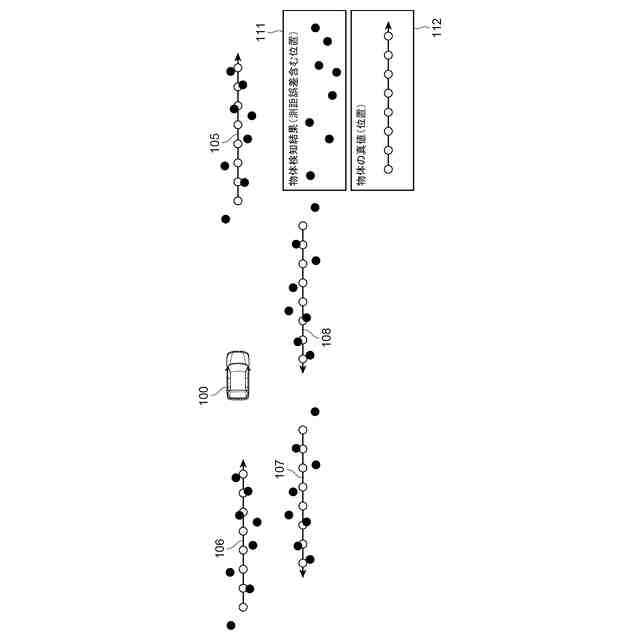
本実施例に係るカメラ装置の動作例を示す状態を説明する車両と物体の検知位置の俯瞰図。
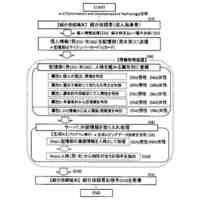
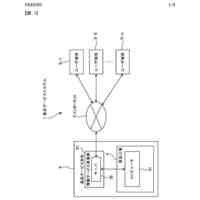
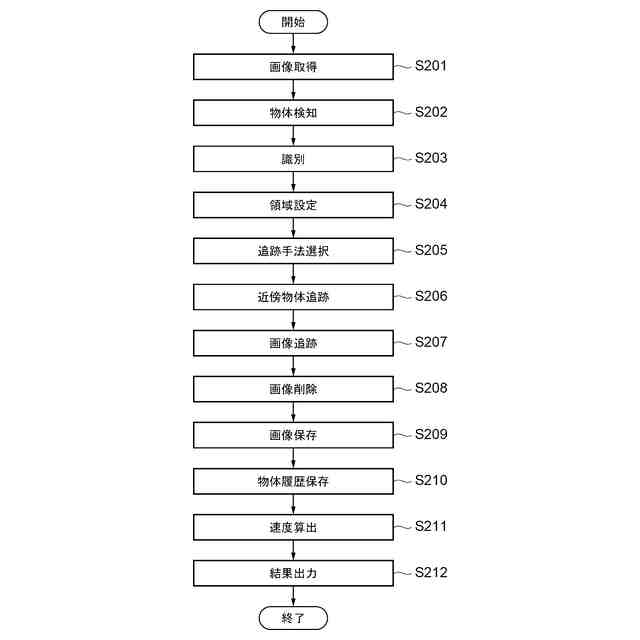
本実施例に係るカメラ装置のフローチャート。
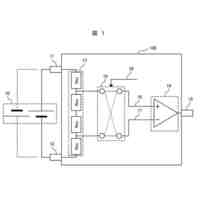
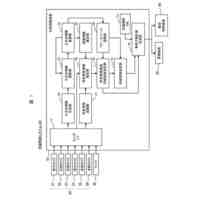
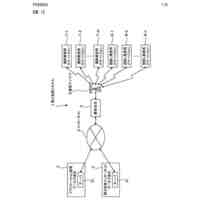
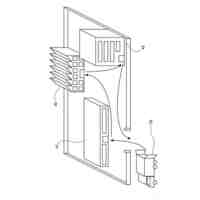
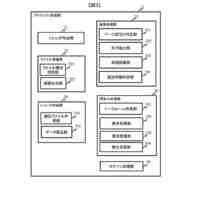
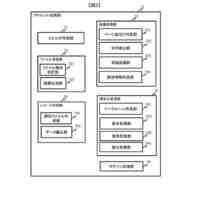
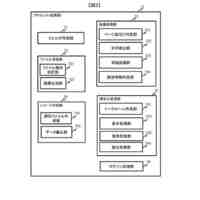
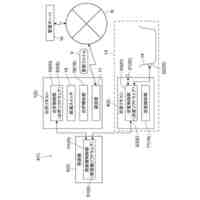
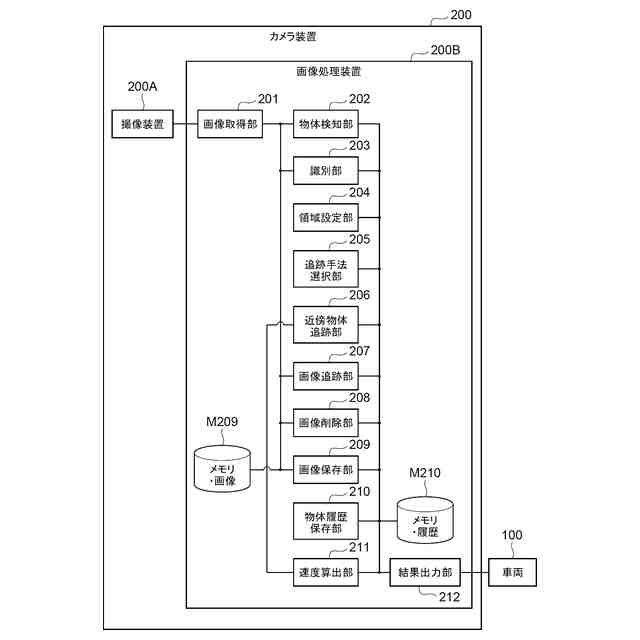
本実施例に係るカメラ装置のブロック図。
本実施例に係るカメラ装置の動作例を示す状態を説明する車両と物体の検知位置の俯瞰図で、特定種別以外の種別の物体の検知位置に絞り込んだもの。
本実施例に係るカメラ装置の動作例を示す状態を説明する車両と物体の検知位置の俯瞰図で、近傍物体追跡法で同一物体と断定できるものに絞り込んだもの。
本実施例に係るカメラ装置の動作例を示す状態を説明する車両と物体の検知位置の俯瞰図で、近傍物体追跡法で特定種別の同一物体と断定できるものに絞り込んだもの。
