TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107874
公報種別
公開特許公報(A)
公開日
2025-07-22
出願番号
2024001398
出願日
2024-01-09
発明の名称
画像復号装置、画像復号方法及びプログラム
出願人
KDDI株式会社
代理人
個人
主分類
H04N
19/70 20140101AFI20250714BHJP(電気通信技術)
要約
【課題】符号化効率を向上する画像復号装置、画像復号方法及びプログラムを提供する。
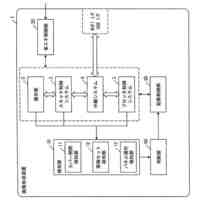
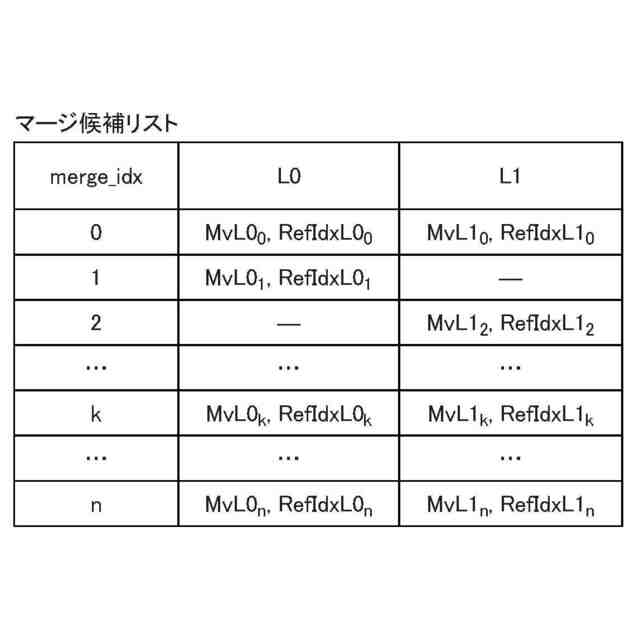
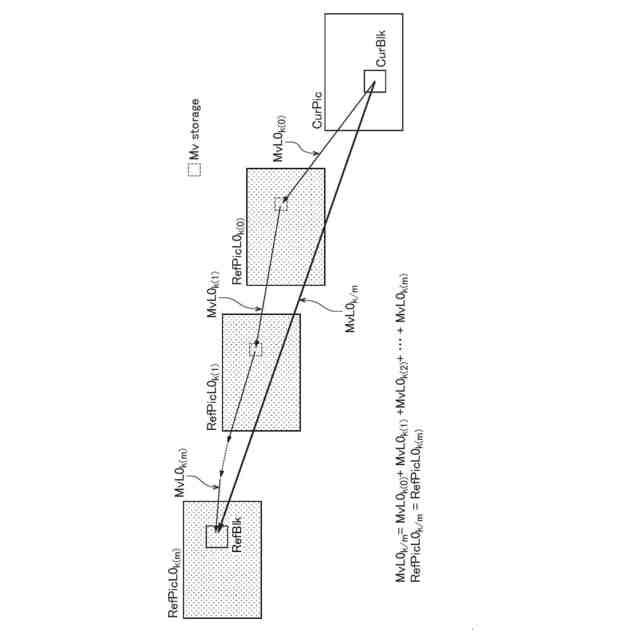
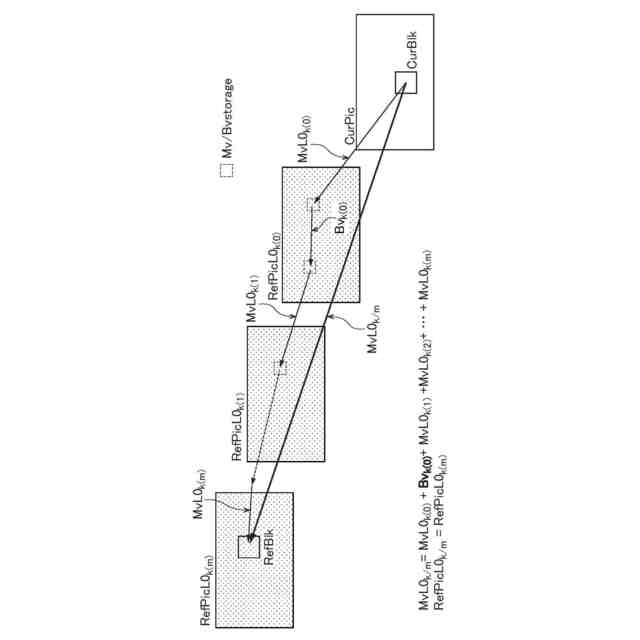
【解決手段】画像復号装置200において、インター予測部205は、動きベクトルの候補を格納するマージ候補リストに格納されている復号対象ブロックに空間的又は時間的に隣接又は近接する位置の動きベクトルに対して再帰的に復号ピクチャバッファに蓄積されている動きベクトルを探索して導出した全ての動きベクトルを加算することで、数珠繋ぎ動きベクトルを生成し、数珠繋ぎ動きベクトルを復号対象ブロックの動きベクトルの候補として導出する数珠繋ぎ動きベクトル予測を行い、復号部から送られる時間動きベクトル予測の適用可不可を制御する制御情報に基づき、数珠繋ぎ動きベクトル予測の適用可不可を制御する。
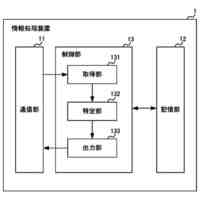
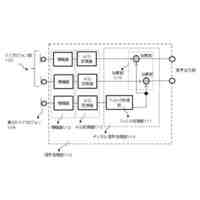
【選択図】図1
特許請求の範囲
【請求項1】
画像復号装置であって、
符号情報を可変長復号して量子化値及び制御情報を出力する復号部と、
前記量子化値を逆量子化して変換係数を出力する逆量子化部と、
前記変換係数を逆変換して予測残差画素を出力する逆変換部と、
前記制御情報及び復号済み画素からイントラ予測画素を生成するイントラ予測部と、
前記復号済み画素を蓄積する復号ピクチャバッファと、
前記制御情報及び前記復号ピクチャバッファに蓄積されている前記復号済み画素からインター予測画素を生成するインター予測部と、
