TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099376
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216006
出願日
2023-12-21
発明の名称
自動搬送車管理装置、自動搬送車管理方法、および自動搬送車管理プログラム
出願人
株式会社東芝
代理人
弁理士法人鈴榮特許綜合事務所
主分類
B65G
1/137 20060101AFI20250626BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】倉庫の稼働状況および管理エリアの有無に応じて、自動搬送車の運行管理方法を変更することができる技術を提供すること。
【解決手段】実施形態に係る自動搬送車管理装置は、倉庫内の自動搬送車が稼働している環境に関連する環境情報を記憶する稼働状況記憶部と、経路計画に従って、任意の地点における自動搬送車の通過順序を事前に決定した通過順序を遵守する第1の運行管理方法で管理し、環境情報により算出される稼働規模が所定の閾値以下であるかどうかを判定し、閾値以下である場合、第1の運行管理方法で管理し、閾値を超える場合、自動搬送車の通過順序を事前決定せず、競合が発生した場合に競合を解消するために通過順序または経路計画を更新する第2の運行管理方法で管理する運行計画部と、運行計画部により定められた運行管理方法で自動搬送車を制御する走行制御部と、を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
倉庫内の自動搬送車が稼働している環境に関連する環境情報を記憶する稼働状況記憶部と、
前記自動搬送車が目的地に移動するまでの経路計画に従って、任意の地点における前記自動搬送車の通過順序を事前に決定した通過順序を遵守する第1の運行管理方法で管理し、前記環境情報により算出される稼働規模が所定の閾値以下であるかどうかを判定し、前記閾値以下であると判定した場合、前記第1の運行管理方法で管理し、前記閾値を超えると判定した場合、前記自動搬送車の通過順序を事前決定せず、競合が発生した場合に競合を解消するために通過順序または経路計画を更新する第2の運行管理方法で管理する運行計画部と、