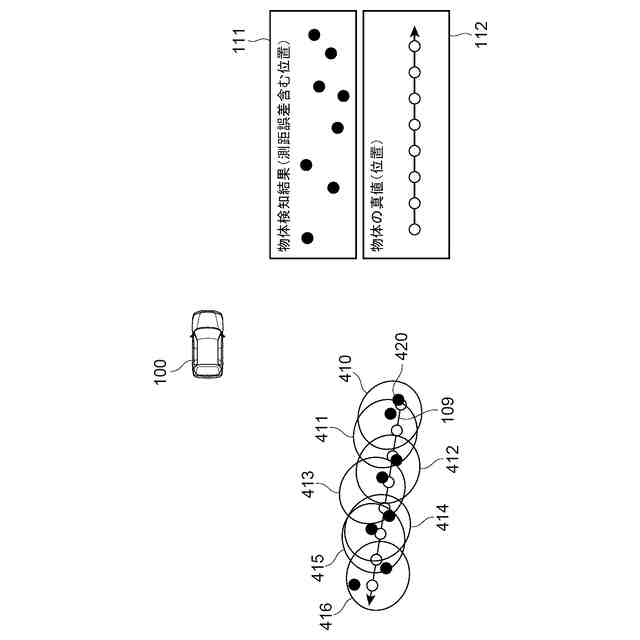
本実施例に係るカメラ装置の動作例を示す状態を説明する車両と物体の検知位置の俯瞰図で、近傍物体追跡法の特定種別の物体の最大移動範囲を説明するもの。
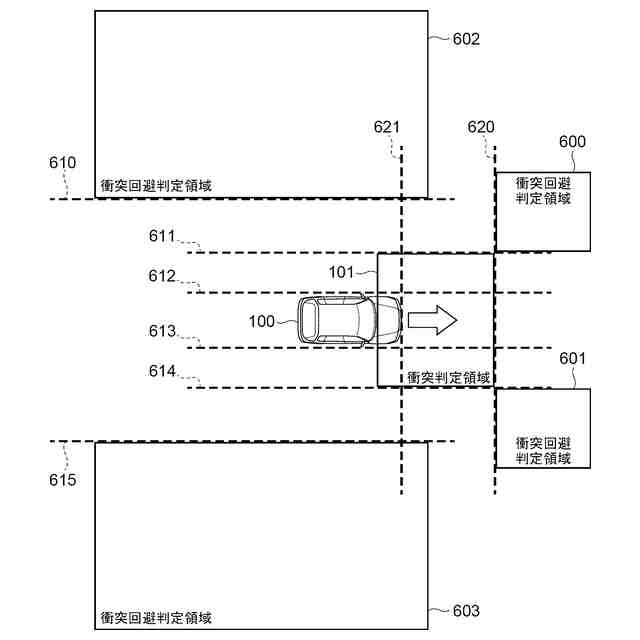
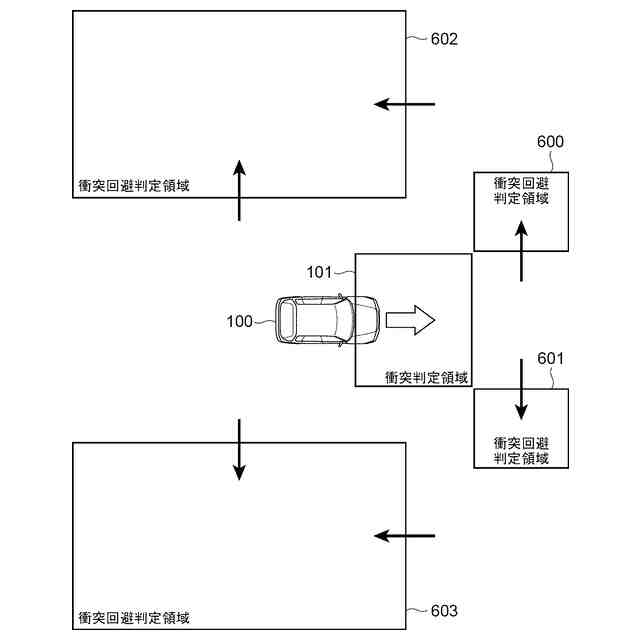
本実施例に係るカメラ装置の動作例を示す状態を説明する車両と物体の検知位置の俯瞰図で、前進時の衝突判定領域と衝突回避判定領域を説明するもの。
本実施例に係るカメラ装置の動作例を示す状態を説明する車両と物体の検知位置の俯瞰図で、前進時の衝突回避判定領域の判定の侵入方向を説明するもの。
本実施例に係るカメラ装置の動作例を示す状態を説明する車両と物体の検知位置の俯瞰図で、後退時の衝突判定領域と衝突回避判定領域を説明するもの。
本実施例に係るカメラ装置の動作例を示す状態を説明する車両と物体の検知位置の俯瞰図で、後退時の衝突回避判定領域の判定の侵入方向を説明するもの。
本実施例に係るカメラ装置の動作例を示す状態を説明する車両と物体の検知位置の俯瞰図で、前進時の衝突回避判定領域に入った物体を近傍物体追跡で絞り込む説明をするもの。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施形態を説明する。実施例は、本発明を説明するための例示であって、説明の明確化のため、適宜、省略および簡略化がなされている。本発明は、他の種々の形態でも実施することが可能である。特に限定しない限り、各構成要素は単数でも複数でも構わない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
