TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115681
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024010256
出願日
2024-01-26
発明の名称
車両制御装置、車両制御方法及び車両制御プログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
50/12 20120101AFI20250731BHJP(車両一般)
要約
【課題】車両の進行方向前方に位置する物体に車両が衝突する可能性を低減する。
【解決手段】走行中の車両100の速度を制御する車両制御装置は、所定の減速条件が成立したときに車両を減速させる減速制御を実行する減速部332と、減速制御の実行中にアクセルペダルの所定の操作が検出されたときに減速制御を解除してアクセルペダルの操作に応じた車両の速度制御を行う速度制御部335と、車両の前方に物体が検出されている場合に車両と物体とが衝突する可能性を判定する判定部334と、を備える。速度制御部は、車両と物体との衝突可能性が高いと判定された場合には、衝突可能性が低いと判定された場合に比べて、アクセルペダルの踏み込み量に対する車両の加速度が低くなるように車両の速度制御を行う。
【選択図】図10
特許請求の範囲
【請求項1】
走行中の車両の速度を制御する車両制御装置であって、
所定の減速条件が成立したときに前記車両を減速させる減速制御を実行する減速部と、
前記減速制御の実行中にアクセルペダルの所定の操作が検出されたときに前記減速制御を解除して前記アクセルペダルの操作に応じた前記車両の速度制御を行う速度制御部と、
前記車両の前方に物体が検出されている場合に前記車両と前記物体とが衝突する可能性を判定する判定部と、
を備え、
前記速度制御部は、前記車両と前記物体との衝突可能性が高いと判定された場合には、前記衝突可能性が低いと判定された場合に比べて、前記アクセルペダルの踏み込み量に対する前記車両の加速度が低くなるように前記車両の速度制御を行う、車両制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記判定部は、前記車両が道路上の走行可能範囲内を通って前記物体の側方を通過するときに前記車両と前記物体との間に取り得る間隔に基づいて、前記車両と前記物体との衝突可能性を判定する、請求項1に記載の車両制御装置。
【請求項3】
前記走行可能範囲は、前記車両が走行している車線の幅方向の範囲内である、請求項2に記載の車両制御装置。
【請求項4】
前記走行可能範囲は、前記車両が走行している道路の幅方向の範囲内である、請求項2に記載の車両制御装置。
【請求項5】
前記速度制御部は、前記車両が道路上の走行可能範囲内を通って前記物体の側方を通過するときに前記車両と前記物体との間に取り得る間隔が短くなるほど、前記アクセルペダルの踏み込み量に対する前記車両の加速度が低くなるように、前記車両の速度制御を行う、請求項2~4のいずれか1項に記載の車両制御装置。
【請求項6】
前記判定部は、前記車両が道路上の走行可能範囲内を通って前記物体の側方を通過するときに前記車両と前記物体との間に取り得る間隔に加えて、前記物体の種類又は状況に基づいて、前記車両と前記物体との衝突可能性を判定する、請求項2~4のいずれか1項に記載の車両制御装置。
【請求項7】
前記判定部は、前記車両のドライバが前記物体を認識しているか否かに基づいて、前記車両と前記物体との衝突可能性を判定する、請求項1又は2に記載の車両制御装置。
【請求項8】
前記判定部は、前記車両のドライバが前記物体を認識しているか否かに基づいて、前記車両と前記物体との衝突可能性を判定し、前記車両のドライバが前記物体を認識していないときには、前記車両が道路上の走行可能範囲内を通って前記物体の側方を通過するときに前記車両と前記物体との間に取り得る間隔とは無関係に、前記車両と前記物体との衝突可能性が高いと判定する、請求項2~4のいずれか1項に記載の車両制御装置。