前記運行計画部により定められた運行管理方法で前記自動搬送車を制御する走行制御部と、
を備える、自動搬送車管理装置。
続きを表示(約 1,300 文字)
【請求項2】
前記運行計画部は、前記第2の運行管理方法で管理している間に、経路計画の再計画を実施する場合には、前記第1の運行管理方法で管理する、
請求項1に記載の自動搬送車管理装置。
【請求項3】
前記走行制御部は、前記第1の運行管理方法で管理している現在の自動搬送車の位置情報に基づいて、前記経路計画との乖離が発生したかどうかを判定し、前記乖離が発生した場合、前記経路計画を再計画する依頼を前記運行計画部に出力する、
請求項1または2に記載の自動搬送車管理装置。
【請求項4】
前記走行制御部は、前記第1の運行管理方法で管理している現在の自動搬送車の任意の地点における前記通過順序に基づいて、前記通過順序との乖離が発生したかどうかを判定し、前記乖離が発生した場合、経路計画を再計画する依頼を前記運行計画部に出力する、
請求項1または2に記載の自動搬送車管理装置。
【請求項5】
前記走行制御部は、前記第2の運行管理方法で管理している現在の自動搬送車の位置情報およびマップ情報に基づいて、前記自動搬送車が通過順序が設定された管理エリアに入場するかどうかを判定し、前記管理エリアに入場すると判定した場合、前記自動搬送車の運行管理方法を前記第1の運行管理方法に更新し、前記経路計画を再計画する依頼を前記運行計画部に出力する、
請求項1または2に記載の自動搬送車管理装置。
【請求項6】
前記走行制御部は、前記第2の運行管理方法で管理している現在の自動搬送車の位置情報に基づいて、自動搬送車同士の競合の可能性があるかどうかを判定し、前記競合の可能性があると判定した場合、前記競合の可能性がある前記自動搬送車の周りを含む判定領域に存在する自動搬送車の数が所定の閾値以下であるかどうかを判定する、
請求項1に記載の自動搬送車管理装置。
【請求項7】
前記自動搬送車の数が前記閾値以下であると判定した場合、前記走行制御部は、前記競合の可能性がある前記自動搬送車のうちの1台の経路または通過順序で対処可能かどうか判定し、対処可能な場合、前記1台の自動搬送車の経路を更新する、
請求項6に記載の自動搬送車管理装置。
【請求項8】
