TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095252
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211146
出願日
2023-12-14
発明の名称
優位眼判定システム、優位眼判定方法、眼鏡レンズ設計システム、眼鏡レンズ設計方法及びプログラム
出願人
株式会社ニコン・エシロール
代理人
個人
,
個人
,
個人
主分類
G02C
13/00 20060101AFI20250619BHJP(光学)
要約
【課題】好適に優位眼を判定する。
【解決手段】優位眼判定システムは、被験者の優位眼を判定する優位眼判定システムであって、前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得部と、前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出部と、前記被験者の左右の眼それぞれについて、前記視線ベクトルが前記対象物に接近した程度に基づいて、より接近している方を前記被験者の優位眼と判定する判定部とを備える。
【選択図】図45
特許請求の範囲
【請求項1】
被験者の優位眼を判定する優位眼判定システムであって、
前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得部と、
前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出部と、
前記被験者の左右の眼それぞれについて、前記視線ベクトルが前記対象物に接近した程度に基づいて、より接近している方を前記被験者の優位眼と判定する判定部と、
を備える優位眼判定システム。
続きを表示(約 1,500 文字)
【請求項2】
前記判定部は、前記対象物を動かした場合において、前記被験者の左右の眼それぞれについて、前記視線ベクトルと前記対象物の前記三次元空間上における位置とが最も接近した場合の距離を記憶しておき、より接近している方を前記被験者の優位眼と判定する、
請求項1に記載の優位眼判定システム。
【請求項3】
前記判定部は、前記対象物が少なくとも同様の移動を3セット以上繰り返した後、前記被験者の優位眼を判定する、
請求項1又は請求項2に記載の優位眼判定システム。
【請求項4】
前記判定部は、前記対象物が同様の移動を繰り返す間に算出された前記視線ベクトルと前記対象物の前記三次元空間上における位置との間の距離の統計演算値に基づいて、前記被験者の優位眼を判定する、
請求項3に記載の優位眼判定システム。
【請求項5】
前記視線ベクトルにより取得される前記視線ベクトルは、前記被験者の視線が、前記被験者が装着する眼鏡により屈折した視線を示す、
請求項1又は請求項2の優位眼判定システム。
【請求項6】
前記対象物は、仮想空間に再現された、生活環境において移動させられる、
請求項1又は請求項2の優位眼判定システム。
【請求項7】
被験者の優位眼を判定する優位眼判定方法であって、
前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得工程と、
前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出工程と、
前記被験者の左右の眼それぞれについて、前記視線ベクトルが前記対象物に接近した程度に基づいて、より接近している方を前記被験者の優位眼と判定する判定工程と、
を有する優位眼判定方法。
【請求項8】
コンピュータに、
被験者の優位眼を判定するプログラムであって、
前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得ステップと、
