TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025095419
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211409
出願日
2023-12-14
発明の名称
距離測定システム、測位システム、距離測定方法および測位方法
出願人
日本無線株式会社
代理人
個人
主分類
G01S
11/02 20100101AFI20250619BHJP(測定;試験)
要約
【課題】時刻同期の必要がなく、回路規模やコストの増加を抑制することが可能な距離測定システム、測位システム、距離測定方法および測位方法を提供する。
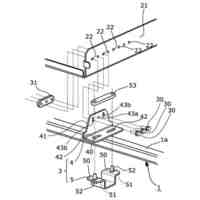
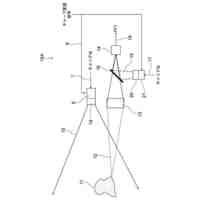
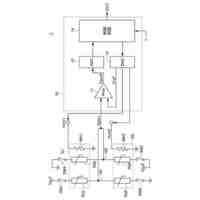
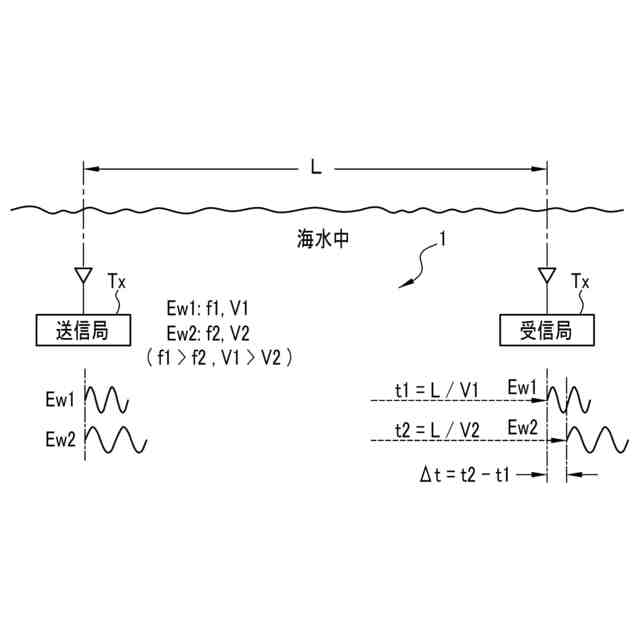
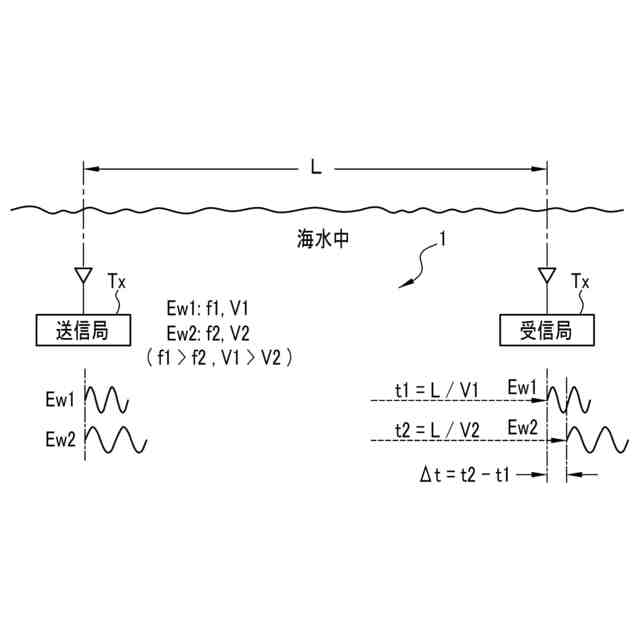
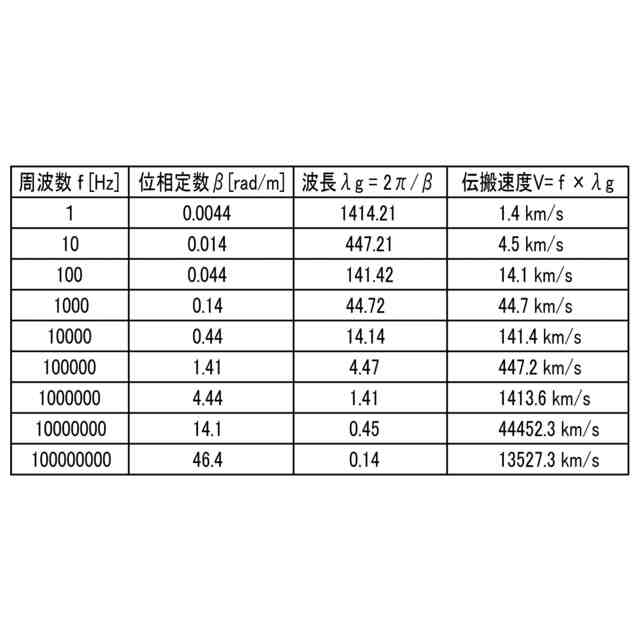
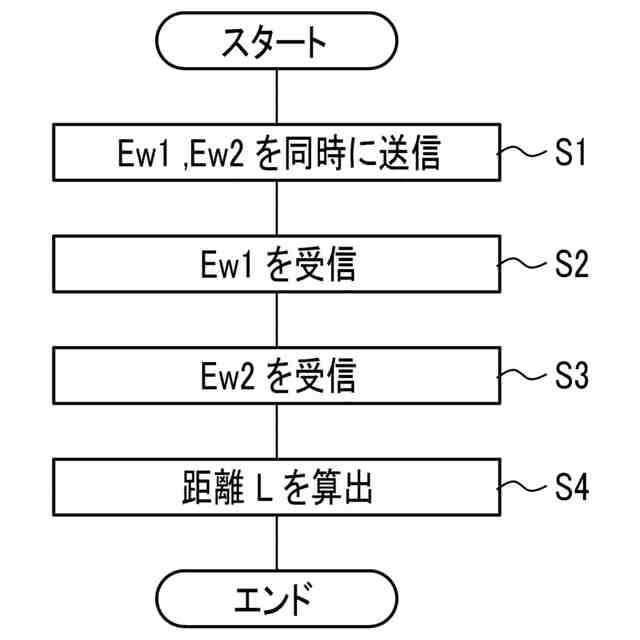
【解決手段】距離測定システム1は、送信局Txから周波数がそれぞれ異なる電磁波Ew1と電磁波Ew2とを海水中に同時に送信し、受信局Rxは、海水中を伝搬された電磁波Ew1と電磁波Ew2とを受信し、受信時刻の時間差と、電磁波Ew1およびEw2の海水中の伝搬速度V1、V2とに基づいて送信局Txまでの距離Lを算出する。
【選択図】図1
特許請求の範囲
【請求項1】
周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信する送信局と、
海水中を伝搬された前記第1の電磁波と前記第2の電磁波とを受信する受信局と、を備え、
前記受信局は、前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記送信局までの距離を算出する、
ことを特徴とする距離測定システム。
続きを表示(約 1,800 文字)
【請求項2】
周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信する第1の送信局と、
前記第1の送信局とは異なる位置に配置され、周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信する第2の送信局と、
前記第1の送信局および前記第2の送信局とは異なる位置に配置され、周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信する第3の送信局と、
