TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025088915
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2023203745
出願日
2023-12-01
発明の名称
分析システムおよび分析プログラム
出願人
株式会社日立製作所
代理人
藤央弁理士法人
主分類
G06T
7/20 20170101AFI20250605BHJP(計算;計数)
要約
【課題】空間の状態を推論する推論モデルの学習精度および推論精度の向上を図ること。
【解決手段】分析システムは、プログラムを実行するプロセッサと、プログラムを記憶する記憶デバイスと、を有する分析システムであって、プロセッサは、推論対象の動きに関する情報および推論対象の方向に関する情報を包含する包含特徴量を繰り返し取得する取得処理と、取得処理によって繰り返し取得された複数の包含特徴量のうち、第1時刻の包含特徴量から第2時刻の包含特徴量までの各々について、所定時間前の第3時刻の包含特徴量を結合することにより、第1時刻のシフト特徴量から第2時刻のシフト特徴量までのシフト特徴量群を生成する生成処理と、生成処理によって生成されたシフト特徴量群を、第1時刻から第2時刻までの期間における推論対象の状態を推論する推論モデルに出力する出力処理と、を実行する。
【選択図】図3
特許請求の範囲
【請求項1】
プログラムを実行するプロセッサと、前記プログラムを記憶する記憶デバイスと、を有する分析システムであって、
前記プロセッサは、
推論対象の動きに関する情報および前記推論対象の方向に関する情報を包含する包含特徴量を繰り返し取得する取得処理と、
前記取得処理によって繰り返し取得された複数の包含特徴量のうち、第1時刻の包含特徴量から第2時刻の包含特徴量までの各々について、所定時間前の第3時刻の包含特徴量を結合することにより、前記第1時刻のシフト特徴量から前記第2時刻のシフト特徴量までのシフト特徴量群を生成する生成処理と、
前記生成処理によって生成されたシフト特徴量群を、前記第1時刻から前記第2時刻までの期間における前記推論対象の状態を推論する推論モデルに出力する出力処理と、
を実行することを特徴とする分析システム。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載の分析システムであって、
前記推論対象の動きに関する情報は、前記推論対象の移動速度を含み、
前記推論対象の方向に関する情報は、前記推論対象が移動する移動方向を含む、
ことを特徴とする分析システム。
【請求項3】
請求項2に記載の分析システムであって、
前記移動速度は、複数の推論対象の複数の移動速度のうち、特定の推論対象の特定の移動速度であり、
前記移動方向は、前記特定の推論対象が前記特定の移動速度で移動する特定の移動方向である、
ことを特徴とする分析システム。
【請求項4】
請求項3に記載の分析システムであって、
前記特定の移動速度は、前記複数の移動速度の中の最高移動速度であり、
前記特定の移動方向は、前記特定の推論対象が移動する前記最高移動速度での移動方向である、
ことを特徴とする分析システム。
【請求項5】
請求項2に記載の分析システムであって、
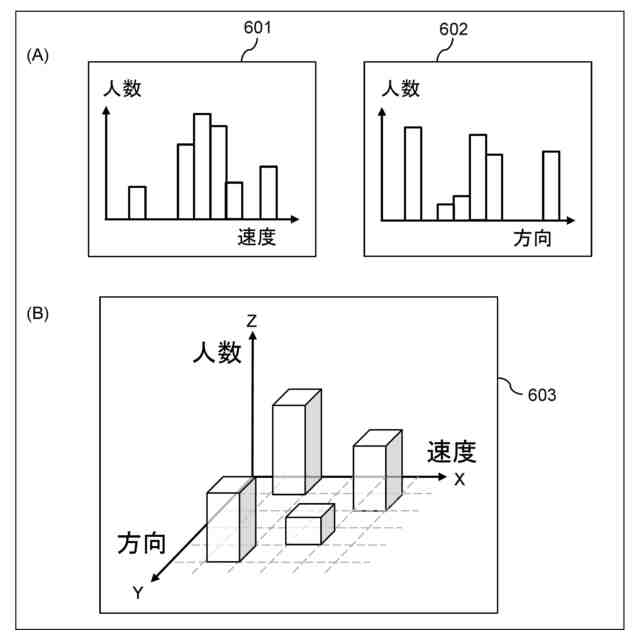
前記推論対象の動きに関する情報は、移動速度別の人数を示す第1一次元ヒストグラムであり、
前記推論対象の方向に関する情報は、移動方向別の人数を示す第2一次元ヒストグラムであり、
前記取得処理では、前記プロセッサは、前記特定の移動速度と、前記特定の移動方向と、前記第1一次元ヒストグラムおよび前記第2一次元ヒストグラムと、を、前記包含特徴量として取得する、
ことを特徴とする分析システム。
【請求項6】
請求項2に記載の分析システムであって、
前記推論対象の動きに関する情報は、移動速度別の人数を示す第1一次元ヒストグラムであり、
前記推論対象の方向に関する情報は、移動方向別の人数を示す第2一次元ヒストグラムであり、