前記自動搬送車の数が前記閾値以下であると判定した場合、前記走行制御部は、前記競合の可能性がある前記自動搬送車のうちの1台の経路または通過順序で対処可能かどうか判定し、対処できない場合、前記経路計画を再計画する依頼を前記運行計画部に出力する、
請求項6に記載の自動搬送車管理装置。
【請求項9】
前記自動搬送車の数が前記閾値より大きいと判定した場合、前記走行制御部は、前記判定領域を動的管理エリアとして設定する、
請求項6に記載の自動搬送車管理装置。
【請求項10】
前記自動搬送車の数が前記閾値より大きいと判定した場合、前記走行制御部は、前記判定領域に隣接するノードを包含するエリアを動的管理エリアとして設定する、
請求項6に記載の自動搬送車管理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、自動搬送車管理装置、自動搬送車管理方法、および自動搬送車管理プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
倉庫などに導入される自動搬送車管理システムでは、商品が保管されている棚をできるだけ早く安全に搬送することが求められる。自動搬送車管理システムでは、自動搬送車(例えば、AGV(Automated Guided Vehicle))同士での衝突を回避するために、事前の計画では予定されていない緊急停止が実行されることがある。緊急停止が発生すると、棚が倒壊するリスクまたは搬送が遅れるリスクがある。
【0003】
例えば、特許文献1では、複数の移動体が通過する可能性のある領域に対して、移動体がその領域を通過する順序を決定し、移動体が決定された通過順序を守るように通過させることで、移動体同士の競合を防ぎ、円滑な運行を実現する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-166737号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の発明では、導入される環境の規模が拡大すると移動体の数および移動距離が増加するため、計画の更新に時間が掛かる恐れがある。計画の更新に時間が掛かると、 後からある領域を通過する移動体は、通過順序が前の移動体を待ち続ける必要があるという問題がある。
【0006】
また、自動搬送車管理システムにおいて、人間と機械が協同して働いているため、事前に計画した順序通りに物事が進まないという問題もある。