海水中を伝搬された前記第1の電磁波と前記第2の電磁波とを受信する受信局と、を備え、
前記受信局は、
前記第1の送信局から送信された前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記第1の送信局までの距離を算出し、
前記第2の送信局から送信された前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記第2の送信局までの距離を算出し、
前記第3の送信局から送信された前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記第3の送信局までの距離を算出し、
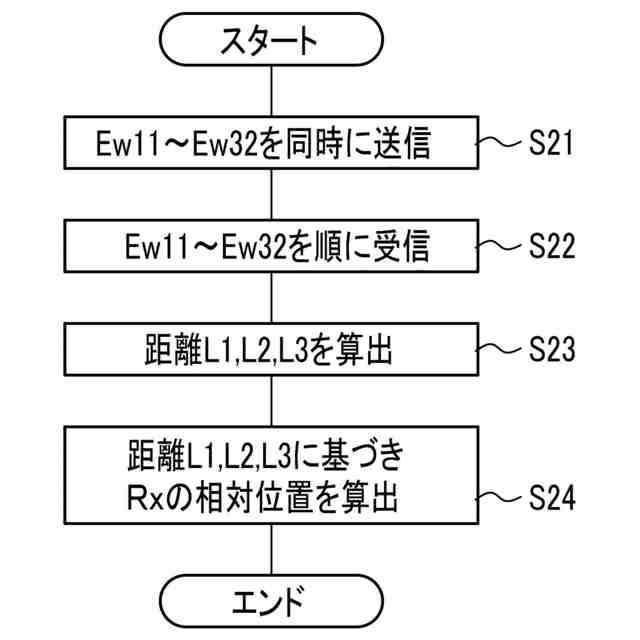
前記第1の送信局までの距離と、前記第2の送信局までの距離と、前記第3の送信局までの距離と、に基づいて相対位置を算出する、
ことを特徴とする測位システム。
【請求項3】
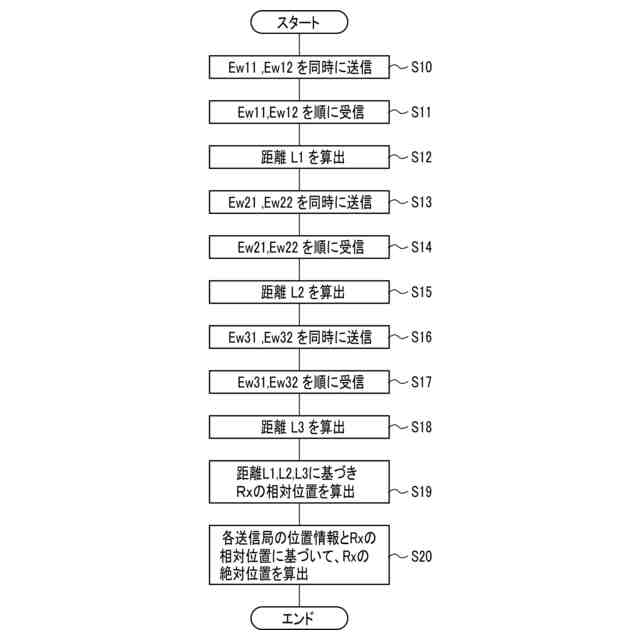
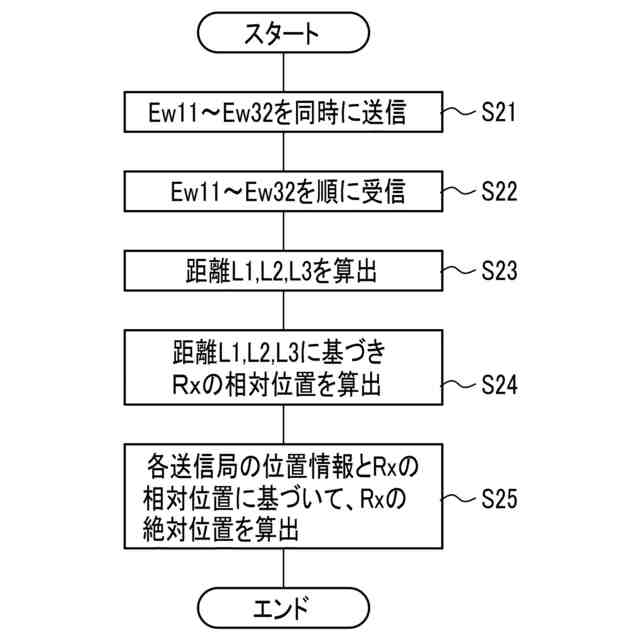
前記受信局は、前記第1の送信局の位置情報と、前記第2の送信局の位置情報と、前記第3の送信局の位置情報と、前記相対位置とに基づいて、絶対位置を算出する、
ことを特徴とする請求項2に記載の測位システム。
【請求項4】
送信局から周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信し、
受信局により、海水中を伝搬された前記第1の電磁波と前記第2の電磁波とを受信し、前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記送信局までの距離を算出する、
ことを特徴とする距離測定方法。
【請求項5】
第1の送信局から周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信し、
前記第1の送信局とは異なる位置に配置された第2の送信局から周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信し、
前記第1の送信局および前記第2の送信局とは異なる位置に配置された第3の送信局から周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信し、
受信局により、海水中を伝搬された前記第1の電磁波と前記第2の電磁波とを受信し、
前記第1の送信局から送信された前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記第1の送信局までの距離を算出し、