Astemo株式会社
電磁弁
2日前
Astemo株式会社
緩衝装置
2日前
Astemo株式会社
半導体装置
6日前
Astemo株式会社
外界認識装置、および、外界認識方法
2日前
個人
工程設計支援装置
1か月前
個人
フラワーコートA
2か月前
個人
地球保全システム
8日前
個人
介護情報提供システム
2か月前
個人
冷凍食品輸出支援構造
1か月前
個人
為替ポイント伊達夢貯
1か月前
個人
携帯情報端末装置
1か月前
個人
残土処理システム
1日前
個人
表変換編集支援システム
28日前
個人
結婚相手紹介支援システム
1か月前
個人
知財出願支援AIシステム
1か月前
個人
知的財産出願支援システム
2日前
個人
行動時間管理システム
1か月前
個人
AIによる情報の売買の仲介
1か月前
個人
パスワード管理支援システム
28日前
個人
アンケート支援システム
2か月前
個人
食品レシピ生成システム
7日前
株式会社アジラ
進入判定装置
1か月前
株式会社キーエンス
受発注システム
7日前
個人
パスポートレス入出国システム
1か月前
株式会社キーエンス
受発注システム
7日前
株式会社キーエンス
受発注システム
7日前
日本精機株式会社
施工管理システム
1か月前
個人
AIキャラクター制御システム
28日前
個人
海外支援型農作物活用システム
20日前
個人
システム及びプログラム
21日前
大同特殊鋼株式会社
疵判定方法
14日前
個人
人格進化型対話応答制御システム
28日前
個人
音声対話型帳票生成支援システム
28日前
個人
SaaS型勤務調整支援システム
28日前
大阪瓦斯株式会社
住宅設備機器
1か月前
個人
社会還元・施設向け供給支援構造
28日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