前記予測残差画素に対して前記イントラ予測画素と及び前記インター予測画素の少なくとも一方を加算して前記復号済み画素を生成する加算器とを備え、
前記インター予測部は、動きベクトルの候補を格納するマージ候補リストに格納されている復号対象ブロックに空間的又は時間的に隣接又は近接する位置の動きベクトルに対して再帰的に前記復号ピクチャバッファに蓄積されている動きベクトルを探索して導出した全ての動きベクトルを加算することで、数珠繋ぎ動きベクトルを生成し、前記数珠繋ぎ動きベクトルを前記復号対象ブロックの動きベクトルの候補として導出する数珠繋ぎ動きベクトル予測を行い、
前記インター予測部は、前記復号部から送られる時間動きベクトル予測の適用可不可を制御する制御情報に基づき、前記数珠繋ぎ動きベクトル予測の適用可不可を制御することを特徴とする画像復号装置。
続きを表示(約 2,100 文字)
【請求項2】
前記インター予測部は、前記復号部から送られる復号対象シーケンス単位の時間動きベクトル予測の適用可不可を制御する第1制御情報に基づき、前記復号対象ブロックに対する前記数珠繋ぎ動きベクトル予測の適用可不可を制御することを特徴とするが請求項1に記載の画像復号装置。
【請求項3】
前記インター予測部は、
前記第1制御情報が、時間動きベクトル予測を適用可能と特定する場合、前記復号対象ブロックに対する数珠繋ぎ動きベクトル予測を適用可能と特定し、
前記第1制御情報が、時間動きベクトル予測を適用不可と特定する場合、前記復号対象ブロックに対する数珠繋ぎ動きベクトル予測を適用不可と特定することを特徴とするが請求項2に記載の画像復号装置。
【請求項4】
前記インター予測部は、前記復号部から送られる復号対象ピクチャ単位の時間動きベクトル予測の適用可不可を制御する第2制御情報に基づき、前記復号対象ブロックに対する前記数珠繋ぎ動きベクトル予測の適用可不可を制御することを特徴とする請求項1に記載の画像復号装置。
【請求項5】
前記インター予測部は、
前記第2制御情報が、時間動きベクトル予測を適用可能と特定する場合、前記復号対象ブロックに対する前記数珠繋ぎ動きベクトル予測を適用可能と特定し、
前記第2制御情報が、時間動きベクトル予測を適用不可と特定する場合、前記復号対象ブロックに対する前記数珠繋ぎ動きベクトル予測を適用不可と特定することを特徴とする請求項4に記載の画像復号装置。
【請求項6】