【請求項9】
前記速度制御部は、前記車両と前記物体との衝突可能性が低いと判定された場合には、前記アクセルペダルの踏み込み量に対応する通常の加速度にて前記車両が加速し、前記車両と前記物体との衝突可能性が高いと判定された場合には、前記アクセルペダルの踏み込み量に対応する通常の加速度よりも低い加速度にて前記車両が加速するように、前記車両の速度制御を行う、請求項1又は2に記載の車両制御装置。
【請求項10】
前記アクセルペダルの踏み込み量に対応する通常の加速度よりも低い加速度にて前記車両が加速されるときには、その旨をドライバに通知する通知部を更に備える、請求項9に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御方法及び車両制御プログラムに関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
車両の進行方向前方に物体が存在して物体と車両とが衝突する可能性がある場合に、車両と物体との衝突を回避するために車両に制動力を付与するなどの衝突回避制御を行う走行支援装置が知られている(特許文献1など)。
【先行技術文献】
【特許文献】
【0003】
特開2018-012360号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の走行支援装置では、車両の進行方向前方に物体が存在しているときに、ドライバがその物体を認識したうえでドライバにとって安全な速度で走行していても、制動力の付与などの衝突回避制御が実行される場合がある。したがって、このような場合に、ドライバが衝突回避制御を不要であると判断したときに、アクセルペダルで所定の操作を行うことによって、衝突回避制御を停止させることが考えられる。
【0005】
ところが、ドライバが衝突回避制御を停止させるべくアクセルペダルの操作を行うと、ドライバが誤って必要以上にアクセルペダルを踏み込み過ぎてしまう可能性がある。このようにドライバが必要以上にアクセルペダルを踏み込み過ぎると、ドライバの意図を上回る加速度で加速してしまい、車両の進行方向前方に存在している物体に衝突する可能性がある。
【0006】
上記課題に鑑みて、本開示の目的は、ドライバが必要以上にアクセルペダルを踏み込んでしまったときに車両の進行方向前方に位置する物体に車両が衝突する可能性を低減することにある。
【課題を解決するための手段】
【0007】
本開示の要旨は以下のとおりである。
【0008】
(1) 走行中の車両の速度を制御する車両制御装置であって、
所定の減速条件が成立したときに前記車両を減速させる減速制御を実行する減速部と、
前記減速制御の実行中にアクセルペダルの所定の操作が検出されたときに前記減速制御を解除して前記アクセルペダルの操作に応じた前記車両の速度制御を行う速度制御部と、
前記車両の前方に物体が検出されている場合に前記車両と前記物体とが衝突する可能性を判定する判定部と、
を備え、
前記速度制御部は、前記車両と前記物体との衝突可能性が高いと判定された場合には、前記衝突可能性が低いと判定された場合に比べて、前記アクセルペダルの踏み込み量に対する前記車両の加速度が低くなるように前記車両の速度制御を行う、車両制御装置。
(2) 前記判定部は、前記車両が道路上の走行可能範囲内を通って前記物体の側方を通過するときに前記車両と前記物体との間に取り得る間隔に基づいて、前記車両と前記物体との衝突可能性を判定する、上記(1)に記載の車両制御装置。
(3) 前記走行可能範囲は、前記車両が走行している車線の幅方向の範囲内である、上記(2)に記載の車両制御装置。
(4) 前記走行可能範囲は、前記車両が走行している道路の幅方向の範囲内である、上記(2)に記載の車両制御装置。
(5) 前記速度制御部は、前記車両が道路上の走行可能範囲内を通って前記物体の側方を通過するときに前記車両と前記物体との間に取り得る間隔が短くなるほど、前記アクセルペダルの踏み込み量に対する前記車両の加速度が低くなるように、前記車両の速度制御を行う、上記(2)~(4)のいずれか1つに記載の車両制御装置。
