TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107973
公報種別
公開特許公報(A)
公開日
2025-07-22
出願番号
2024210000,2024084464
出願日
2024-12-03,2024-05-24
発明の名称
情報処理装置、加工サイクルの割り当て方法およびプログラム
出願人
DMG森精機株式会社
代理人
弁理士法人深見特許事務所
主分類
G05B
19/4097 20060101AFI20250714BHJP(制御;調整)
要約
【課題】加工サイクルの割り当てが簡易かつ適切に実行される情報処理装置、加工サイクルの割り当て方法およびプログラム、を提供する。
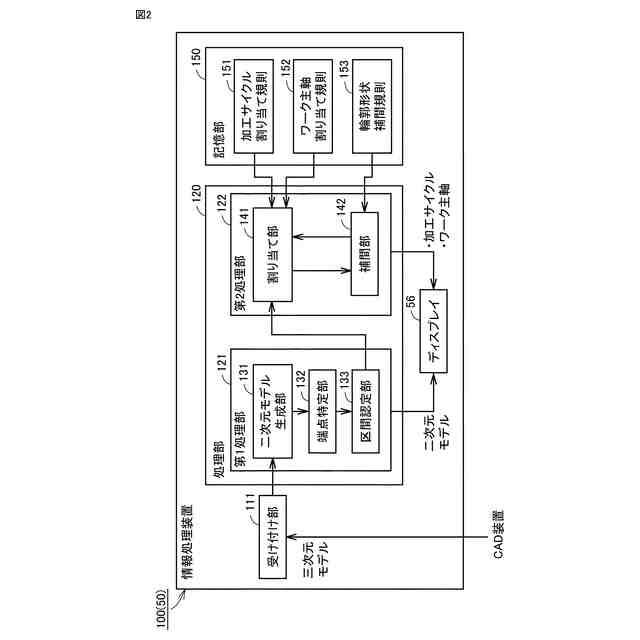
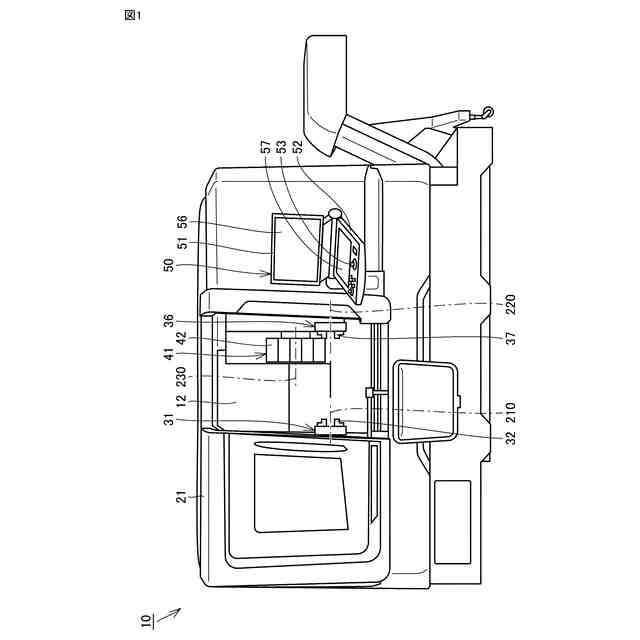
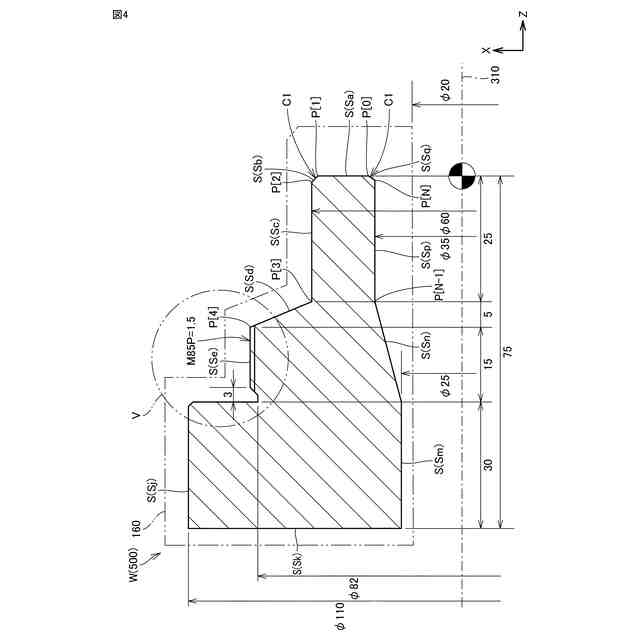
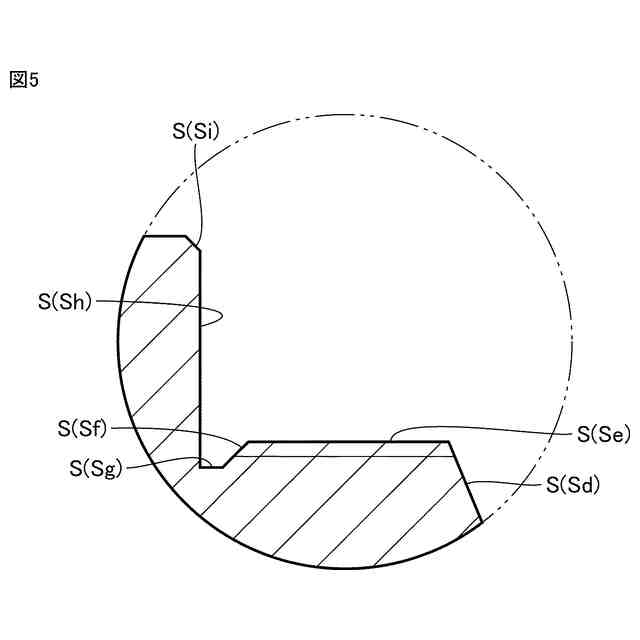
【解決手段】情報処理装置100は、加工により得られるワーク形状に対応し、所定軸を中心に延びるワークの三次元モデルを受け付ける受け付け部111と、三次元モデルを所定軸を含む平面により切断した二次元モデルを生成するともに、二次元モデルに表われるワークの輪郭形状に基づいて、ワークに加工サイクルを割り当てる処理部120とを備える。処理部120は、加工サイクルとして特定の加工が割り当てられた特定の区間でワークの輪郭形状を補間し、補間後のワークの補間後輪郭形状に、特定の加工と異なる加工を割り当てる。
【選択図】図2
特許請求の範囲
【請求項1】
加工により得られるワーク形状に対応し、所定軸を中心に延びるワークの三次元モデルを受け付ける受け付け部と、
前記三次元モデルを前記所定軸を含む平面により切断した二次元モデルを生成するともに、前記二次元モデルに表われる前記ワークの輪郭形状に基づいて、前記ワークに加工サイクルを割り当てる処理部とを備え、
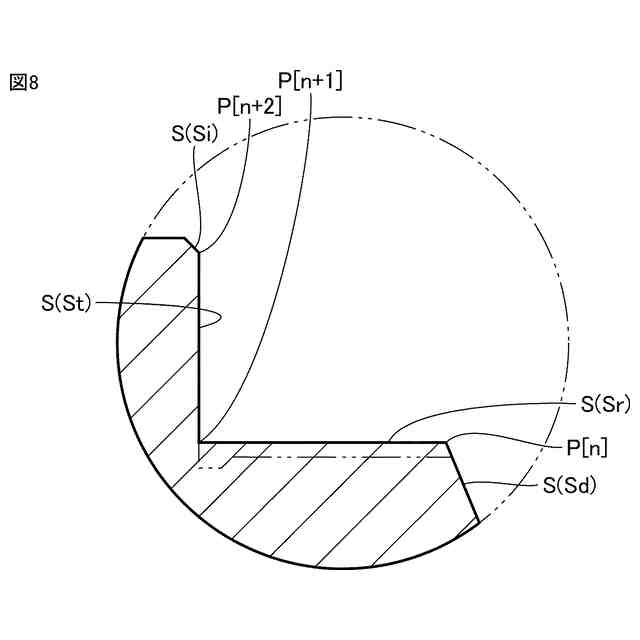
前記処理部は、前記加工サイクルとして特定の加工が割り当てられた特定の区間で前記ワークの輪郭形状を補間し、補間後の前記ワークの補間後輪郭形状に、前記特定の加工と異なる加工を割り当てる、情報処理装置。
続きを表示(約 1,000 文字)
【請求項2】
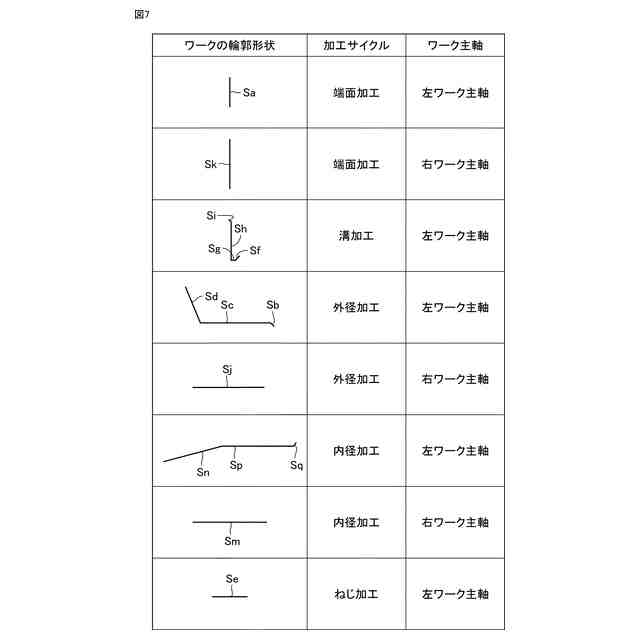
前記特定の加工は、溝加工またはねじ加工であり、