前記インター予測部は、前記復号部から送られる復号対象シーケンス単位の時間動きベクトル予測の適用可不可を制御する第1制御情報に基づき、前記復号対象シーケンス単位或いは前記復号対象シーケンスより小さい復号対象の単位で、前記数珠繋ぎ動きベクトル予測の適用可不可を制御することを特徴とする請求項1に記載の画像復号装置。
【請求項7】
前記インター予測部は、前記復号部から送られる復号対象ピクチャ単位の時間動きベクトル予測の適用可不可を制御する第2制御情報に基づき、前記復号対象ピクチャ単位或いは前記復号対象ピクチャより小さい復号対象の単位で、前記数珠繋ぎ動きベクトル予測の適用可不可を制御することを特徴とする請求項1に記載の画像復号装置。
【請求項8】
画像復号装置であって、
符号情報を可変長復号して量子化値及び制御情報を出力する復号部と、
前記量子化値を逆量子化して変換係数を出力する逆量子化部と、
前記変換係数を逆変換して予測残差画素を出力する逆変換部と、
前記制御情報及び復号済み画素からイントラ予測画素を生成するイントラ予測部と、
前記復号済み画素を蓄積する復号ピクチャバッファと、
前記制御情報及び前記復号ピクチャバッファに蓄積されている前記復号済み画素からインター予測画素を生成するインター予測部と、
前記予測残差画素に対して前記イントラ予測画素と及び前記インター予測画素の少なくとも一方を加算して前記復号済み画素を生成する加算器とを備え、
前記インター予測部は、動きベクトルの候補を格納するマージ候補リストに格納されている復号対象ブロックに空間的又は時間的に隣接又は近接する位置の動きベクトルに対して再帰的に前記復号ピクチャバッファに蓄積されている動きベクトルを探索して導出した全ての動きベクトルを加算することで、数珠繋ぎ動きベクトルを生成し、前記数珠繋ぎ動きベクトルを前記復号対象ブロックの動きベクトルの候補として導出する数珠繋ぎ動きベクトル予測を行い、
前記復号部は、時間動きベクトル予測の適用可不可を制御する制御情報に基づいて、前記数珠繋ぎ動きベクトル予測の適用可不可を制御することを特徴とする画像復号装置。
【請求項9】
前記復号部は、
復号対象シーケンス単位で時間動きベクトル予測の適用可不可を制御する第1シンタックスが1である場合、前記復号対象シーケンス単位で前記数珠繋ぎ動きベクトル予測の適用可不可を制御するシンタックスを復号し、
前記第1シンタックスが1でない場合、前記復号対象シーケンス単位で数珠繋ぎ動きベクトル予測の適用可不可を制御するシンタックスを復号しないとすることを特徴とする請求項8に記載の画像復号装置。
【請求項10】