前記第2の送信局から送信された前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記第2の送信局までの距離を算出し、
前記第3の送信局から送信された前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記第3の送信局までの距離を算出し、
前記第1の送信局までの距離と、前記第2の送信局までの距離と、前記第3の送信局までの距離と、に基づいて相対位置を算出する、
ことを特徴とする測位方法。
【請求項6】
前記第1の送信局の位置情報と、前記第2の送信局の位置情報と、前記第3の送信局の位置情報と、前記相対位置とに基づいて、絶対位置を算出する、
ことを特徴とする請求項5に記載の測位方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、海水中において距離を測定するシステムおよび方法と、海水中において測位を行なうシステムおよび方法とに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、海水中の2点間の距離を測定する手法として、電磁波を利用するものが知られている。例えば、電磁波を利用する第1の手法では、送信した電磁波の信号減衰量と減衰定数とから距離を計算する。また、第2の手法では、電磁波が送信されてから受信されるまでの時間(到達時間)と、電磁波の海水中における伝搬速度とから距離を計算する。第3の手法では、送信された電磁波に対する受信された電磁波の位相変化量および波長から距離を計算する。
【0003】
また、第4の手法として、空気中で送受信される電波と、海水中で送受信される音波とを組み合わせて距離を測定する手法も知られている(例えば、特許文献1参照)。
この第4の手法では、空気中における電波の送受信の時刻と、海水中における音波の送受信の時刻とに基づいて距離を計算する。
【先行技術文献】
【特許文献】
【0004】
特開2017-090118号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した第1の手法では、送信アンテナおよび受信アンテナの指向性により信号減衰量が変動する可能性があり、信頼性、精度が悪化する可能性がある。また、所定レベルの信頼性、精度を得るには、指向性を考慮した信号減衰量の補正処理が必要となり、回路規模やコストが増加してしまう。また、第2の手法では、送信時刻と受信時刻とを測定するため、送信側と受信側とで時刻同期を行なう必要があり、回路規模やコストが増加してしまう。第3の手法では、位相変化量を測定するため、受信側で送信信号に同期した基準信号を持つ必要があり、回路規模やコストが増加してしまう。さらに、第4の手法では、送信側および受信側の双方に電波および音波の送受信回路が必要となり、時刻同期も必要となるため、回路規模やコストが増加してしまう。
