TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025120522
公報種別
公開特許公報(A)
公開日
2025-08-18
出願番号
2024015340
出願日
2024-02-05
発明の名称
電気自動車の制御システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人あーく事務所
主分類
B60L
15/20 20060101AFI20250808BHJP(車両一般)
要約
【課題】運転者が意図的に駆動輪をスリップさせる運転を可能にしながらも、状況に応じて動力伝達系の保護を図ることを可能にする電気自動車の制御システムを提供する。
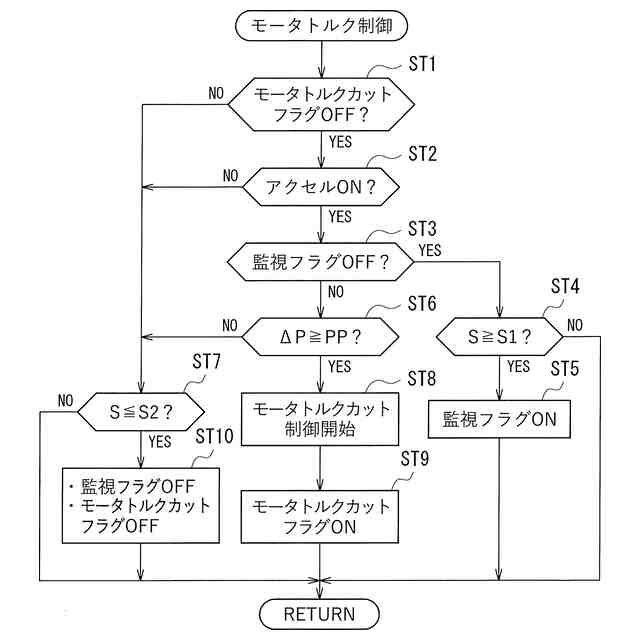
【解決手段】電気自動車の走行中における駆動輪のスリップ率が過剰スリップ率S1以上となって「トルク監視状態」に移行し、その状態が維持され、且つ所定期間における駆動輪のスリップ率の時間変化率の変動幅がトルク制御開始閾値PP以上となったことを条件として、走行用モータの出力トルクを零にする。これにより、運転者が意図的に駆動輪をスリップさせる運転を可能にしながらも、状況に応じて動力伝達系の保護を図ることが可能になる。
【選択図】図4
特許請求の範囲
【請求項1】
駆動輪に出力するトルクが可変とされた走行用モータを備えた電気自動車の制御システムにおいて、
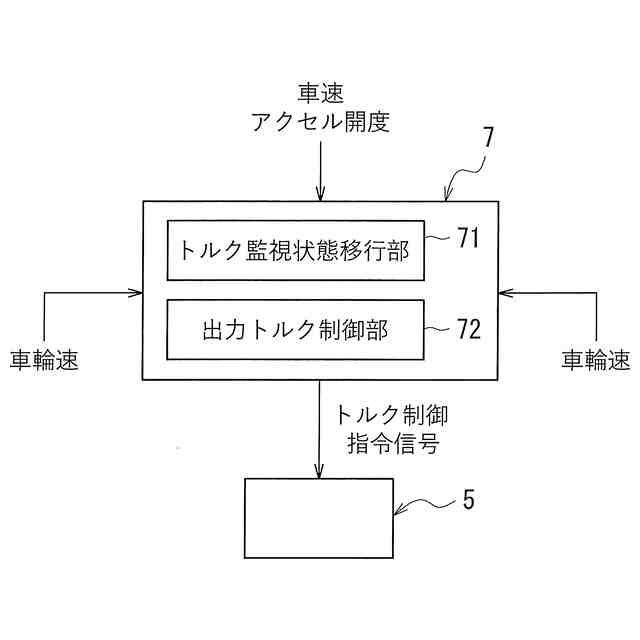
前記電気自動車の走行中における前記駆動輪のスリップ率が所定の第1閾値以上となったことを条件としてトルク監視状態に移行させるトルク監視状態移行部と、
前記トルク監視状態移行部によって前記トルク監視状態に移行された状態が維持されており、且つ所定期間における前記駆動輪のスリップ率の時間変化率の変動幅が所定の第2閾値以上となったことを条件として、前記走行用モータの出力トルクを零にする出力トルク制御部とを備えていることを特徴とする電気自動車の制御システム。
続きを表示(約 950 文字)
【請求項2】
運転者によって操作されるアクセルの操作量に応じて、駆動輪に出力するトルクが可変とされた走行用モータを備えた電気自動車の制御システムにおいて、
前記電気自動車の走行中における前記駆動輪のスリップ率が所定の第1閾値以上となったことを条件としてトルク監視状態に移行させるトルク監視状態移行部と、
前記トルク監視状態移行部によって前記トルク監視状態に移行された状態が維持されており、且つ所定期間における前記駆動輪のスリップ率の時間変化率の変動幅が所定の第2閾値以上となったことを条件として、前記走行用モータの出力トルクを、前記運転者によるアクセルの操作量に応じた出力トルクよりも低く設定する出力トルク制御部とを備えていることを特徴とする電気自動車の制御システム。
【請求項3】
請求項1記載の電気自動車の制御システムにおいて、
前記出力トルク制御部は、前記走行用モータの出力トルクを零にした後、前記駆動輪のスリップ率が、前記第1閾値よりも低い所定の第3閾値以下となったことを条件として前記走行用モータの出力トルクを復帰させることを特徴とする電気自動車の制御システム。
【請求項4】
請求項2記載の電気自動車の制御システムにおいて、
前記出力トルク制御部は、前記走行用モータの出力トルクを前記運転者によるアクセルの操作量に応じた出力トルクよりも低く設定した後、前記駆動輪のスリップ率が、前記第1閾値よりも低い所定の第3閾値以下となったことを条件として前記走行用モータの出力トルクを、前記運転者によるアクセルの操作量に応じた出力トルクに復帰させることを特徴とする電気自動車の制御システム。