【0007】
この発明は、上記事情に着目してなされたもので、その目的とするところは、倉庫の稼働状況および管理エリアの有無に応じて、自動搬送車の運行管理方法を変更することができる技術を提供することにある。
【課題を解決するための手段】
【0008】
実施形態に係る自動搬送車管理装置は、倉庫内の自動搬送車が稼働している環境に関連する環境情報を記憶する稼働状況記憶部と、前記自動搬送車が目的地に移動するまでの経路計画に従って、任意の地点における前記自動搬送車の通過順序を事前に決定した通過順序を遵守する第1の運行管理方法で管理し、前記環境情報により算出される稼働規模が所定の閾値以下であるかどうかを判定し、前記閾値以下であると判定した場合、前記第1の運行管理方法で管理し、前記閾値を超えると判定した場合、前記自動搬送車の通過順序を事前決定せず、競合が発生した場合に競合を解消するために通過順序または経路計画を更新する第2の運行管理方法で管理する運行計画部と、前記運行計画部により定められた運行管理方法で前記自動搬送車を制御する走行制御部と、を備えるものである。
【図面の簡単な説明】
【0009】
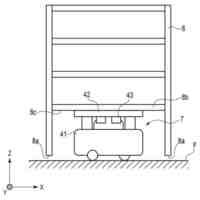
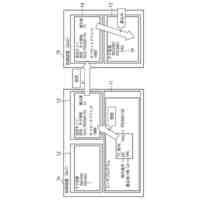
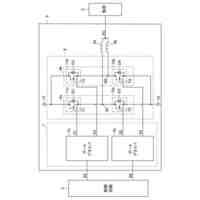
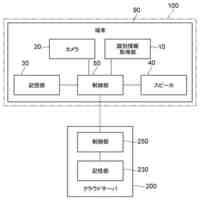
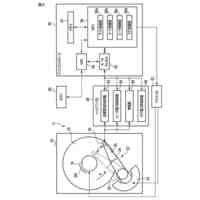
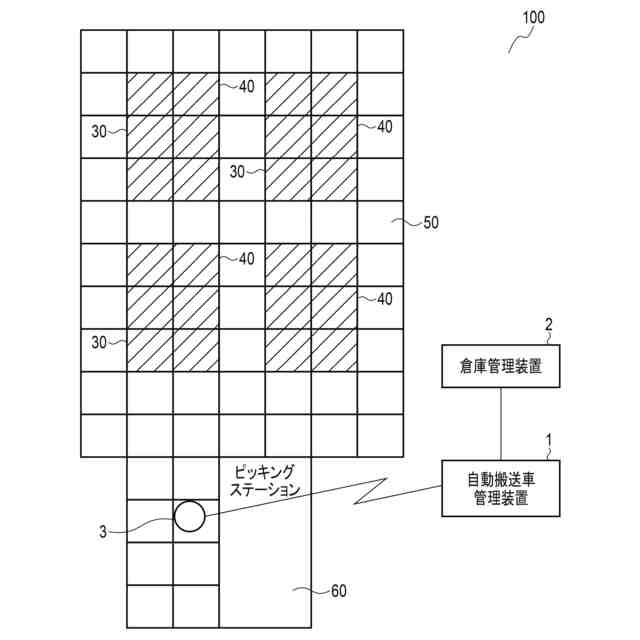
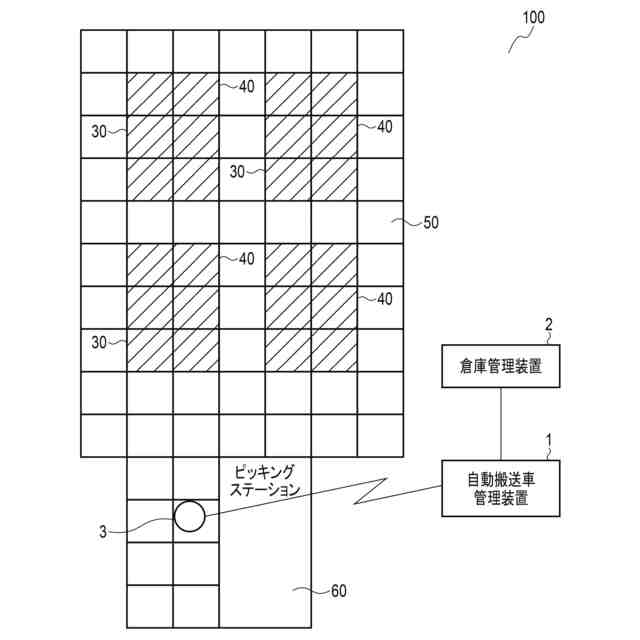
図1は、実施形態に係る自動搬送車管理システムの構成例を概念的に示す図である。
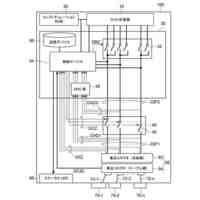
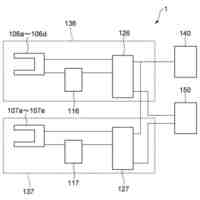
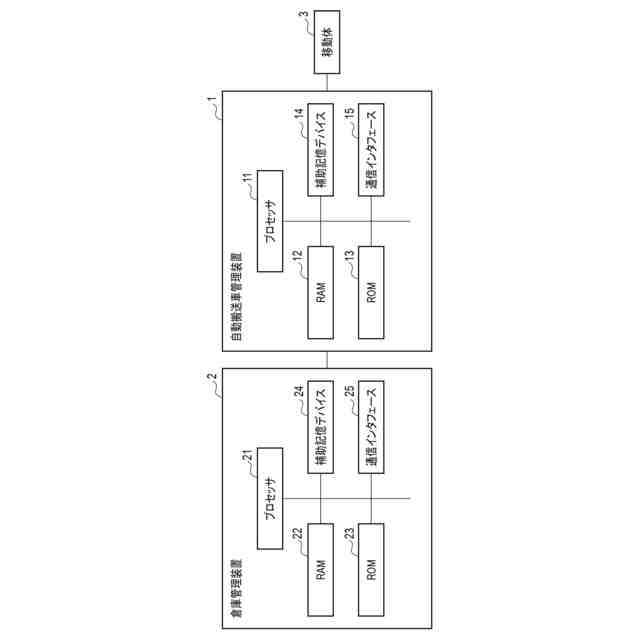
図2は、自動搬送車管理装置および倉庫管理装置のハードウェア構成の一例を示した図である。
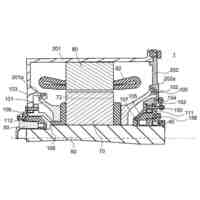
