TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025114153
公報種別
公開特許公報(A)
公開日
2025-08-05
出願番号
2024008656
出願日
2024-01-24
発明の名称
画像処理装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250729BHJP(信号)
要約
【課題】車載の複数のカメラのそれぞれから得られた画像に対して所定の処理を実行するための演算リソースを適切に設定することができる画像処理装置を提供する。
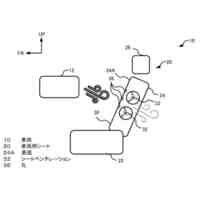
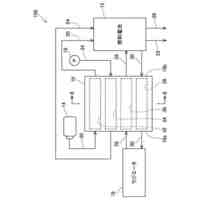
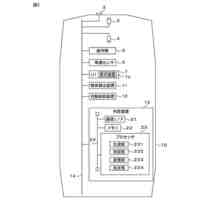
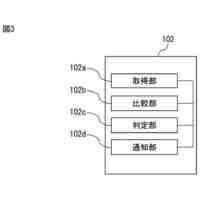
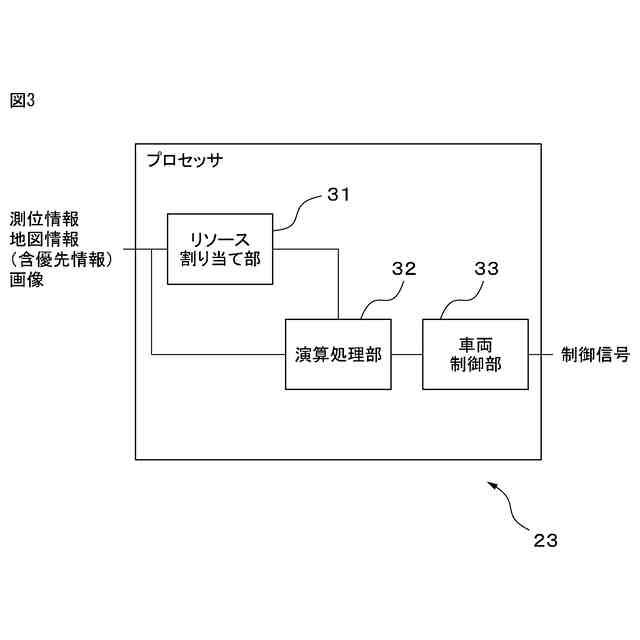
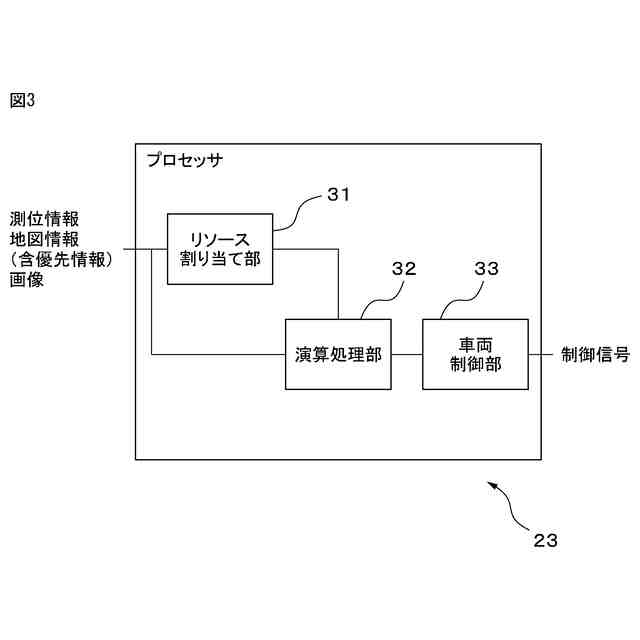
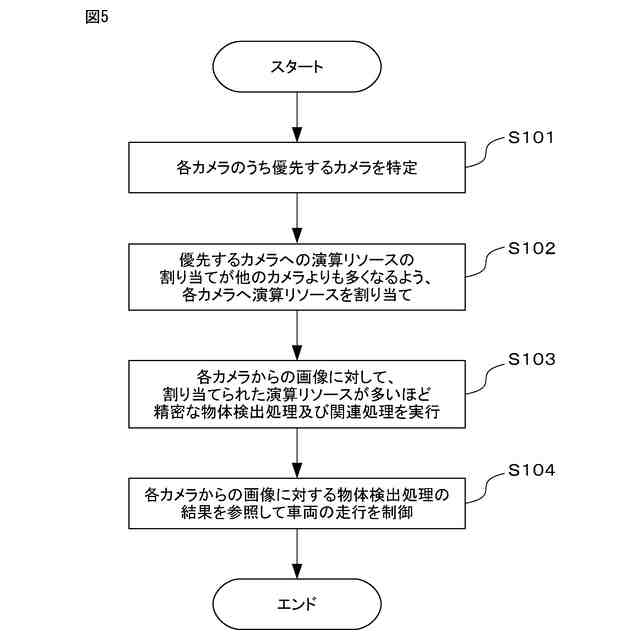
【解決手段】画像処理装置は、優先情報に基づいて、車両10が所定の区間を走行しているときに、車両10の周囲の互いに異なる撮影領域を撮影する複数のカメラ(2-1~2-2)のうちの優先されるカメラを特定し、優先されるカメラにより生成された画像に対して実行される所定の処理に割り当てる演算リソースを、他のカメラにより生成された画像に対して実行される所定の処理に割り当てる演算リソースよりも多く設定するリソース割り当て部31と、複数のカメラ(2-1~2-2)のうち、割り当てられた演算リソースが多いカメラほど所定の処理の演算量が多くなるように、複数のカメラのそれぞれにより生成された画像に対して所定の処理を実行する演算処理部32とを有する。
【選択図】図3
特許請求の範囲
【請求項1】
所定の区間において、車両の周囲の互いに異なる撮影領域を撮影する複数のカメラのうち、当該所定の区間において優先されるカメラを表す優先情報を記憶する記憶部と、
前記優先情報に基づいて、前記車両が前記所定の区間を走行しているときに前記複数のカメラのうちの前記優先されるカメラを特定し、当該優先されるカメラにより生成された画像に対して実行される所定の処理に割り当てる演算リソースを、前記複数のカメラのうちの前記優先されるカメラ以外の他のカメラにより生成された画像に対して実行される前記所定の処理に割り当てる演算リソースよりも多く設定するリソース割り当て部と、
前記複数のカメラのうち、割り当てられた演算リソースが多いカメラほど前記所定の処理の演算量が多くなるように、前記複数のカメラのそれぞれにより生成された画像に対して前記所定の処理を実行する演算処理部と、
を有する画像処理装置。
続きを表示(約 690 文字)
【請求項2】
前記所定の区間は、当該区間における制限車速が所定の閾値以下である区間であり、前記複数のカメラは、前記車両の前方を撮影領域とする第1のカメラと、前記車両の前方を撮影領域とし、前記第1のカメラよりも広角な第2のカメラとを含み、前記リソース割り当て部は、前記車両が前記所定の区間を走行しているときに前記第1のカメラよりも前記第2のカメラを優先する、請求項1に記載の画像処理装置。