【請求項5】
請求項1~4のうち何れか一つに記載の電気自動車の制御システムにおいて、
前記トルク監視状態移行部は、前記駆動輪のスリップ率が前記第1閾値以上となった後、所定期間における前記駆動輪のスリップ率の時間変化率の変動幅が前記第2閾値以上となることなしに、前記駆動輪のスリップ率が前記第1閾値よりも低い所定の第3閾値以下となったことを条件として前記トルク監視状態を解除することを特徴とする電気自動車の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は電気自動車の制御システムに係る。特に、本発明は、走行用モータのトルク制御の改良に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、過大な駆動力による過大なスリップや過小な駆動力による加速不良を防止する電気自動車の制御システムが開示されている。具体的に、この特許文献1では、車両の運転状態に基づいて設定した目標スリップに基づいて車輪の目標回転速度を計算し、この目標回転速度を実現するための第1目標トルクを計算する。また、路面の推定摩擦係数と接地荷重とに基づいて設定された車輪の目標駆動力を実現するための第2目標トルクを計算する。そして、第1目標トルクを要求値とし第2目標トルクを制約条件として調停目標トルクを決定し、この調停目標トルクに基づいて走行用モータを制御するようにしている。
【先行技術文献】
【特許文献】
【0003】
特開2023-56277号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、高トルクが出力可能な走行用モータを搭載した電気自動車にあっては、運転者が、急速な加速によるホイールスピンやパワースライド(後輪駆動車におけるパワースライド)といった意図的に駆動輪をスリップさせる運転を望む場合がある。
【0005】
しかしながら、特許文献1に開示されている制御システムが適用された電気自動車にあっては、走行用モータに対する前記制御の介入に起因して(第2目標トルクによる制約を受けて)、前述した意図的な駆動輪のスリップを行うことができなくなり、運転者の意図とは異なる車両挙動となってしまう可能性がある。
【0006】
特許文献1に開示されている制御の介入を停止したり、または、この制御システムを採用しないようにすれば、運転者が望む意図的な駆動輪のスリップを実現することは可能になるが、この際、駆動輪と路面との間での摩擦力の変化に伴って動力伝達系でのねじれ振動(自励振動)が大きくなってしまうことが懸念される。つまり、エンジン(内燃機関)を搭載した車両であれば、動力伝達系にトルクコンバータが介在されていることから、エンジンの出力トルクが急上昇した場合であっても、トルクコンバータでの減衰作用によって、動力伝達系に過大な負荷が作用することは抑制されるが、電気自動車にあっては、動力伝達系にトルクコンバータが介在されていないことから、駆動輪をスリップさせた際の動力伝達系でのねじれ振動が大きくなり、動力伝達系に悪影響を与えてしまう可能性があった。
【0007】
このため、運転者が意図的に駆動輪をスリップさせる運転を可能としながらも、動力伝達系でのねじれ振動が大きくなる状況では動力伝達系の保護を図ることができる制御の実現が求められていた。
【0008】
本発明は、かかる点に鑑みてなされたものであり、その目的とするところは、運転者が意図的に駆動輪をスリップさせる運転を可能にしながらも、状況に応じて動力伝達系の保護を図ることを可能にする電気自動車の制御システムを提供することにある。
【課題を解決するための手段】
【0009】