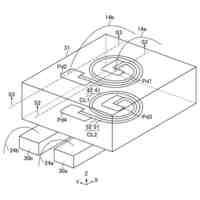
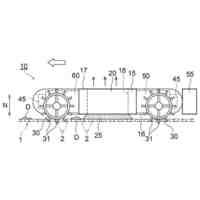
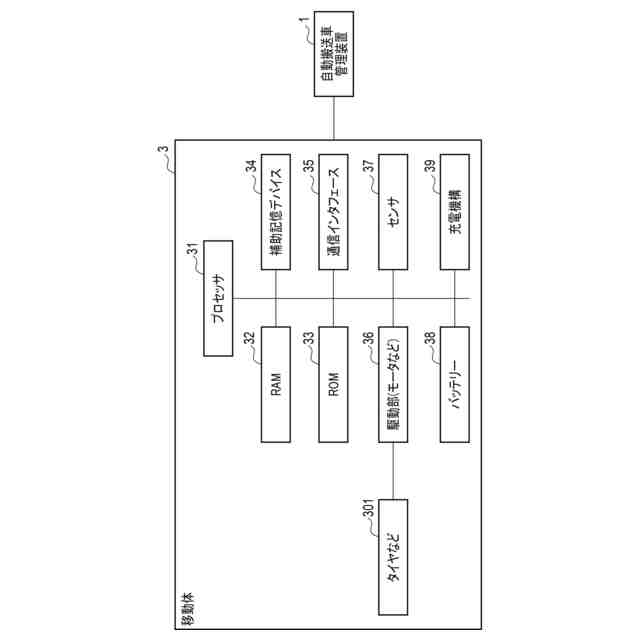
図3は、移動体のハードウェア構成の一例を示す図である。
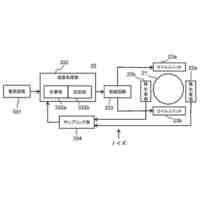
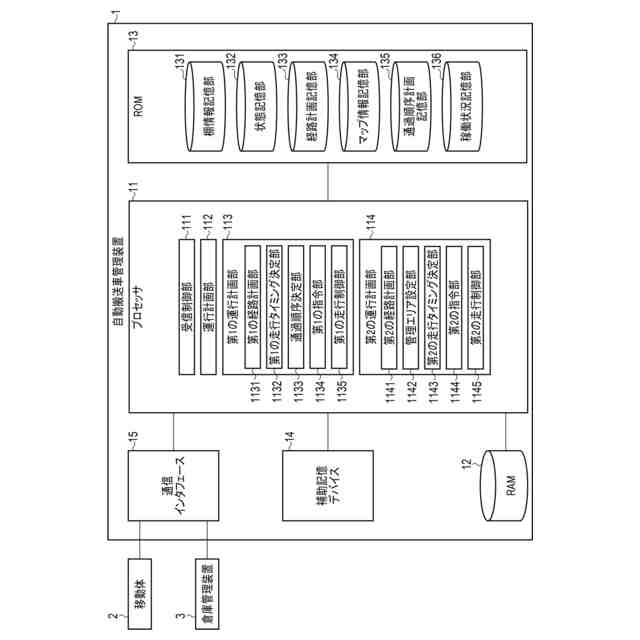
図4は、自動搬送車管理装置のソフトウェア構成の一例を示す図である。
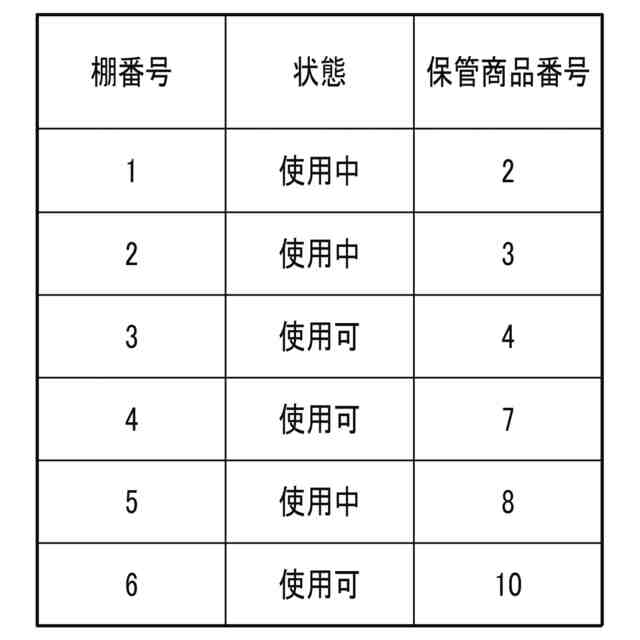
図5は、棚情報記憶部が記憶する棚情報の一例を示した図である。
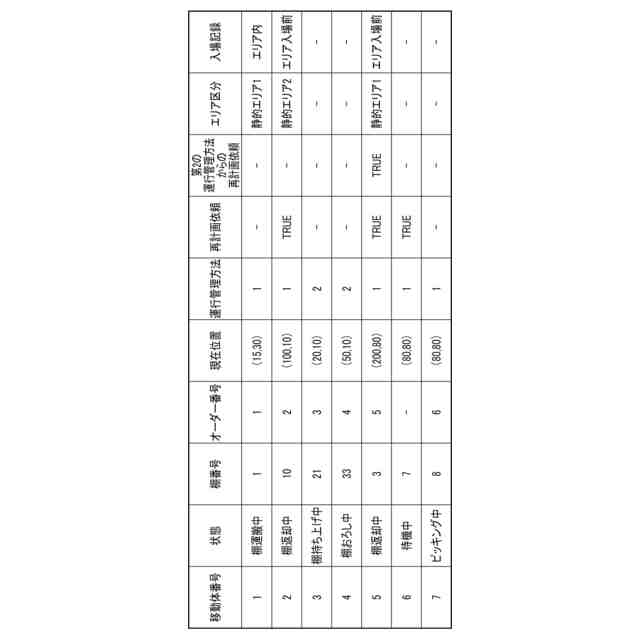
図6は、状態記憶部が記憶する移動体状態情報の一例を示した図である。
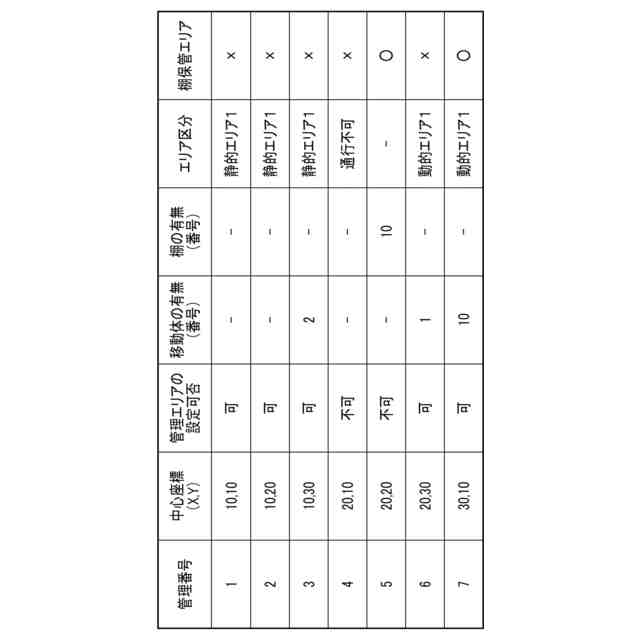
図7は、マップ情報記憶部に記憶されたマップ情報の一例を示す図である。
図8は、マップ情報記憶部に記憶されたマップ情報の一例を示す図である。
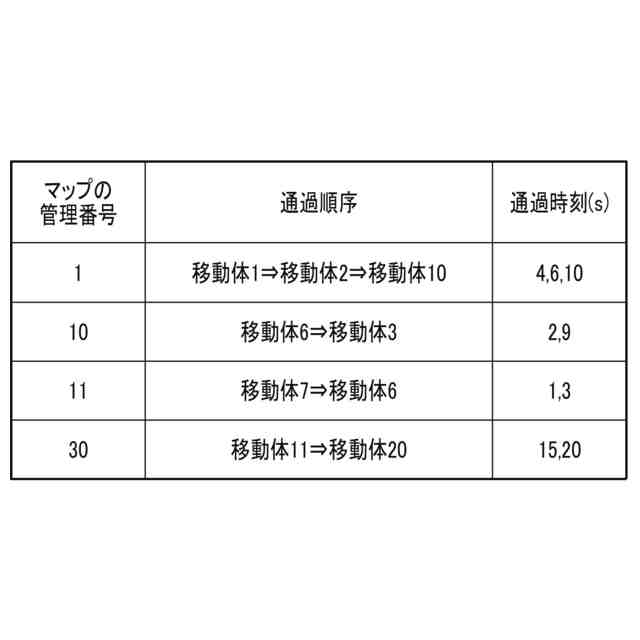
図9は、通過順序計画記憶部に記憶された通過順序計画の一例を示す図である。
図10は、稼働状況記憶部に記憶された環境情報の一例を示した図である。
図11は、オーダー情報の一例を示した図である。
図12は、実施形態に係る自動搬送車管理装置による移動体に棚の搬送を指示する場合の動作の一例を説明するためのフローチャートである。
図13は、ステップST114の処理をさらに詳細に説明したフローチャートである。
図14は、ステップST120の処理をさらに詳細に説明したフローチャートである。
図15は、移動体の退避方法の一例を示した図である。
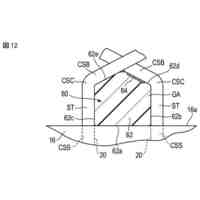
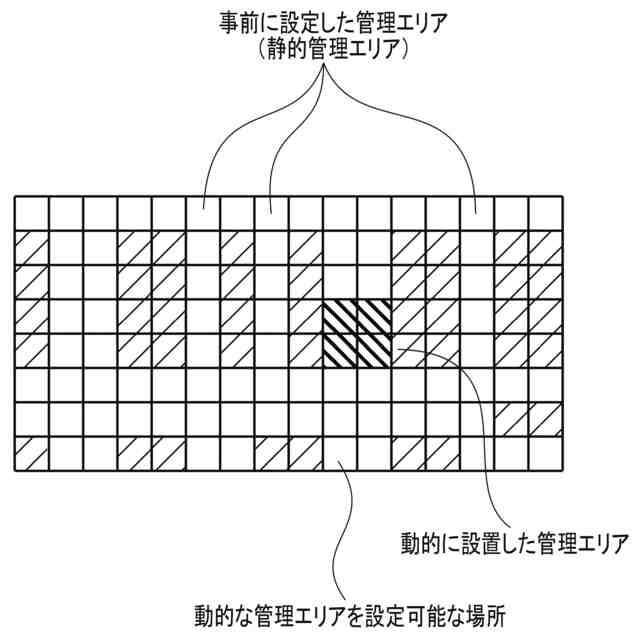
図16は、動的な管理エリアの設定方法についての一例を示した図である。
図17は、実施形態の第1の実施形態に係る自動搬送車管理装置1のソフトウェア構成の一例を示す図である。