前記復号部は、
前記第1シンタックスの値が1の場合、前記復号対象シーケンス単位で時間動きベクトル予測を適用可能と特定し、
前記第1シンタックスの値が0の場合、前記復号対象シーケンス単位で時間動きベクトル予測を適用不可と特定し、
前記第1シンタックスが復号されていない場合、前記第1シンタックスの値を0と推定することを特徴とする請求項9に記載の画像復号装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像復号装置、画像復号方法及びプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
非特許文献1及び非特許文献2では、インター予測について開示されている。
【0003】
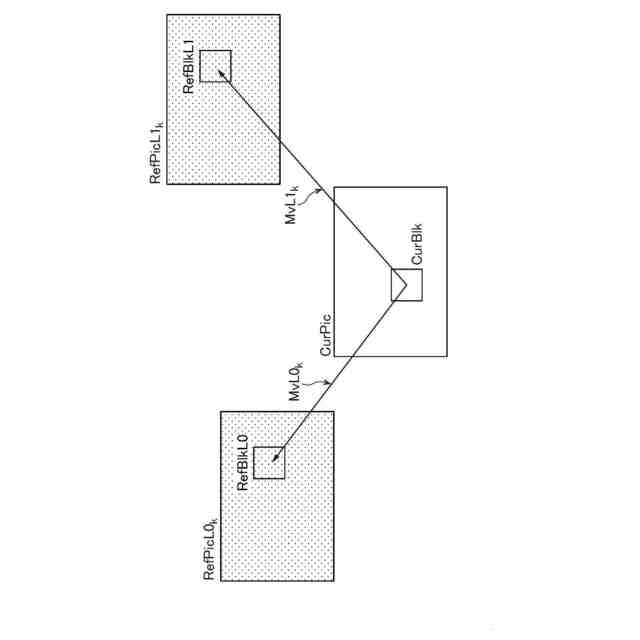
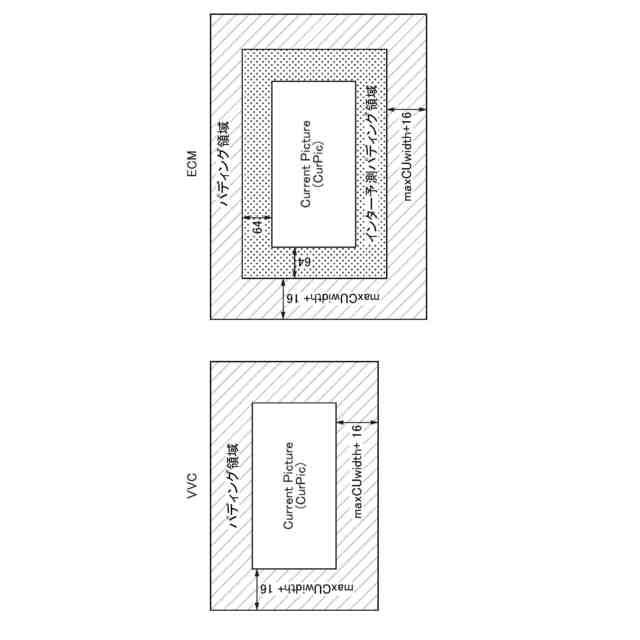
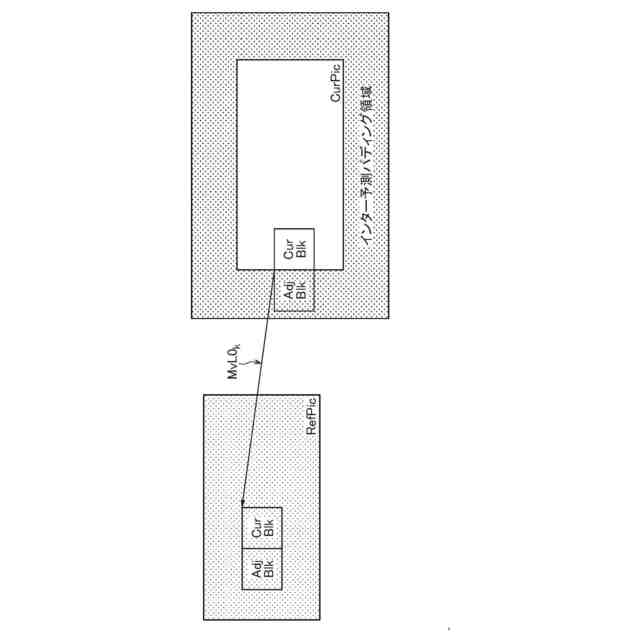
インター予測は、復号対象ブロックの予測画素を、復号対象ピクチャとは異なる復号済みピクチャ(参照ピクチャ)内の復号済み画素(参照画素)から生成する。
【0004】
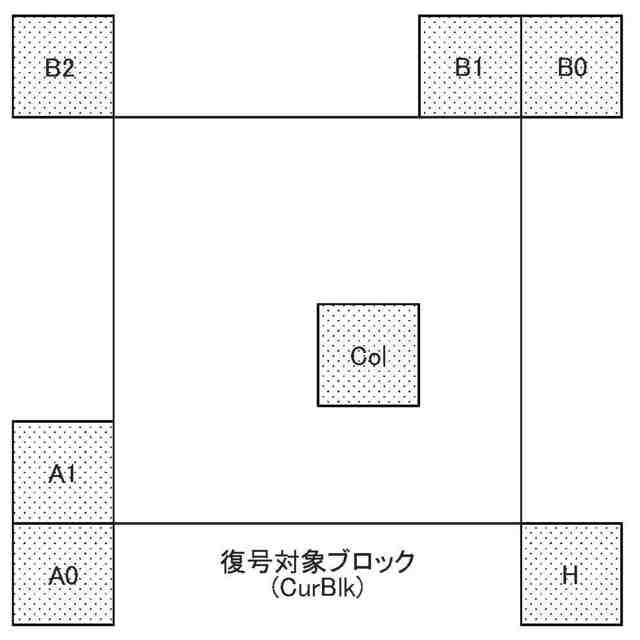
また、インター予測は、制御情報を用いて、復号対象ブロックの予測画素の生成に必要な復号対象ブロックの動きベクトルを、復号対象ブロックに空間的又は時間的に隣接又は近接する位置の複数の動きベクトルの候補から選択する。
【先行技術文献】
【非特許文献】
【0005】
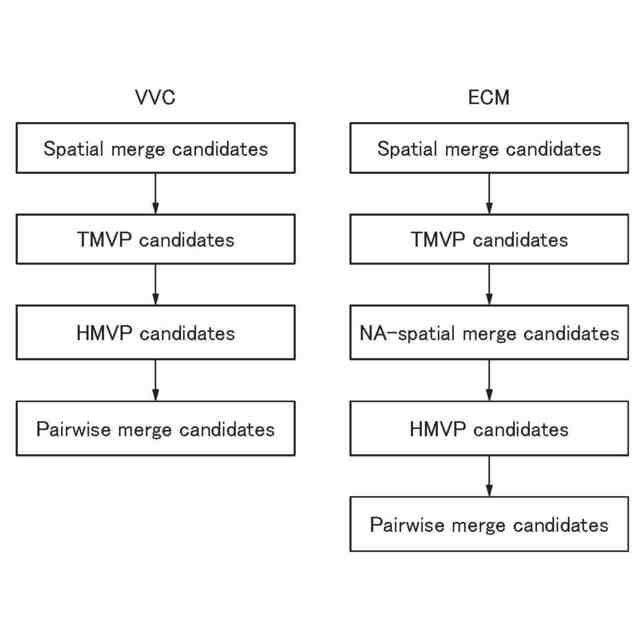
ITU-T H.266/VVC
M.Coban等、Algorithm description of Enhanced Compression Model 10(ECM 10)、JVET-AE2025、2023年
【発明の概要】
【発明が解決しようとする課題】
【0006】
非特許文献1及び非特許文献2におけるインター予測で選択可能な動きベクトルの候補は、復号対象ブロックに空間的又は時間的に隣接又は近接する位置の動きベクトルに限定されているため、符号化効率に改善の余地があるという問題点があった。
【0007】
そこで、本発明は、上述の課題に鑑みてなされたものであり、符号化効率の高い画像復号装置、画像復号方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