前記の目的を達成するための本発明の解決手段は、駆動輪に出力するトルクが可変とされた走行用モータを備えた電気自動車の制御システムを前提とする。そして、この電気自動車の制御システムは、前記電気自動車の走行中における前記駆動輪のスリップ率が所定の第1閾値以上となったことを条件としてトルク監視状態に移行させるトルク監視状態移行部と、前記トルク監視状態移行部によって前記トルク監視状態に移行された状態が維持されており、且つ所定期間における前記駆動輪のスリップ率の時間変化率の変動幅が所定の第2閾値以上となったことを条件として、前記走行用モータの出力トルクを零にする出力トルク制御部とを備えていることを特徴とする。
【0010】
この特定事項により、電気自動車の走行中における駆動輪のスリップ率が第1閾値未満である場合や、このスリップ率が第1閾値以上となった場合であっても(駆動輪のスリップが発生している状況であっても)所定期間における駆動輪のスリップ率の時間変化率の変動幅が第2閾値未満である場合であれば、動力伝達系でのねじれ振動が大きくなってしまう状況にはないと判断され、走行用モータの出力トルクを運転者の要求に応じた値に制御する。これにより、運転者が意図的に駆動輪をスリップさせる運転が可能となる。一方、駆動輪のスリップ率が第1閾値以上となってトルク監視状態に移行し、その状態が維持されており、且つ所定期間における駆動輪のスリップ率の時間変化率の変動幅が第2閾値以上となった場合には、動力伝達系でのねじれ振動が大きくなってしまう状況にあると判断され、走行用モータの出力トルクを零にする。これにより、動力伝達系の保護を図ることが可能になる。このように、本解決手段によれば、運転者が意図的に駆動輪をスリップさせる運転を可能にしながらも、状況に応じて(動力伝達系でのねじれ振動が大きくなってしまう条件が成立した場合に)動力伝達系の保護を図ることが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
2か月前
個人
タイヤレバー
23日前
個人
ルーフ付きトライク
14日前
個人
車輪清掃装置
2か月前
個人
ホイルのボルト締結
1か月前
井関農機株式会社
作業車両
2か月前
個人
キャンピングトライク
2か月前
日本精機株式会社
表示装置
4日前
日本精機株式会社
表示装置
21日前
個人
車両通過構造物
24日前
日本精機株式会社
表示装置
21日前
日本精機株式会社
表示装置
21日前
井関農機株式会社
作業車両
2か月前
個人
車両用スリップ防止装置
1か月前
個人
アクセルのソフトウェア
1か月前
個人
乗合路線バスの客室装置
1か月前
個人
キャンピングトレーラー
2か月前
株式会社ニフコ
照明装置
2日前
日本精機株式会社
車載表示装置
1か月前
株式会社ニフコ
保持装置
1か月前
個人
車載小物入れ兼雨傘収納具
1か月前
個人
円湾曲ホイール及び球体輪
1か月前
個人
音声ガイド、音声サービス
29日前
株式会社豊田自動織機
産業車両
18日前
日本精機株式会社
車両用投影装置
2か月前
日本精機株式会社
車両用投影装置
2か月前
日本精機株式会社
車両用表示装置
14日前
日本無線株式会社
取付金具
1か月前
日本精機株式会社
車両用表示装置
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
トヨタ自動車株式会社
車両
2か月前
極東開発工業株式会社
車両
21日前
スズキ株式会社
運転支援装置
3日前
エムケー精工株式会社
車両処理装置
25日前
トヨタ自動車株式会社
運搬車両
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