【請求項3】
前記所定の処理は所定の物体を検出する処理であり、
前記演算処理部は、前記優先されるカメラにより生成された画像を、前記所定の物体を検出するように予め学習された識別器に入力することで前記所定の物体を検出し、一方、前記他のカメラにより生成された画像をダウンサンプリングまたはクロッピングしてから前記識別器に入力することで前記所定の物体を検出する、請求項1または2に記載の画像処理装置。
【請求項4】
前記所定の処理は所定の物体を追跡する処理であり、
前記演算処理部は、前記優先されるカメラにより生成された画像に表された複数の前記所定の物体のうちの追跡する物体の数を、前記他のカメラにより生成された画像に表された複数の前記所定の物体のうちの追跡する物体の数よりも多く設定する、請求項1または2に記載の画像処理装置。
【請求項5】
前記演算処理部は、前記優先されるカメラについての前記所定の処理の実行周期を、前記他のカメラについての前記所定の処理の実行周期よりも短くする、請求項1または2に記載の画像処理装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車載のカメラにより得られた画像に対して所定の処理を実行する画像処理装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
複数の処理の実行が可能なシステムにおいて、優先度の高い方の処理の待機時間を短縮する技術が提案されている(特許文献1を参照)。
【0003】
上記の文献には、車両の走行状況に応じて、車両に設けられた複数のカメラのそれぞれから得られる画像に対して物体検出処理の優先度を設定し、優先する画像に対して先に演算リソースを割り当てて物体検出処理を実行することが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-11822号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
車両に搭載された複数のカメラのうち、検出対象となる物体をより適切に撮影できるカメラは、車両が走行する区間に応じて他のカメラと入れ替わることがある。
【0006】
そこで、本発明は、車載の複数のカメラのそれぞれから得られた画像に対して所定の処理を実行するための演算リソースを適切に設定することができる画像処理装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
一つの実施形態によれば、画像処理装置が提供される。この画像処理装置は、所定の区間において、車両の周囲の互いに異なる撮影領域を撮影する複数のカメラのうち、所定の区間において優先されるカメラを表す優先情報を記憶する記憶部と、優先情報に基づいて、車両が所定の区間を走行しているときに複数のカメラのうちの優先されるカメラを特定し、優先されるカメラにより生成された画像に対して実行される所定の処理に割り当てる演算リソースを、複数のカメラのうちの優先されるカメラ以外の他のカメラにより生成された画像に対して実行される所定の処理に割り当てる演算リソースよりも多く設定するリソース割り当て部と、複数のカメラのうち、割り当てられた演算リソースが多いカメラほど所定の処理の演算量が多くなるように、複数のカメラのそれぞれにより生成された画像に対して所定の処理を実行する演算処理部とを有する。