前記特定の加工と異なる加工は、外径加工、内径加工または端面加工である、請求項1に記載の情報処理装置。
【請求項3】
前記処理部は、前記ワークの輪郭形状に含まれる端点を特定し、隣接する端点の区間毎に前記加工サイクルを割り当てる、請求項1または2に記載の情報処理装置。
【請求項4】
前記処理部は、前記加工サイクルが割り当てられた各区間の加工時にワークを保持するワーク主軸として、前記所定軸を中心にワークを回転させることが可能な第1ワーク主軸と、前記所定軸の軸方向において前記第1ワーク主軸と対向して配置され、前記所定軸を中心にワークを回転させることが可能な第2ワーク主軸とのいずれか一方を割り当てる、請求項1または2に記載の情報処理装置。
【請求項5】
加工により得られるワーク形状に対応し、所定軸を中心に延びるワークの三次元モデルから、前記三次元モデルを前記所定軸を含む平面により切断した二次元モデルを生成するステップと、
前記二次元モデルに表われる前記ワークの輪郭形状に基づいて、前記ワークに加工サイクルを割り当てるステップとを備え、
前記ワークに加工サイクルを割り当てるステップは、前記加工サイクルとして特定の加工が割り当てられた特定の区間で前記ワークの輪郭形状を補間し、補間後の前記ワークの補間後輪郭形状に、前記特定の加工と異なる加工を割り当てるステップを含む、加工サイクルの割り当て方法。
【請求項6】
ワークに加工サイクルを割り当てるためのコンピュータによって実行されるプログラムであって、
前記プログラムは、前記コンピュータに、
加工により得られるワーク形状に対応し、所定軸を中心に延びるワークの三次元モデルから、前記三次元モデルを前記所定軸を含む平面により切断した二次元モデルを生成するステップと、
前記二次元モデルに表われる前記ワークの輪郭形状に基づいて、前記ワークに加工サイクルを割り当てるステップとを実行させ、
前記ワークに加工サイクルを割り当てるステップは、前記加工サイクルとして特定の加工が割り当てられた特定の区間で前記ワークの輪郭形状を補間し、補間後の前記ワークの補間後輪郭形状に、前記特定の加工と異なる加工を割り当てるステップを含む、プログラム。
発明の詳細な説明
【技術分野】
【0001】
この発明は、情報処理装置、加工サイクルの割り当て方法およびプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
