TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085327
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199128
出願日
2023-11-24
発明の名称
線状物取上ハンドおよび線状物取上方法
出願人
倉敷紡績株式会社
代理人
個人
主分類
B25J
15/08 20060101AFI20250529BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】部材の加工コストが低く、交換が容易な線状物取上ハンドを提供する。
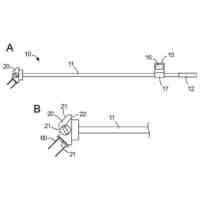
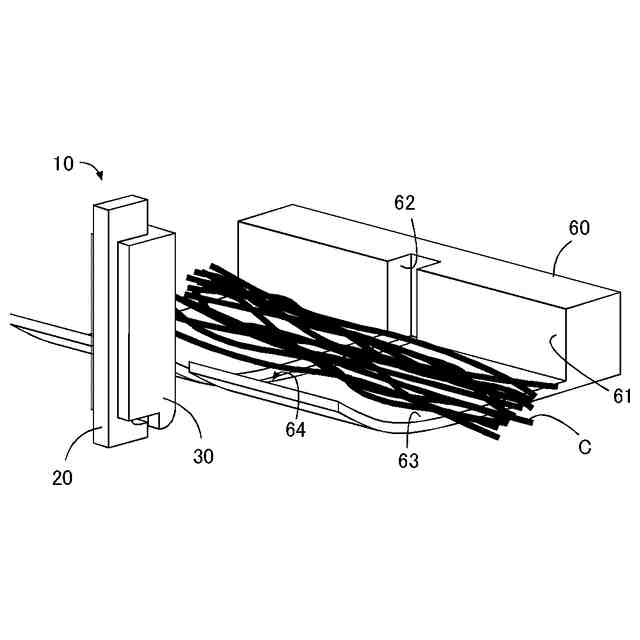
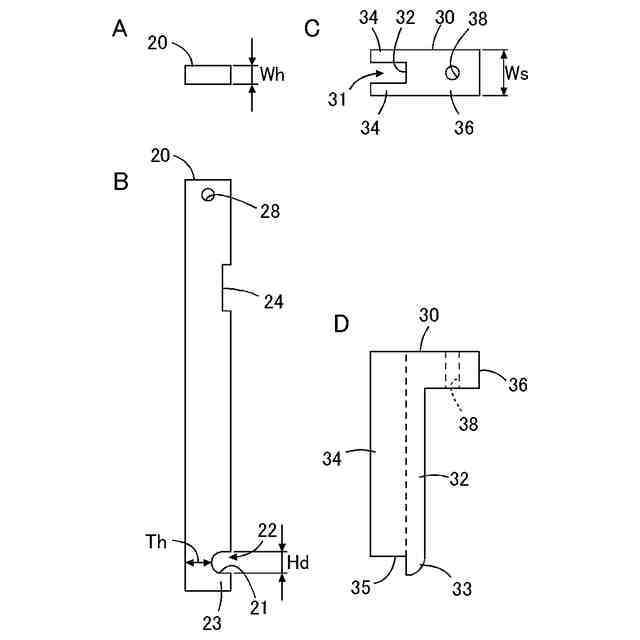
【解決手段】線状物Cの束から前記線状物の1本を取り上げるためのハンドであって、鉤部材20と押さえ部材30を有し、前記鉤部材の先端部は、棒状であって、先端付近の側方に前記線状物が進入可能な入口が形成され、前記線状物の1本が嵌り込む大きさの凹部を備え、前記押さえ部材の先端部は、長手方向に溝が形成された、断面がコの字型の棒状であって、前記溝の側壁を構成する側面部と、前記溝の底を構成し、先端部に前記側面部より長く延出した蓋部を備える底面部からなり、前記鉤部材と前記押さえ部材は互いに嵌合して、相対的に長手方向に摺動可能である線状物取上ハンド10。
【選択図】図4
特許請求の範囲
【請求項1】
線状物の束から前記線状物の1本を取り上げるためのハンドであって、
鉤部材と押さえ部材を有し、
前記鉤部材の先端部は、
棒状であって、
先端付近の側方に前記線状物が進入可能な入口が形成され、前記線状物の1本が嵌り込む大きさの凹部を備え、
前記押さえ部材の先端部は、
長手方向に溝が形成された、断面がコの字型の棒状であって、
前記溝の側壁を構成する側面部と、
前記溝の底を構成し、先端部に前記側面部より長く延出した蓋部を備える底面部からなり、
前記鉤部材と前記押さえ部材は、
前記鉤部材が前記入口を前記底面部に向けて前記溝にはまるように前記押さえ部材と嵌合して、
少なくとも、前記蓋部が前記入口を塞ぐ位置と、前記蓋部が前記入口より前記鉤部材の基端側にあって前記入口を開放する位置との間で、相対的に長手方向に摺動可能である、
線状物取上ハンド。
続きを表示(約 630 文字)
【請求項2】
前記鉤部材と前記押さえ部材が、少なくとも、前記蓋部が前記入口を塞ぎ、かつ前記側面部の前端が前記凹部に嵌り込んだ前記線状物を前記鉤部材の先端方向に押圧可能な位置と、前記蓋部が前記入口より前記鉤部材の基端側にあって前記入口を開放する位置との間で、相対的に長手方向に摺動可能である、
請求項1に記載の線状物取上ハンド。
【請求項3】
前記鉤部材の先端と前記凹部の間に形成された顎部が、前記凹部が前記入口に向かうにつれて広くなるように、楔形に形成されている、
請求項1に記載の線状物取上ハンド。
【請求項4】
前記鉤部材と前記押さえ部材の長手方向における位置関係を検出するセンサをさらに有する、
請求項1に記載の線状物取上ハンド。
【請求項5】
請求項1~4のいずれかに記載された線状物取上ハンドを用いて前記線状物を取り上げる方法であって、
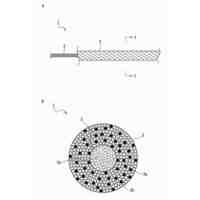
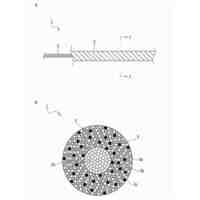
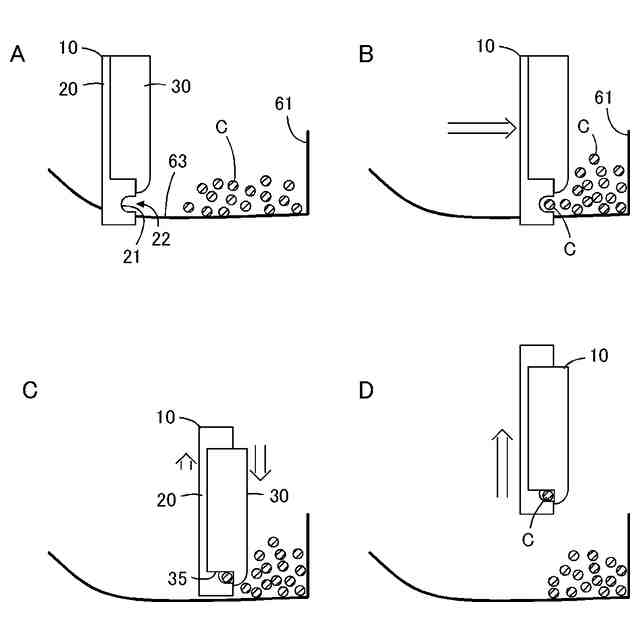
片側に壁を配した載置面に、該壁に略平行に前記線状物の束を載置する工程と、