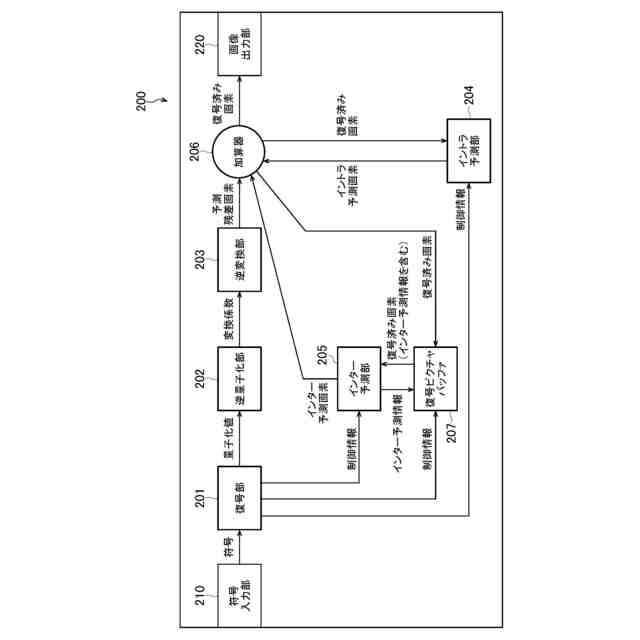
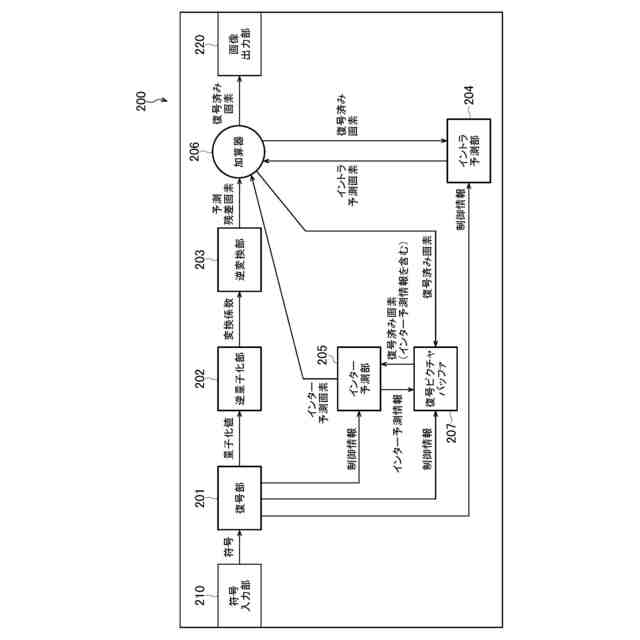
本発明の第1の特徴は、画像復号装置であって、符号情報を可変長復号して量子化値及び制御情報を出力する復号部と、前記量子化値を逆量子化して変換係数を出力する逆量子化部と、前記変換係数を逆変換して予測残差画素を出力する逆変換部と、前記制御情報及び復号済み画素からイントラ予測画素を生成するイントラ予測部と、前記復号済み画素を蓄積する復号ピクチャバッファと、前記制御情報及び前記復号ピクチャバッファに蓄積されている前記復号済み画素からインター予測画素を生成するインター予測部と、前記予測残差画素に対して前記イントラ予測画素と及び前記インター予測画素の少なくとも一方を加算して前記復号済み画素を生成する加算器とを備え、前記インター予測部は、動きベクトルの候補を格納するマージ候補リストに格納されている復号対象ブロックに空間的又は時間的に隣接又は近接する位置の動きベクトルに対して再帰的に前記復号ピクチャバッファに蓄積されている動きベクトルを探索して導出した全ての動きベクトルを加算することで、数珠繋ぎ動きベクトルを生成し、前記数珠繋ぎ動きベクトルを前記復号対象ブロックの動きベクトルの候補として導出する数珠繋ぎ動きベクトル予測を行い、前記インター予測部は、前記復号部から送られる時間動きベクトル予測の適用可不可を制御する制御情報に基づき、前記数珠繋ぎ動きベクトル予測の適用可不可を制御することを要旨とする。
【0009】
本発明の第2の特徴は、画像復号装置であって、符号情報を可変長復号して量子化値及び制御情報を出力する復号部と、前記量子化値を逆量子化して変換係数を出力する逆量子化部と、前記変換係数を逆変換して予測残差画素を出力する逆変換部と、前記制御情報及び復号済み画素からイントラ予測画素を生成するイントラ予測部と、前記復号済み画素を蓄積する復号ピクチャバッファと、前記制御情報及び前記復号ピクチャバッファに蓄積されている前記復号済み画素からインター予測画素を生成するインター予測部と、前記予測残差画素に対して前記イントラ予測画素と及び前記インター予測画素の少なくとも一方を加算して前記復号済み画素を生成する加算器とを備え、前記インター予測部は、動きベクトルの候補を格納するマージ候補リストに格納されている