前記取得処理では、前記プロセッサは、前記特定の移動速度と、前記特定の移動方向と、前記第1一次元ヒストグラムおよび前記第2一次元ヒストグラムを統合した二次元ヒストグラムと、を、前記包含特徴量として取得する、
ことを特徴とする分析システム。
【請求項7】
請求項2に記載の分析システムであって、
前記推論対象の動きに関する情報は、移動速度別の人数を示す第1一次元ヒストグラムであり、
前記推論対象の方向に関する情報は、移動方向別の人数を示す第2一次元ヒストグラムであり、
前記プロセッサは、
前記推論対象が前記移動方向に向かって前記移動速度で移動することを示す移動ベクトルの個数に基づいて、前記第1一次元ヒストグラムおよび前記第2一次元ヒストグラムを統合した二次元ヒストグラムを生成するか否かを判定する判定処理を実行し、
前記取得処理では、前記プロセッサは、前記判定処理によって前記二次元ヒストグラムを生成しないと判定された場合、前記特定の移動速度と、前記特定の移動方向と、前記第1一次元ヒストグラムおよび前記第2一次元ヒストグラムと、を、前記包含特徴量として取得し、前記判定処理によって前記二次元ヒストグラムを生成すると判定された場合、前記特定の移動速度と、前記特定の移動方向と、前記二次元ヒストグラムと、を、前記包含特徴量として取得する、
ことを特徴とする分析システム。
【請求項8】
請求項1に記載の分析システムであって、
前記生成処理では、前記プロセッサは、前記複数の包含特徴量のうち、第1時刻の包含特徴量から第2時刻の包含特徴量までの各々について、複数の所定時間前の複数の第3時刻の包含特徴量を結合することにより、前記第1時刻のシフト特徴量から前記第2時刻のシフト特徴量までのシフト特徴量群を生成する、
ことを特徴とする分析システム。
【請求項9】
請求項1に記載の分析システムであって、
前記推論対象の動きに関する情報は、前記推論対象の顔の動きに関する情報を含み、
前記推論対象の方向に関する情報は、前記推論対象が目視する視線方向を含む、
ことを特徴とする分析システム。
【請求項10】
請求項1に記載の分析システムであって、
前記プロセッサは、
前記シフト特徴量群を説明変数とし、前記第1時刻の状態から前記第2時刻の状態までの状態群を目的変数として、前記推論モデルを学習する学習処理と、
を実行することを特徴とする分析システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、データを分析する分析システムおよび分析プログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
本技術分野の背景技術として、特許文献1は、人および物体を検知する人検出部および物体検出部と、前記人検出部により検知した人の動きおよび形状情報と前記物体検出部により検知した物体の動き情報に基づいて特徴量を推論する特徴量推論部と、予め定常状態モデルを保持する定常状態モデル保存部と、前記特徴量推論部および定常状態モデル保存部により定常状態の特徴量を学習する定常状態モデル推論部と、前記特徴量推論部により算出した特徴量および前記定常状態モデル保存部のデータを用いて定常状態モデルからの逸脱を判断する非定常状態推論部と、前記非定常状態推論部により非定常状態を推論する。
【先行技術文献】
【特許文献】
【0003】
特開2020-149389号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に開示された技術では、密集した群衆や遮蔽物の多い環境においては、人の動き及び形状情報を正確に解析できず非定常状態を学習したり推論したりすることが困難である。
【0005】
本発明は、上記問題を鑑みてなされたものであり、空間の状態を推論する推論モデルの学習精度および推論精度の向上を図ることを目的とする。
【課題を解決するための手段】
【0006】