前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出ステップと、
前記被験者の左右の眼それぞれについて、前記視線ベクトルが前記対象物に接近した程度に基づいて、より接近している方を前記被験者の優位眼と判定する判定ステップと、
を実行させるプログラム。
【請求項9】
被験者の眼鏡レンズを設計する眼鏡レンズ設計システムであって、
前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得部と、
前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出部と、
前記被験者が装用していると仮定する眼鏡レンズにおける前記視線ベクトルの軌跡を包含する凸包領域を使用して、眼鏡レンズを設計する眼鏡レンズ設計部と、
を備える眼鏡レンズ設計システム。
【請求項10】
前記眼鏡レンズ設計部は、前記眼鏡レンズにおける前記視線ベクトルの軌跡から、所定の条件に基づいてノイズを削除して設定された前記凸包領域を使用して、眼鏡レンズを設計する、
請求項9の眼鏡レンズ設計システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、優位眼判定システム、優位眼判定方法、眼鏡レンズ設計システム、眼鏡レンズ設計方法及びプログラムに関する。
続きを表示(約 4,200 文字)
【背景技術】
【0002】
装用者の利き目の度合に応じた眼鏡レンズを提供する技術が知られている。例えば、特許文献1には、眼鏡レンズの設計方法が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-169812号公報
【発明の概要】
【0004】
本発明の一態様は、被験者の優位眼を判定する優位眼判定システムであって、前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得部と、前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出部と、前記被験者の左右の眼それぞれについて、前記視線ベクトルが前記対象物に接近した程度に基づいて、より接近している方を前記被験者の優位眼と判定する判定部と、を備える優位眼判定システムである。
【0005】
また、本発明の一態様は、被験者の優位眼を判定する優位眼判定方法であって、前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得工程と、前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出工程と、前記被験者の左右の眼それぞれについて、前記視線ベクトルが前記対象物に接近した程度に基づいて、より接近している方を前記被験者の優位眼と判定する判定工程と、を有する優位眼判定方法である。
【0006】
また、本発明の一態様は、コンピュータに、被験者の優位眼を判定するプログラムであって、前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得ステップと、前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出ステップと、前記被験者の左右の眼それぞれについて、前記視線ベクトルが前記対象物に接近した程度に基づいて、より接近している方を前記被験者の優位眼と判定する判定ステップと、を実行させるプログラムである。
【0007】