前記線状物取上ハンドを、前記入口を開放した状態で、前記壁と反対方向から前記線状物の束に押し付けて、前記線状物の1本を前記凹部に嵌入させる工程と、
前記鉤部材および/または前記押さえ部材を長手方向に移動させて、前記蓋部で前記入口を塞ぐ工程と、
前記線状物取上ハンドの全体を上昇させる工程と、
を有する線状物取上方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、線状物を取り上げる装置および方法に関し、より詳細には、細く柔軟な線状物の束から1本の線状物を取り上げるのに適した装置および方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
細く柔軟で変形しやすい線状物を対象とする様々な作業において、ロボットを用いて線状物のハンドリングを自動化することが行われている。例えば、電線等のケーブル、光ファイバ、各種チューブ類を対象として、端子の圧着、コネクタ等部品の装着、半田付け、溶着、接続などの作業を行う際に、ワークとなる線状物をロボットハンドで把持して、目標となる加工装置や検査装置まで移送してセットすることが行われている。
【0003】
このとき、ロボットハンドはまず、供給トレイ等で供給された複数の線状物の中から1本の線状物を把持する必要がある。特許文献1には、柔軟で形状が定まらない複数の線状物の3次元形状を計測し、そのうちの1本を他の線状物と干渉しないでロボットハンドで把持可能かを判定して、把持する方法が開示されている。しかし、線状物の数が例えば数十本あるいは数百本と増えると、特許文献1に記載された方法では3次元形状の計測のための計算負荷が重くなるため、予め多数の線状物から1本を抜き出しておいて、抜き出した線状物をロボットハンドで把持する方が効率的な場合があった。
【0004】
これに対して、特許文献2には、線状物を挟持可能な一対の指と、一対の指の間に形成され、線状物の1本が嵌る溝と、線状物を溝に向けて吸引する吸引手段とを有し、多数の柔軟な線状物から1本を取り上げるのに適した線状物把持装置が記載されている。この線状物把持装置で取り上げた1本の線状物を、3次元計測を行うことなく、他のロボットハンドで把持することができる。
【先行技術文献】
【特許文献】
【0005】
国際公開第2019/098074号
特開2023-090089号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献2に記載された線状物把持装置は、扱う線状物の種類が多い場合に問題があった。線状物が嵌入する溝の大きさは線状物の径に合わせて最適化されるので、線状物の径が変わると指を交換する必要がある。特許文献2の装置では真空吸引を行うため、片方の指の内部に吸引孔を形成する高度な加工が必要で、線状物の径ごとに揃える指の加工コストが高く、指の交換作業も手間のかかるものであった。また、線状物把持装置を上方から所定の位置に降下させて線状物を把持するために、収容部に載置された線状物を指の真下に向けて寄せる手段(中寄せ手段)を必要とし、線状物が例えば異なる色ごとにトレイを分けて供給される場合は、トレイごとに設けられる中寄せ手段によって、装置の設置スペースが大きくなるという問題もあった。
【0007】
本発明は、上記を考慮してなされたものであり、線状物を把持する部材の形状が単純で加工コストが低く、交換が容易な線状物取上ハンドを提供することを目的とする。また、線状物が複数のトレイに分けて供給される場合でも、設置スペースを小さく抑えられる線状物取上ハンドを提供することを目的とする。
【課題を解決するための手段】
【0008】
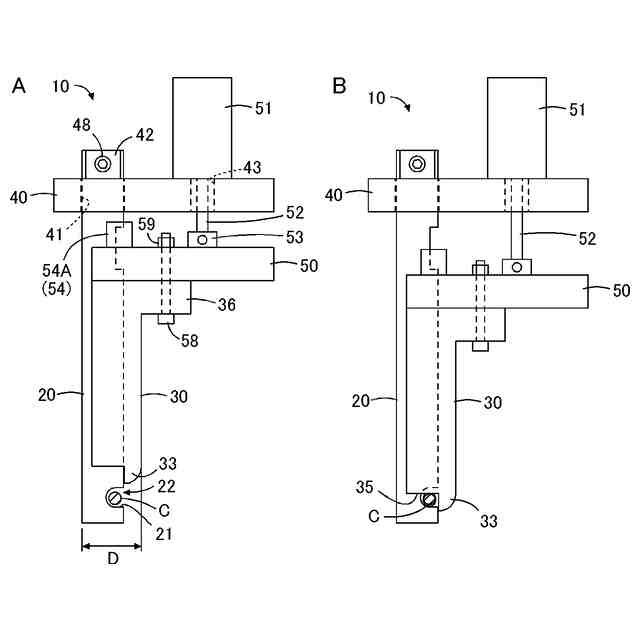