(6) 前記判定部は、前記車両が道路上の走行可能範囲内を通って前記物体の側方を通過するときに前記車両と前記物体との間に取り得る間隔に加えて、前記物体の種類又は状況に基づいて、前記車両と前記物体との衝突可能性を判定する、上記(2)~(5)のいずれか1つに記載の車両制御装置。
(7) 前記判定部は、前記車両のドライバが前記物体を認識しているか否かに基づいて、前記車両と前記物体との衝突可能性を判定する、上記(1)~(6)のいずれか1つに記載の車両制御装置。
(8) 前記判定部は、前記車両のドライバが前記物体を認識しているか否かに基づいて、前記車両と前記物体との衝突可能性を判定し、前記車両のドライバが前記物体を認識していないときには、前記車両が道路上の走行可能範囲内を通って前記物体の側方を通過するときに前記車両と前記物体との間に取り得る間隔とは無関係に、前記車両と前記物体との衝突可能性が高いと判定する、上記(2)~(6)のいずれか1つに記載の車両制御装置。
(9) 前記速度制御部は、前記車両と前記物体との衝突可能性が低いと判定された場合には、前記アクセルペダルの踏み込み量に対応する通常の加速度にて前記車両が加速し、前記車両と前記物体との衝突可能性が高いと判定された場合には、前記アクセルペダルの踏み込み量に対応する通常の加速度よりも低い加速度にて前記車両が加速するように、前記車両の速度制御を行う、上記(1)~(8)のいずれか1つに記載の車両制御装置。
(10) 前記アクセルペダルの踏み込み量に対応する通常の加速度よりも低い加速度にて前記車両が加速されるときには、その旨をドライバに通知する通知部を更に備える、上記(9)に記載の車両制御装置。
(11) 前記速度制御部は、前記車両と前記物体との衝突可能性が高いと判定された場合には、前記アクセルペダルの踏み込み量が一定量以上であると該踏み込み量に関わらずに前記車両の加速度が一定の加速度となるように前記車両の速度制御を行う、上記(1)~(10)のいずれか1つに記載の車両制御装置。
(12) 前記減速制御を解除するための前記アクセルペダルの所定の操作は、前記減速制御の実行開始後に前記アクセルペダルが所定量以上踏み込まれること又は前記アクセルペダルが所定速度以上の踏み込み速度で踏み込まれることである、上記(1)~(11)のいずれか1つに記載の車両制御装置。
(13) 前記速度制御部は、前記減速制御が解除された後ではない通常制御が行われているときには、前記車両と前記物体との衝突可能性に関わらずに、前記アクセルペダルの踏み込み量に対して前記車両の加速度が同一になるように、前記車両の速度制御を行う、上記(1)~(12)のいずれか1つに記載の車両制御装置。
(14) 走行中の車両の速度を制御する車両制御方法であって、
所定の減速条件が成立したときに前記車両を減速させる減速制御を実行することと、
前記減速制御の実行中にアクセルペダルの所定の操作が検出されたときに前記減速制御を解除して前記アクセルペダルの操作に応じた前記車両の速度制御を行うことと、
前記車両の前方に物体が検出されている場合に前記車両と前記物体とが衝突する可能性を判定することと、
を含み、
前記車両の速度制御は、前記車両と前記物体との衝突可能性が高いと判定された場合には、前記衝突可能性が低いと判定された場合に比べて、前記アクセルペダルの踏み込み量に対する前記車両の加速度が低くなるように行われる、車両制御方法。
(15) 走行中の車両の速度を制御する車両制御プログラムであって、
所定の減速条件が成立したときに前記車両を減速させる減速制御を実行することと、
前記減速制御の実行中にアクセルペダルの所定の操作が検出されたときに前記減速制御を解除して前記アクセルペダルの操作に応じた前記車両の速度制御を行うことと、
前記車両の前方に物体が検出されている場合に前記車両と前記物体とが衝突する可能性を判定することと、
をコンピュータに実行させ、
前記車両の速度制御は、前記車両と前記物体との衝突可能性が高いと判定された場合には、前記衝突可能性が低いと判定された場合に比べて、前記アクセルペダルの踏み込み量に対する前記車両の加速度が低くなるように行われる、プログラム。