復号対象ブロックに空間的又は時間的に隣接又は近接する位置の動きベクトルに対して再帰的に前記復号ピクチャバッファに蓄積されている動きベクトルを探索して導出した全ての動きベクトルを加算することで、数珠繋ぎ動きベクトルを生成し、前記数珠繋ぎ動きベクトルを前記復号対象ブロックの動きベクトルの候補として導出する数珠繋ぎ動きベクトル予測を行い、前記復号部は、時間動きベクトル予測の適用可不可を制御する制御情報に基づいて、前記数珠繋ぎ動きベクトル予測の適用可不可を制御することを要旨とする。
【0010】
本発明の第3の特徴は、画像復号装置であって、符号情報を可変長復号して量子化値及び制御情報を出力する復号部と、前記量子化値を逆量子化して変換係数を出力する逆量子化部と、前記変換係数を逆変換して予測残差画素を出力する逆変換部と、前記制御情報及び復号済み画素からイントラ予測画素を生成するイントラ予測部と、前記復号済み画素を蓄積する復号ピクチャバッファと、前記制御情報及び前記復号ピクチャバッファに蓄積されている前記復号済み画素からインター予測画素を生成するインター予測部と、前記予測残差画素に対して前記イントラ予測画素と及び前記インター予測画素の少なくとも一方を加算して前記復号済み画素を生成する加算器とを備え、前記インター予測部は、動きベクトルの候補を格納するマージ候補リストに格納されている復号対象ブロックに空間的又は時間的に隣接又は近接する位置の動きベクトルに対して再帰的に前記復号ピクチャバッファに蓄積されている動きベクトルを探索して導出した全ての動きベクトルを加算することで、数珠繋ぎ動きベクトルを生成し、前記数珠繋ぎ動きベクトルを前記復号対象ブロックの動きベクトルの候補として導出する数珠繋ぎ動きベクトル予測を行い、前記インター予測部は、前記数珠繋ぎ動きベクトル予測における再帰的な動きベクトルの探索を、前記復号対象ブロックの参照ピクチャリストに含まれる少なくとも1つ以上の参照ピクチャのみに制限することを要旨とする。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
KDDI株式会社
情報処理装置及び情報処理方法
7日前
KDDI株式会社
情報処理装置及び情報処理方法
13日前
KDDI株式会社
ネットワーク制御装置及びプログラム
13日前
KDDI株式会社
通信装置、無線デバイス及びプログラム
14日前
KDDI株式会社
中継装置、中継方法及び中継プログラム
6日前