【0008】
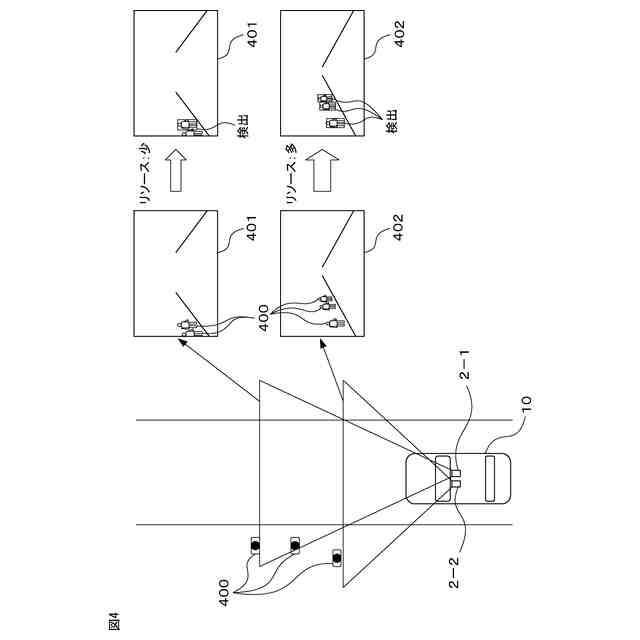
一つの実施形態において、所定の区間は、その区間における制限車速が所定の閾値以下である区間であり、複数のカメラは、車両の前方を撮影領域とする第1のカメラと、車両の前方を撮影領域とし、第1のカメラよりも広角な第2のカメラとを含み、リソース割り当て部は、車両が所定の区間を走行しているときに第1のカメラよりも第2のカメラを優先する。
【0009】
一つの実施形態において、所定の処理は所定の物体を検出する処理であり、演算処理部は、優先されるカメラにより生成された画像を、所定の物体を検出するように予め学習された識別器に入力することで所定の物体を検出し、一方、他のカメラにより生成された画像をダウンサンプリングまたはクロッピングしてから識別器に入力することで所定の物体を検出する。
【0010】
一つの実施形態において、所定の処理は所定の物体を追跡する処理であり、演算処理部は、優先されるカメラにより生成された画像に表された複数の所定の物体のうちの追跡する物体の数を、他のカメラにより生成された画像に表された複数の所定の物体のうちの追跡する物体の数よりも多く設定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
膜体
15日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
ロータ
2日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
自動車
7日前
トヨタ自動車株式会社
減圧弁
2日前
トヨタ自動車株式会社
モータ
8日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
モータ
6日前
トヨタ自動車株式会社
電動車両
21日前
トヨタ自動車株式会社
コネクタ
2日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
車両構造
12日前
トヨタ自動車株式会社
熱交換器
2日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
駆動装置
9日前
トヨタ自動車株式会社
ステータ
7日前
トヨタ自動車株式会社
蓄電装置
5日前
トヨタ自動車株式会社
充電設備
15日前
トヨタ自動車株式会社
コネクタ
15日前
トヨタ自動車株式会社
判定装置
7日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
電動車両
6日前
トヨタ自動車株式会社
評価装置
5日前
トヨタ自動車株式会社
電動車両
15日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
評価方法
15日前
トヨタ自動車株式会社
診断装置
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