また、本発明の一態様は、被験者の眼鏡レンズを設計する眼鏡レンズ設計システムであって、前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得部と、前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出部と、前記被験者が装用していると仮定する眼鏡レンズにおける前記視線ベクトルの軌跡を包含する凸包領域を使用して、眼鏡レンズを設計する眼鏡レンズ設計部と、を備える眼鏡レンズ設計システムである。
【0008】
また、本発明の一態様は、被験者の眼鏡レンズを設計する眼鏡レンズ設計方法であって、前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得工程と、前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出工程と、前記被験者が装用していると仮定する眼鏡レンズにおける前記視線ベクトルの軌跡を包含する凸包領域を使用して、眼鏡レンズを設計する眼鏡レンズ設計工程と、を有する眼鏡レンズ設計方法である。
【0009】
また、本発明の一態様は、コンピュータに、被験者の眼鏡レンズを設計するプログラムであって、前記被験者の両眼それぞれの視線の動きを、三次元空間上に示す視線ベクトルを取得する視線ベクトル取得ステップと、前記被験者により視認されることが可能な対象物の前記三次元空間上における位置と、前記対象物を追う前記視線ベクトルの接近の程度を算出する算出ステップと、前記被験者が装用していると仮定する眼鏡レンズにおける前記視線ベクトルの軌跡を包含する凸包領域を使用して、眼鏡レンズを設計する眼鏡レンズ設計ステップと、を実行させるプログラムである。
【図面の簡単な説明】
【0010】
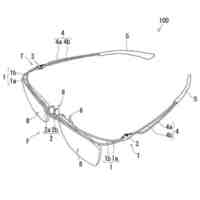
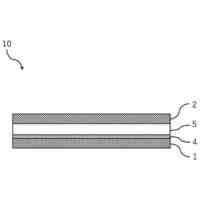
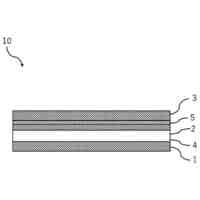
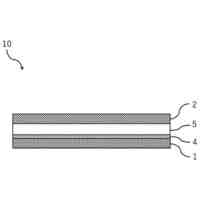
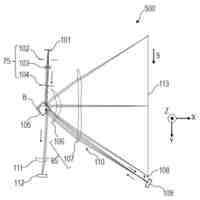
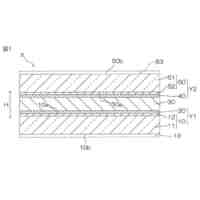
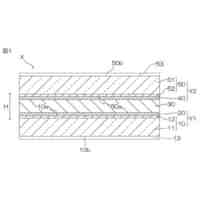
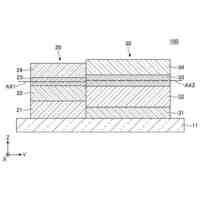
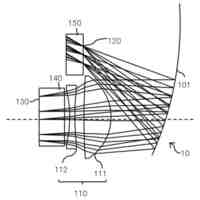
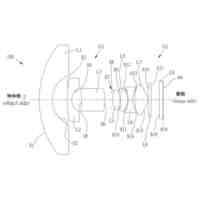
一実施形態に係る眼鏡レンズを示す概念図である。
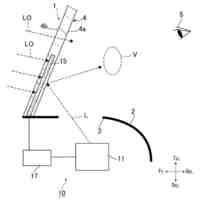
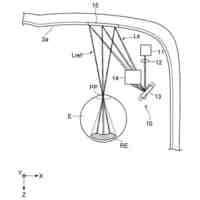
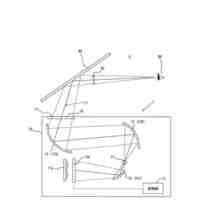
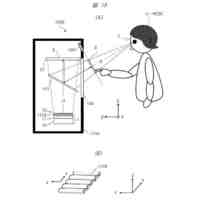
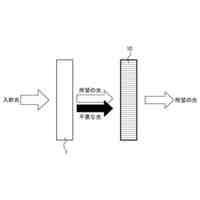
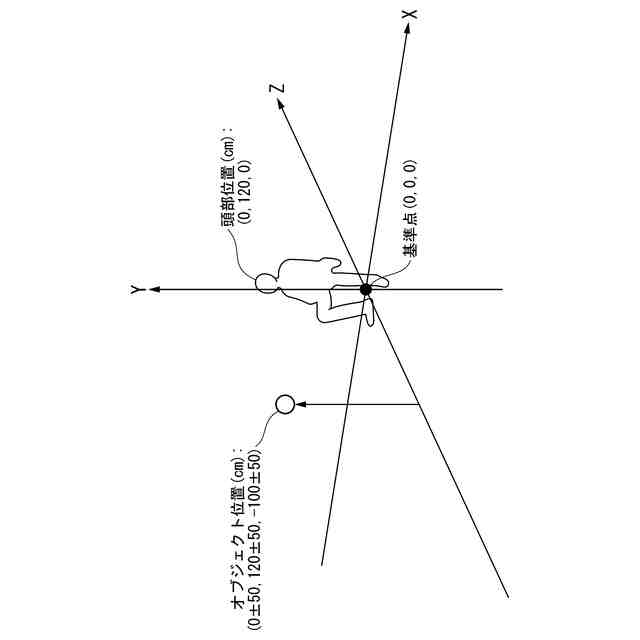
本実施形態に係る仮想環境において、被験者が物体を視線で追う実験の概念について説明するための図である。
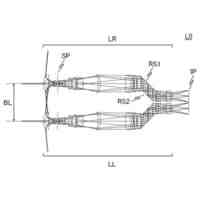
本実施形態に係る仮想環境において、被験者の左眼眼球の視線ベクトルを示す図である。
本実施形態に係る仮想空間において、球体を動かした場合における球体の座標と、左眼眼球の視線ベクトルが球体に最接近したときの座標の変化を示す図である。