本願の第1開示技術である分析システムは、プログラムを実行するプロセッサと、前記プログラムを記憶する記憶デバイスと、を有する分析システムであって、前記プロセッサは、推論対象の動きに関する情報および前記推論対象の方向に関する情報を包含する包含特徴量を繰り返し取得する取得処理と、前記取得処理によって繰り返し取得された複数の包含特徴量のうち、第1時刻の包含特徴量から第2時刻の包含特徴量までの各々について、所定時間前の第3時刻の包含特徴量を結合することにより、第1時刻のシフト特徴量から第2時刻のシフト特徴量までのシフト特徴量群を生成する生成処理と、前記生成処理によって生成されたシフト特徴量群を、前記第1時刻から前記第2時刻までの期間における前記推論対象の状態を推論する推論モデルに出力する出力処理と、を実行することを特徴とする。
【発明の効果】
【0007】
本発明の代表的な実施の形態によれば、空間の状態を推論する推論モデルの学習精度および推論精度の向上を図る前述した以外の課題、構成及び効果は、以下の実施例の説明により明らかにされる。
【図面の簡単な説明】
【0008】
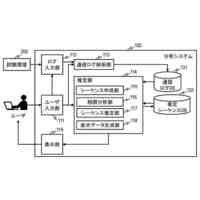
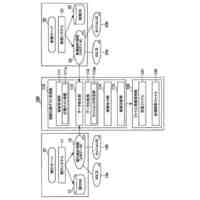
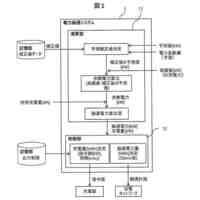
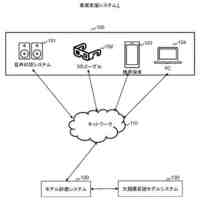
図1は、実施例1にかかる分析システムのシステム構成例を示す説明図である。
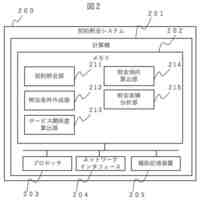
図2は、コンピュータのハードウェア構成例を示すブロック図である。
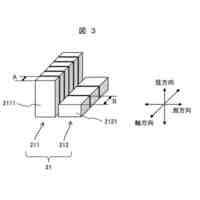
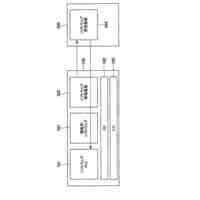
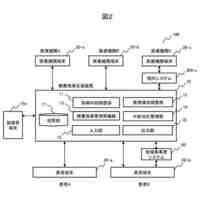
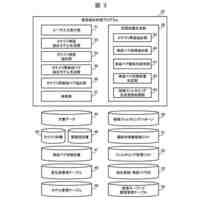
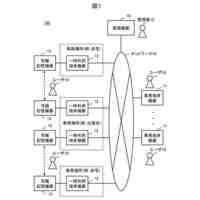
図3は、実施例1にかかる分析システムの機能的構成例を示すブロック図である。
図4は、軌跡IDおよび移動ベクトルの生成例を示す説明図である。
図5は、速度分布および方向分布を示す説明図である。
図6は、時刻tのヒストグラム特徴量の算出例を示す説明図である。
図7は、シフト特徴量の生成例を示す説明図である。
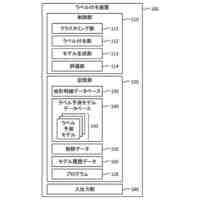
図8は、学習データの保存方法の一例を示す説明図である。
図9は、分析システムによる空間の解析例を示す説明図である。
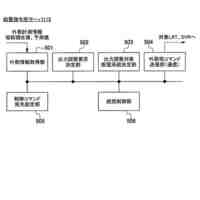
図10は、実施例1にかかるサーバ(学習装置)による学習処理の詳細な処理手順例を示すフローチャートである。
図11は、実施例1にかかるクライアント(推論装置)による状態推論処理手順例を示すフローチャートである。
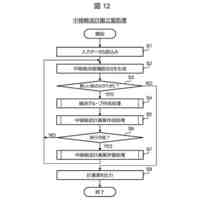
図12は、実施例1にかかる端末(状態通知装置)による状態通知処理手順例を示すフローチャートである。
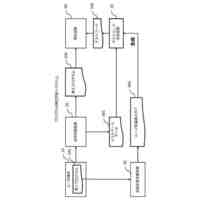
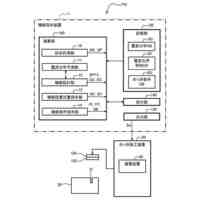
図13は、実施例2にかかる分析システムの機能的構成例を示すブロック図である。
図14は、実施例3にかかる分析システムの機能的構成例を示すブロック図である。
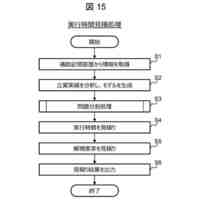
図15は、実施例3にかかるサーバ(学習装置)による学習処理の詳細な処理手順例を示すフローチャートである。
図16は、実施例3にかかるクライアント(推論装置)による状態推論処理手順例を示すフローチャートである。
図17は、実施例4にかかる分析システムの機能的構成例を示すブロック図である。
図18は、教師信号DBから出力される時系列の学習データの一例を示す説明図である。
図19は、実施例5にかかる分析システムの機能的構成例を示すブロック図である。
図20は、実施例7にかかるシフト特徴量群の一例を示す説明図である。
図21は、実施例8にかかる分析システムの機能的構成例を示すブロック図である。
図22は、実施例8にかかるクライアント(学習装置)による学習処理の詳細な処理手順例を示すフローチャートである。