たとえば、特開2014-16982号公報(特許文献1)では、加工サイクル指令を含む加工プログラムの加工動作の動画を表示する際に、加工サイクルを構成するブロック(移動指令)の確認を可能にするためのシミュレーション装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2014-16982号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の特許文献1に開示されるように、ワークを加工するためのNC(Numerical control)プログラムを作成する場合に、たとえば、ワーク加工のプロセスに、外径加工、内径加工、端面加工、溝加工またはねじ加工等の加工サイクル(旋削サイクル)を割り当て、続いて、これら加工サイクルを固定サイクルとして指令するコードを用いて、NCプログラムを作成することが行なわれている。
【0005】
しかしながら、上記の加工サイクルの割り当ては、オペレータの手作業により行なわれているため、加工サイクルの割り当てに多大な時間を要したり、加工サイクルが適切に割り当てられなかったりする問題がある。
【0006】
この発明の目的は、加工サイクルの割り当てが簡易かつ適切に実行される情報処理装置、加工サイクルの割り当て方法およびプログラムを提供することである。
【課題を解決するための手段】
【0007】
この発明に従った情報処理装置は、加工により得られるワーク形状に対応し、所定軸を中心に延びるワークの三次元モデルを受け付ける受け付け部と、三次元モデルを所定軸を含む平面により切断した二次元モデルを生成するともに、二次元モデルに表われるワークの輪郭形状に基づいて、ワークに加工サイクルを割り当てる処理部とを備える。処理部は、加工サイクルとして特定の加工が割り当てられた特定の区間でワークの輪郭形状を補間し、補間後のワークの補間後輪郭形状に、特定の加工と異なる加工を割り当てる。
【0008】
この発明に従った加工サイクルの割り当て方法は、加工により得られるワーク形状に対応し、所定軸を中心に延びるワークの三次元モデルから、三次元モデルを所定軸を含む平面により切断した二次元モデルを生成するステップと、二次元モデルに表われるワークの輪郭形状に基づいて、ワークに加工サイクルを割り当てるステップとを備える。ワークに加工サイクルを割り当てるステップは、加工サイクルとして特定の加工が割り当てられた特定の区間でワークの輪郭形状を補間し、補間後のワークの補間後輪郭形状に、特定の加工と異なる加工を割り当てるステップを含む。
【0009】
この発明に従ったプログラムは、ワークに加工サイクルを割り当てるためのコンピュータによって実行されるプログラムである。プログラムは、コンピュータに、加工により得られるワーク形状に対応し、所定軸を中心に延びるワークの三次元モデルから、三次元モデルを所定軸を含む平面により切断した二次元モデルを生成するステップと、二次元モデルに表われるワークの輪郭形状に基づいて、ワークに加工サイクルを割り当てるステップとを実行させる。ワークに加工サイクルを割り当てるステップは、加工サイクルとして特定の加工が割り当てられた特定の区間でワークの輪郭形状を補間し、補間後のワークの補間後輪郭形状に、特定の加工と異なる加工を割り当てるステップを含む。
【発明の効果】
【0010】
この発明に従えば、加工サイクルの割り当てが簡易かつ適切に実行される情報処理装置、加工サイクルの割り当て方法およびプログラムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
DMG森精機株式会社
加工システム
11日前
DMG森精機株式会社
工作機械
21日前
DMG森精機株式会社
付加加工用ヘッドおよび加工機械
29日前
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社カネカ
製造システム
25日前
オムロン株式会社
スレーブ装置
1日前
株式会社FUJI
加工機械ライン
2か月前
愛知製鋼株式会社
車両用システム
1か月前
ローム株式会社
基準電圧源
22日前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
11日前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
29日前
トヨタ自動車株式会社
移動制御システム
1か月前
トヨタ自動車株式会社
減圧弁
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
キヤノン株式会社
配送システム
25日前
マーク ヘイリー
消防ロボット
2か月前
株式会社ダイフク
物品搬送設備
11日前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
クラッチペダル
1か月前
株式会社TMEIC
安全性診断装置
5日前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
株式会社テイエルブイ
減圧弁の制御装置
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
株式会社CAOS
移動体の制御システム
21日前
アズビル株式会社
制御システムおよび制御方法
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
ローム株式会社
電源回路用の電子負荷装置
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