本実施形態に係る仮想空間において、球体を動かした場合における球体の座標と、右眼眼球の視線ベクトルが球体に最接近したときの座標の変化を示す図である。
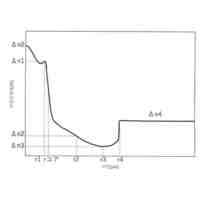
本実施形態に係る仮想空間において、球体を動かした場合における視線ベクトルが球体に最接近したときの座標の変化を示す図である。
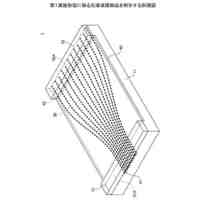
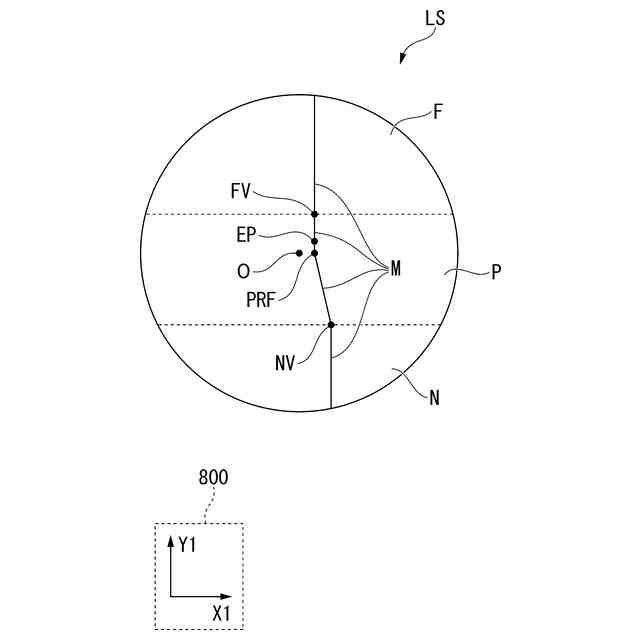
本実施形態に係る左眼の眼鏡レンズ上を通る視線の位置を示した図である。
本実施形態に係る右眼の眼鏡レンズ上を通る視線の位置を示した図である。
本実施形態に係る左眼の眼鏡レンズ上を通る視線の位置について、信頼できないデータを排除した場合の一例を示した図である。
本実施形態に係る右眼の眼鏡レンズ上を通る視線の位置について、信頼できないデータを排除した場合の一例を示した図である。
本実施形態に係る仮想環境において、被験者が自身の左側に存在する物体を視線で追う実験について説明するための図である。
本実施形態に係る被験者が自身の左側に存在する物体を視線で追う実験において、球体を動かした場合における視線ベクトルが球体に最接近したときの座標の変化を示す図である。
本実施形態に係る被験者が自身の左側に存在する物体を視線で追う実験において、左眼の眼鏡レンズ上を通る視線の位置を示した図である。
本実施形態に係る被験者が自身の左側に存在する物体を視線で追う実験において、右眼の眼鏡レンズ上を通る視線の位置を示した図である。
本実施形態に係る被験者が自身の左側に存在する物体を視線で追う実験において、左眼の眼鏡レンズ上を通る視線の位置について、信頼できないデータを排除した場合の一例を示した図である。
本実施形態に係る被験者が自身の左側に存在する物体を視線で追う実験において、右眼の眼鏡レンズ上を通る視線の位置について、信頼できないデータを排除した場合の一例を示した図である。
本実施形態に係る左レンズの平均屈折力マップを示す図である。
本実施形態に係る左レンズの非点収差マップを示す図である。
本実施形態に係る右レンズの平均屈折力マップを示す図である。
本実施形態に係る右レンズの非点収差マップを示す図である。
本実施形態に係る左レンズの平均屈折力マップに重ねる範囲を示した図である。
本実施形態に係る左レンズの非点収差マップに重ねる範囲を示した図である。
本実施形態に係る遠用範囲における平均屈折力マップの差を示した図である。
本実施形態に係る遠用範囲における非点収差マップの差を示した図である。
本実施形態に係る近用範囲における平均屈折力マップの差を示した図である。
本実施形態に係る近用範囲における非点収差マップの差を示した図である。
本実施形態に係る左レンズの非点収差マップを示した図である。
本実施形態に係る右レンズの非点収差マップを示した図である。
本実施形態に係る左レンズの非点収差マップを示した図である。
本実施形態に係る左レンズの非点収差マップを示した図である。
本実施形態に係る左レンズ上での遠用部の範囲においての差を示した図である。
本実施形態に係る右レンズ上での遠用部の範囲においての差を示した図である。
本実施形態に係る左レンズ上での近用部の範囲においての差を示した図である。
本実施形態に係る右レンズ上での近用部の範囲においての差を示した図である。
本実施形態に係る左レンズの非点収差マップを示した図である。
本実施形態に係る右レンズの非点収差マップを示した図である。
本実施形態に係る左レンズ上での遠用部の範囲においての差を示した図である。
本実施形態に係る右レンズ上での遠用部の範囲においての差を示した図である。