【発明の効果】
【0009】
本開示によれば、ドライバが必要以上にアクセルペダルを踏み込んでしまったときに車両の進行方向前方に位置する物体に車両が衝突する可能性を低減することができる。
【図面の簡単な説明】
【0010】
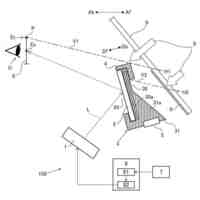
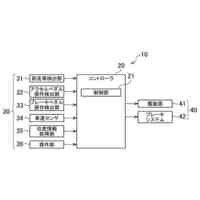
図1は、車両制御システムの構成を示す概略的なブロック図である。
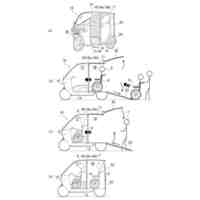
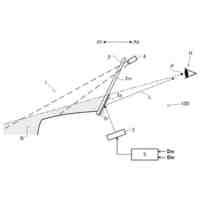
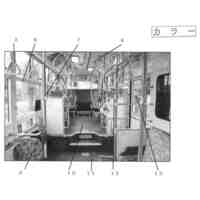
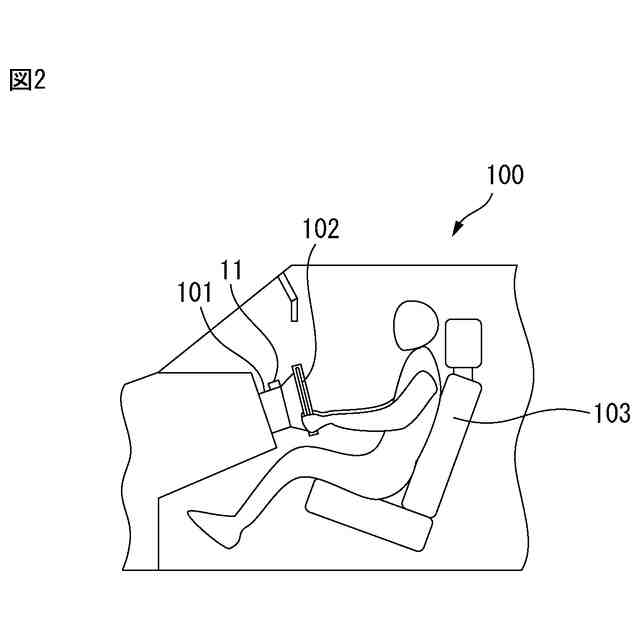
図2は、車両制御システムを搭載した車両の内部を部分的に示す概略側面図である。
図3は、ECUのプロセッサの機能ブロック図である。図
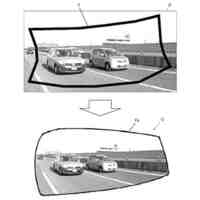
図4は、車両が走行する様子を概略的に示す図である。
図5は、車両が走行する様子を概略的に示す図である。
図6は、車両が走行する様子を概略的に示す図である。
図7は、車両が走行する様子を概略的に示す図である。
図8は、アクセルペダルの踏み込み量と車両の目標加速度との関係を示す図である。
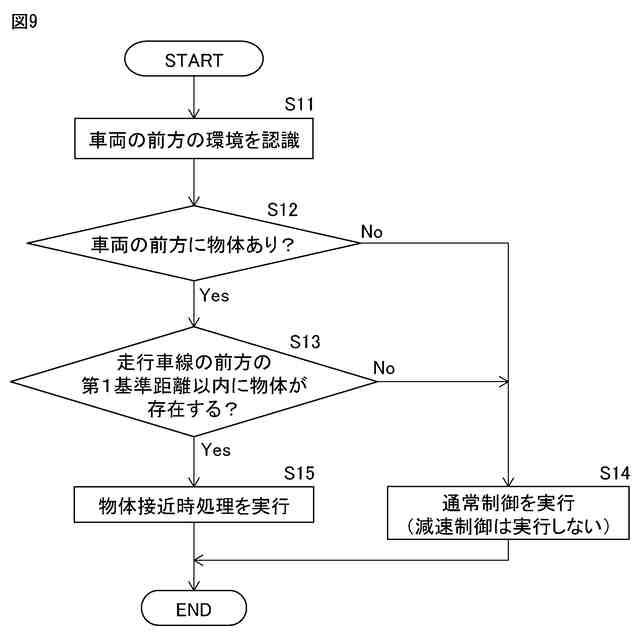
図9は、物体接近処理を実行するか否かを判断する判断処理の流れを示すフローチャートである。
図10は、物体接近時処理の流れを示すフローチャートである。
図11は、アクセルペダルの踏み込み量と車両の目標加速度との関係を示す、図8と同様な図である。
図12は、アクセルペダルの踏み込み量が一定であるときの、通過時間隔と車両の目標加速度との関係を示す図である。図
図13は、物体接近時処理の流れを示す、図10と同様なフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カーテント
2か月前
個人
タイヤレバー
25日前
個人
ルーフ付きトライク
16日前
個人
ホイルのボルト締結
1か月前
個人
車輪清掃装置
2か月前
個人
車両通過構造物
26日前
日本精機株式会社
表示装置
23日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
23日前
井関農機株式会社
作業車両
2か月前
個人
キャンピングトライク
2か月前
日本精機株式会社
表示装置
6日前
日本精機株式会社
表示装置
23日前
個人
車両用スリップ防止装置
2か月前
個人
キャンピングトレーラー
2か月前
個人
乗合路線バスの客室装置
1か月前
個人
アクセルのソフトウェア
1か月前
株式会社豊田自動織機
産業車両
20日前
株式会社ニフコ
照明装置
4日前
個人
音声ガイド、音声サービス
1か月前
個人
円湾曲ホイール及び球体輪
1か月前
日本精機株式会社
車載表示装置
1か月前
個人
車載小物入れ兼雨傘収納具
1か月前
株式会社ニフコ
保持装置
1か月前
日本無線株式会社
取付金具
1か月前
日本精機株式会社
車両用投影装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
16日前
トヨタ自動車株式会社
車両
2か月前
極東開発工業株式会社
車両
23日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
車両用投影装置
2か月前
井関農機株式会社
作業車両
2か月前
エムケー精工株式会社
車両処理装置
27日前
スズキ株式会社
運転支援装置
5日前
豊田合成株式会社
下肢保護装置
18日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