KDDI株式会社
認証装置、認証方法及び認証プログラム
6日前
KDDI株式会社
通信装置、無線デバイス及びプログラム
14日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
14日前
KDDI株式会社
情報処理装置、情報処理方法及び情報処理システム
11日前
KDDI株式会社
移動通信ネットワークのサーバ装置及び呼処理システム
11日前
KDDI株式会社
移動通信ネットワークのネットワークノード及びプログラム
5日前
KDDI株式会社
移動通信ネットワークのネットワークノード、サーバ及びプログラム
5日前
KDDI株式会社
移動通信ネットワークのネットワークノード、サーバ及びプログラム
5日前
KDDI株式会社
情報処理装置及び情報処理方法
13日前
KDDI株式会社
情報処理装置及び情報処理方法
7日前
KDDI株式会社
情報処理装置及び情報処理方法
7日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
14日前
KDDI株式会社
システム効率を改善する無線品質の測定及び報告のための端末装置、基地局装置、制御方法、及びプログラム
7日前
KDDI株式会社
システム効率を改善する無線品質の測定及び報告のための端末装置、基地局装置、制御方法、及びプログラム
7日前
KDDI株式会社
システム効率を改善する無線品質の測定及び報告のための端末装置、基地局装置、制御方法、及びプログラム
7日前
KDDI株式会社
ハンドオーバの効率を改善する無線品質の測定及び報告のための端末装置、基地局装置、制御方法、及びプログラム
7日前
個人
店内配信予約システム
2か月前
WHISMR合同会社
収音装置
5日前
サクサ株式会社
中継装置
2か月前
キヤノン株式会社
撮像装置
20日前
キヤノン株式会社
撮像装置
2か月前
キヤノン株式会社
電子機器
2か月前
ヤマハ株式会社
信号処理装置
2か月前
日本精機株式会社
画像投映システム
2か月前
キヤノン電子株式会社
モバイル装置
2か月前
株式会社リコー
画像形成装置
15日前
株式会社リコー
画像形成装置
19日前
キヤノン電子株式会社
画像読取装置
6日前
株式会社リコー
画像形成装置
1か月前
ブラザー工業株式会社
読取装置
1か月前
株式会社ニコン
撮像装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