図18は、実施形態の第2の変形例における管理エリアの設定方法の一例を示した図である。
【発明を実施するための形態】
【0010】
以下、図面を参照しながら自動搬送車管理装置、自動搬送車管理方法、および自動搬送車管理プログラムについて詳細に説明する。なお、以下の実施形態では、同一の番号を付した部分については同様の動作を行うものとして、重ねての説明を省略する。例えば、複数の同一または類似の要素が存在する場合に、各要素を区別せずに説明するために共通の符号を用いることがあるし、各要素を区別して説明するために当該共通の符号に加えて枝番号を用いることもある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
2か月前
株式会社東芝
搬送装置
20日前
株式会社東芝
立て看板
1か月前
株式会社東芝
配線治具
12日前
株式会社東芝
回転電機
2か月前
株式会社東芝
回転電機
2か月前
株式会社東芝
判定装置
21日前
株式会社東芝
回転電機
26日前
株式会社東芝
制御装置
1か月前
株式会社東芝
電子機器
20日前
株式会社東芝
回転電機
2か月前
株式会社東芝
遮断装置
19日前
株式会社東芝
電磁流量計
14日前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
主幹制御器
5日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
26日前
株式会社東芝
真空バルブ
2か月前
株式会社東芝
電力変換装置
2か月前
株式会社東芝
配線支援装置
2か月前
株式会社東芝
アンテナ装置
18日前
株式会社東芝
操作盤カバー
18日前
株式会社東芝
区分システム
1か月前
株式会社東芝
静止誘導電器
2か月前
株式会社東芝
ディスク装置
14日前
株式会社東芝
情報表示装置
2か月前
株式会社東芝
アイソレータ
1か月前
株式会社東芝
水中洗浄装置
5日前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
静止誘導電器
2か月前
株式会社東芝
スイッチギヤ
1か月前
株式会社東芝
スイッチギヤ
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