本発明の線状物取上ハンドは、線状物の束から前記線状物の1本を取り上げるためのハンドであって、鉤部材と押さえ部材を有する。前記鉤部材の先端部は、棒状であって、先端付近の側方に前記線状物が進入可能な入口が形成され、前記線状物の1本が嵌り込む大きさの凹部を備える。前記押さえ部材の先端部は、長手方向に溝が形成された、断面がコの字型の棒状であって、前記溝の側壁を構成する側面部と、前記溝の底を構成し、先端部に前記側面部より長く延出した蓋部を備える底面部からなる。前記鉤部材と前記押さえ部材は、前記鉤部材が前記入口を前記底面部に向けて前記溝にはまるように前記押さえ部材と嵌合して、少なくとも、前記蓋部が前記入口を塞ぐ位置と、前記蓋部が前記入口より前記鉤部材の基端側にあって前記入口を開放する位置との間で、相対的に長手方向に摺動可能である。
【0009】
ここで、入口は、鉤部材と略直交する線状物が凹部に進入するための入口である。この構成により、線状物の径に応じて鉤部材を交換する場合でも、鉤部材の加工コストは低く、交換作業は容易である。
【0010】
上記線状物取上ハンドは、好ましくは、前記鉤部材と前記押さえ部材が、少なくとも、前記蓋部が前記入口を塞ぎ、かつ前記側面部の前端が前記凹部に嵌り込んだ前記線状物を前記鉤部材の先端方向に押圧可能な位置と、前記蓋部が前記入口より前記鉤部材の基端側にあって前記入口を開放する位置との間で、相対的に長手方向に摺動可能である。これにより、線状物取上ハンドで線状物を把持して持ち上げたときに、凹部内の線状物がその長さ方向に滑って脱落することがない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
倉敷紡績株式会社
パイル糸及びタオル生地
12日前
倉敷紡績株式会社
ジオポリマー硬化体の製造方法
5日前
倉敷紡績株式会社
線状物収容システムおよび線状物収容方法
12日前
倉敷紡績株式会社
測定ピン設置用治具および測定ピン設置方法
1か月前
グンゼ株式会社
芯鞘構造紡績糸、生地、衣類及びこれらの製造方法
14日前
株式会社西日本断熱
フロート、およびフロートの製造方法
14日前
倉敷紡績株式会社
被覆材の厚さ計測方法および被覆材の施工方法
5日前
倉敷紡績株式会社
紡績糸及びそれを用いた速乾性生地並びに速乾性衣料
19日前
株式会社ザイテック
吸着装置
19日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
8日前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
搬送装置
12日前
住友重機械工業株式会社
教示装置
5日前
個人
ペグハンマおよびペグハンマ用部品
12日前
川崎重工業株式会社
ロボット
6日前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
5日前
工機ホールディングス株式会社
作業機
5日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
12日前
住友重機械工業株式会社
支援装置
12日前
株式会社マキタ
電気機器
6日前
アピュアン株式会社
衝撃工具
14日前
ホシデン株式会社
分解用治具
12日前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
27日前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
8日前
株式会社リコー
多関節ロボット
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