【0006】
そこで本発明は、時刻同期の必要がなく、回路規模やコストの増加を抑制することが可能な距離測定システム、測位システム、距離測定方法および測位方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、請求項1に記載の発明は、周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信する送信局と、海水中を伝搬された前記第1の電磁波と前記第2の電磁波とを受信する受信局と、を備え、前記受信局は、前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記送信局までの距離を算出する、ことを特徴とする距離測定システムである。
【0008】
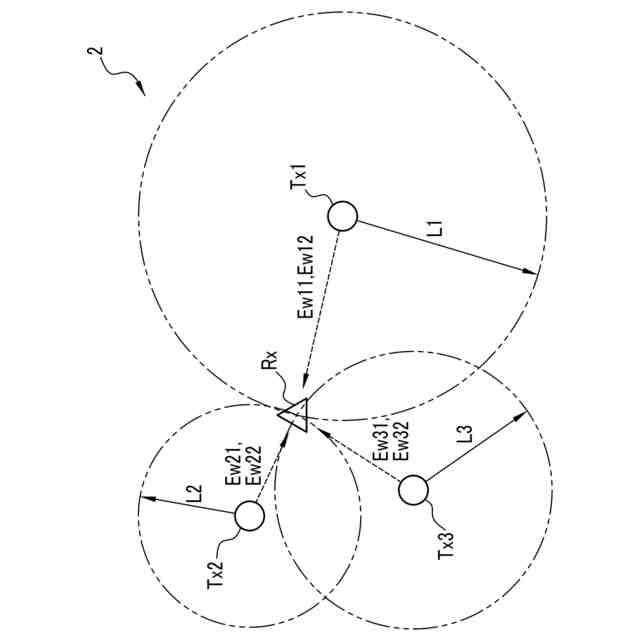
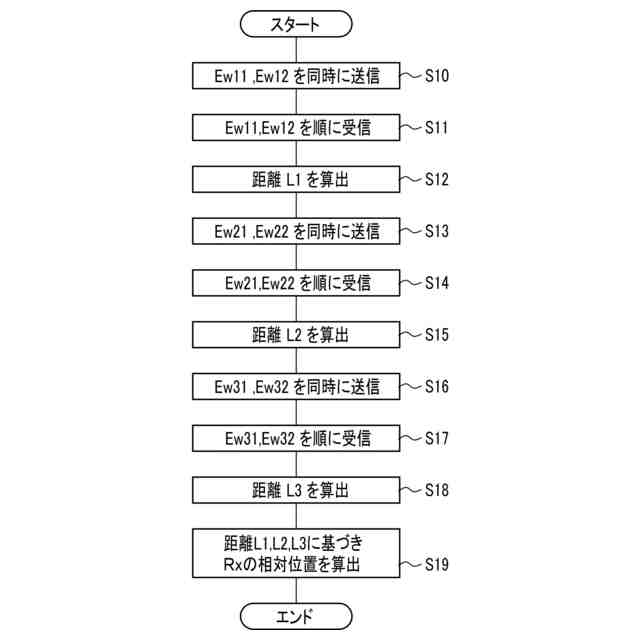
請求項2に記載の発明は、周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信する第1の送信局と、前記第1の送信局とは異なる位置に配置され、周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信する第2の送信局と、前記第1の送信局および前記第2の送信局とは異なる位置に配置され、周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信する第3の送信局と、海水中を伝搬された前記第1の電磁波と前記第2の電磁波とを受信する受信局と、を備え、前記受信局は、前記第1の送信局から送信された前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記第1の送信局までの距離を算出し、前記第2の送信局から送信された前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記第2の送信局までの距離を算出し、前記第3の送信局から送信された前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記第3の送信局までの距離を算出し、前記第1の送信局までの距離と、前記第2の送信局までの距離と、前記第3の送信局までの距離と、に基づいて相対位置を算出する、ことを特徴とする測位システムである。
【0009】
請求項3に記載の発明は、請求項2に記載の測位システムであって、前記受信局は、前記第1の送信局の位置情報と、前記第2の送信局の位置情報と、前記第3の送信局の位置情報と、前記相対位置とに基づいて、絶対位置を算出する、ことを特徴とする。