本実施形態に係る左レンズ上での近用部の範囲においての差を示した図である。
本実施形態に係る右レンズ上での近用部の範囲においての差を示した図である。
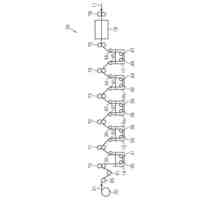
本実施形態に係る非点収差マップの左右差をなくし、優位眼を考慮する設計の一連の流れの一例を示すフローチャートである。
本実施形態に係る実験から得られた視線データより、設計に反映する視線範囲、優位眼を決める処理の一連の流れの一例を示すフローチャートである。
本実施形態に係る視線範囲内における平均屈折力マップ、非点収差マップの差分を算出し、非優位眼の平均屈折力マップ、非点収差マップにその差分を反映させ、非優位眼のターゲットとなる平均屈折力マップ、非点収差マップを生成する処理の一連の流れの一例を示すフローチャートである。
本実施形態に係る平均屈折力マップ、非点収差マップをターゲットとし、眼球側の面を生成する処理の一連の流れの一例を示すフローチャートである。
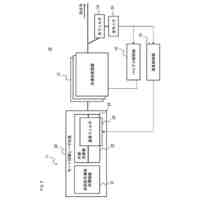
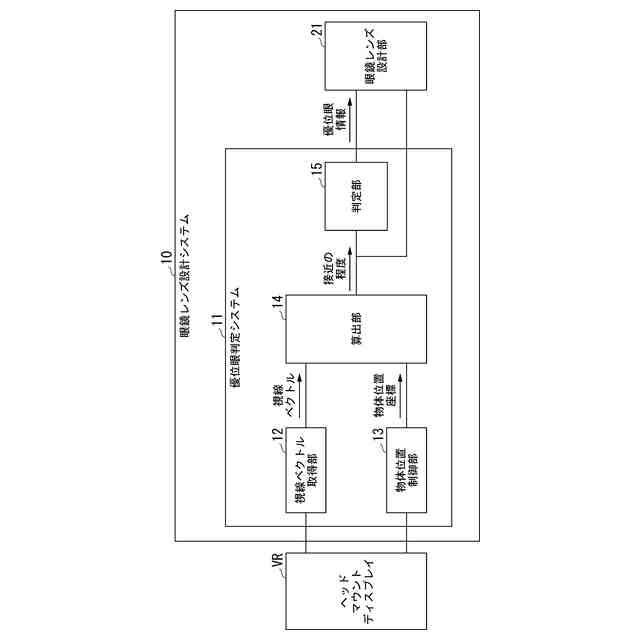
本実施形態に係る眼鏡レンズ設計システム及び優位眼判定システムの機能構成の一例を示す機能構成図である。
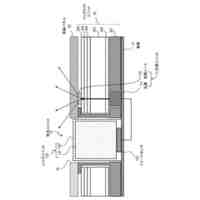
本実施形態に係る眼鏡レンズ設計システム及び優位眼判定システムが備える装置の内部構成の一例を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社シグマ
結像光学系
5日前
日本精機株式会社
車両用表示装置
10日前
日本精機株式会社
車両用表示装置
10日前
日本電波工業株式会社
光学フィルタ
4日前
株式会社シグマ
大口径比超広角レンズ
10日前
株式会社シャルマン
眼鏡
6日前
個人
2重らせん構造式仮想現実シミュレーター
9日前
本多通信工業株式会社
光コネクタ
18日前
住友化学株式会社
光学積層体
6日前
TDK株式会社
網膜投影装置
10日前
新光電気工業株式会社
光導波路部品
5日前
日本精機株式会社
ヘッドアップディスプレイ装置
12日前
住友化学株式会社
偏光子の製造方法
5日前
AGC株式会社
光学フィルタ
18日前
AGC株式会社
光学フィルタ
18日前
AGC株式会社
光学フィルタ
18日前
上海天馬微電子有限公司
液晶表示装置
3日前
日本化薬株式会社
偏光発光膜、偏光発光板及び表示装置
11日前
信越化学工業株式会社
シングルモード光ファイバ
4日前
キヤノン株式会社
画像形成装置
4日前
マクセル株式会社
空中浮遊映像表示装置
3日前
AGC株式会社
光学素子
11日前
日本電気株式会社
光送信器及び光送信器の制御方法
12日前
セイコーエプソン株式会社
光学表示装置
6日前
日本放送協会
角度選択フィルター
17日前
日東電工株式会社
調光フィルム
10日前
日東電工株式会社
調光フィルム
10日前
アルプスアルパイン株式会社
表示装置
5日前
住友電気工業株式会社
光学素子
18日前
小林製薬株式会社
硬質表面用クリーナー
4日前
信越ポリマー株式会社
視野角制御フィルムの製造方法
5日前
日亜化学工業株式会社
光回路、及び光回路の製造方法
5日前
キヤノン株式会社
ステレオ光学系および撮像装置
12日前
キヤノン株式会社
ステレオ光学系および撮像装置
13日前
キヤノン株式会社
表示光学系および画像表示装置
13日前
佳凌科技股ふん有限公司
光学結像レンズ装置
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