図23は、実施例8にかかるクライアント(推論装置)による状態推論処理手順例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明に係る実施の形態を図面に基づいて説明する。なお、実施の形態を説明するための全図において、同一の部材には原則として同一の符号を付し、その繰り返しの説明は省略する。また、以下の実施の形態において、その構成要素(要素ステップ等も含む)は、特に明示した場合および原理的に明らかに必須であると考えられる場合等を除き、必ずしも必須のものではないことは言うまでもない。また、「Aからなる」、「Aよりなる」、「Aを有する」、「Aを含む」と言うときは、特にその要素のみである旨明示した場合等を除き、それ以外の要素を排除するものでないことは言うまでもない。同様に、以下の実施の形態において、構成要素等の形状、位置関係等に言及するときは、特に明示した場合および原理的に明らかにそうでないと考えられる場合等を除き、実質的にその形状等に近似または類似するもの等を含むものとする。
【0010】
本明細書等における「第1」、「第2」、「第3」などの表記は、構成要素を識別するために付するものであり、必ずしも、数、順序、もしくはその内容を限定するものではない。また、構成要素の識別のための番号は文脈毎に用いられ、一つの文脈で用いた番号が、他の文脈で必ずしも同一の構成を示すとは限らない。また、ある番号で識別された構成要素が、他の番号で識別された構成要素の機能を兼ねることを妨げるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
蓄電装置
6日前
株式会社日立製作所
制御基板
8日前
株式会社日立製作所
回転電機
2日前
株式会社日立製作所
回転電機
21日前
株式会社日立製作所
エレベーター
15日前
株式会社日立製作所
エレベーター
6日前
株式会社日立製作所
コントローラー
29日前
株式会社日立製作所
輸送計画装置及び方法
1日前
株式会社日立製作所
巻上機及びエレベーター
8日前
株式会社日立製作所
分析システム及び分析方法
15日前
株式会社日立製作所
エレベーター及び保護カバー
13日前
株式会社日立製作所
プログラム検証支援システム
2日前
株式会社日立製作所
現新比較テスト支援システム
7日前
株式会社日立製作所
療養指導支援装置および方法
6日前
株式会社日立製作所
めっき装置及びめっき形成方法
21日前
株式会社日立製作所
接点浄化装置及び風力発電装置
7日前
株式会社日立製作所
生産計画立案支援装置及び方法
1か月前
株式会社日立製作所
釣合いおもり及びエレベーター
9日前
株式会社日立製作所
情報処理装置および情報処理方法
6日前
株式会社日立製作所
補修指示装置および補修指示方法
14日前
株式会社日立製作所
電力融通システム、電力システム
7日前
株式会社日立製作所
施策策定方法及び施策策定システム
2日前
株式会社日立製作所
画像解析システム及び画像解析方法
2日前
株式会社日立製作所
契約照会システム及び契約照会方法
1日前
株式会社日立製作所
ラベル付与装置およびラベル付与方法
6日前
株式会社日立製作所
可搬記憶機器および情報処理システム
7日前
株式会社日立製作所
水素の混焼を制御する装置および方法
14日前
株式会社日立製作所
業務支援システム、及び業務支援方法
10日前
株式会社日立製作所
判定システム、判定装置、及び判定方法
21日前
株式会社日立製作所
電力系統制御装置及び電力系統制御方法
13日前
株式会社日立製作所
電気機器、電気機器の筐体、及び航空機
3日前
株式会社日立製作所
支援装置、支援方法、及び支援プログラム
15日前
株式会社日立製作所
検索装置、検索方法、及び検索プログラム
1日前
株式会社日立製作所
支援装置、支援方法、及び支援プログラム
1日前
株式会社日立製作所
保守最適化システムおよび保守最適化装置
29日前
株式会社日立製作所
計算機システム及び業務フローの検索方法
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