【0010】
請求項4に記載の発明は、送信局から周波数がそれぞれ異なる第1の電磁波と第2の電磁波とを海水中に同時に送信し、受信局により、海水中を伝搬された前記第1の電磁波と前記第2の電磁波とを受信し、前記第1の電磁波の受信時刻と前記第2の電磁波の受信時刻との時間差と、前記第1の電磁波の海水中の伝搬速度と、前記第2の電磁波の海水中の伝搬速度と、に基づいて前記送信局までの距離を算出する、ことを特徴とする距離測定方法である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本無線株式会社
取付金具
1か月前
日本無線株式会社
無線通信システム
8日前
日本無線株式会社
無線通信システム
13日前
日本無線株式会社
無線通信システム
15日前
長野日本無線株式会社
コネクタ部品の接続方法及び装置
27日前
日本無線株式会社
無線通信装置、通信方法、およびプログラム
1か月前
日本無線株式会社
レーダ装置およびレーダ装置における観測対象選択方法
22日前
日本無線株式会社
船陸間通信回線シミュレータおよび船陸間通信評価システム
15日前
日本無線株式会社
物標探知信号処理装置、物標探知システム及び物標探知信号処理プログラム
1か月前
日本無線株式会社
受信信号の異常の検出方法および検出装置、並びに、受信信号の異常の検出方法および検出装置を用いた船舶システム
1か月前
個人
微小振動検出装置
5日前
ユニパルス株式会社
力変換器
26日前
株式会社イシダ
X線検査装置
5日前
三菱電機株式会社
計測器
20日前
横浜ゴム株式会社
音響窓
28日前
株式会社豊田自動織機
産業車両
1か月前
日置電機株式会社
測定装置
27日前
株式会社辰巳菱機
システム
14日前
個人
センサーを備えた装置
1か月前
日本精機株式会社
施工管理システム
1か月前
IPU株式会社
距離検出装置
26日前
株式会社東芝
センサ
5日前
株式会社FRPカジ
FRP装置
16日前
株式会社東芝
センサ
29日前
アンリツ株式会社
分光器
今日
アンリツ株式会社
分光器
今日
富士レビオ株式会社
嵌合システム
19日前
株式会社精工技研
光電圧プローブ
6日前
株式会社CAST
センサ固定治具
1か月前
TDK株式会社
ガスセンサ
8日前
大和製衡株式会社
組合せ計量装置
16日前
株式会社カワタ
サンプリング装置
9日前
日本精工株式会社
分注装置
12日前
株式会社田中設備
報知装置
1か月前
学校法人立命館
液面レベルセンサ
13日前
TDK株式会社
磁気センサ
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